- スマートシティ/モビリティ事業 HOME
- ユースケースで探す
-
製品・サービスで探す

- イベント・
セミナー -
事例・コラム
- お問い合わせ

多岐に渡る最新技術が結集した自動運転業界。従来の自動車業界に加え、新規参入が後を絶たない。大まかに「認知」「判断」「制御」のプロセスによって自動運転は実現するが、それぞれを構成する技術にはどのようなものがあり、どのような仕組みで成り立っているのか。
自動運転の仕組みとそれを構成する10の要素技術について解説していく。

自動運転の仕組み:「認知」「判断」「制御」
自動運転は、ドライバーによる認知や予測、判断、制御に関する各能力をシステムが代替することで実現する。
車両に搭載されたカメラやLiDAR(ライダー)、ミリ波レーダーといったセンサーが「目」の役割を担い、車両の周囲や前方を常時監視し、センサーが取得した画像データなどから他の車両や歩行者、道路上の白線、標識などを認識し、安全に走行するためAI(人工知能)が「脳」となってアクセルやブレーキ、ハンドルなどの制御を判断する仕組みだ。
センサーとAIのみで自動運転の実現を目指す企業もあるが、多くはGPSなどの衛星測位システムや高精度3次元地図、路車間通信(V2I/Vehicle-to-Infrastructure)・車車間通信(V2V/Vehicle-to-Vehicle)といったV2X技術を活用し、安全性の向上を図っている。
高精度3次元地図は、道路上や周辺を精密に3Dマッピング化したもので、走行レーンや白線、標識をはじめ、自動運転車が必要とするさまざまな道路情報が付加されている。この高精度3次元地図に交差点の信号情報や混雑状況、事故情報などをリアルタイムで追加したものをダイナミックマップという。
自動運転車は、この高精度3次元地図をベースに、センサーが映し出した画像やGPS情報などを照合しながら自車位置を把握し、正確な走行を実現する。
また、道路周辺のインフラや周囲を走行する車両、自動運転システムを管理するサーバーなどと常時通信を行い、道路交通に関するさまざまな情報を取得したり、センサーデータや車両の走行状況を示すプローブデータなどをサーバーとやり取りしたりすることで、安全性や自動運転システムの能力向上を図る。
このほかにも、道路に敷設した磁気マーカーを読み取ることで自車位置を把握する自動運転システムなどもある。路線バスのようにあらかじめ走行ルートが決まっている自動運転サービスでの実用化に期待が寄せられている技術だ。
①AI:「脳」としての機能などを担う

後述する他の技術においてもほぼすべてで使用されているAI(人工知能)技術は、自動運転においてもはや普遍的な存在と言って良いだろう。
自動運転におけるAIの役割の中で目玉と言えるのは、「脳」としての機能だ。センサーが取得した各種データや通信データなどを総合的に解析し、車両をどのように制御すべきか判断を下す。近年、ディープラーニング(深層学習)をはじめとしたAI学習方法が大幅に進化し、自動運転を実現する核技術としても研究開発が盛んに進められている。
なお、AIの判断を巡っては、トロッコ問題(トロリー問題)がよく持ち出される。いずれの選択肢も何らかの犠牲を伴う場合、AIはどのような判断を下すか、あるいはどのような判断を下すよう学習させるかといった内容だ。道路交通を取り巻く環境は複雑なため、時にAIも厳しい選択を迫られる可能性は十分考えられる。
周囲の車両やインフラなどと通信を交わしいち早く情報を入手するほか、予測技術などを駆使してリスクを最小限に抑えることも当然必要だが、AI開発の過程でこうした問題に直面する日が近い将来訪れるかもしれない。
②認識:周囲の車両や歩行者、道路の白線を認識

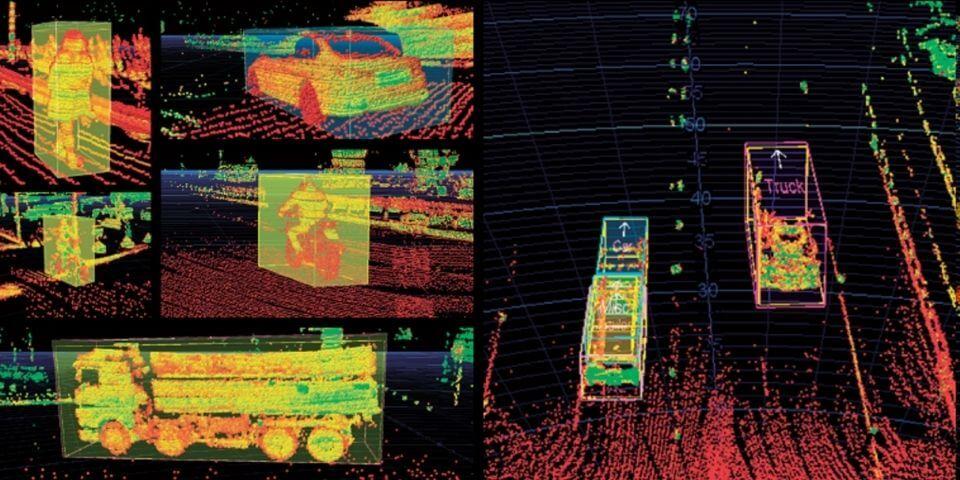
英語で「パーセプション(perception)」と呼ばれるもので、自動運転においてはカメラやLiDAR(ライダー)などの各種センサーが取得したデータに何が映っているかを認識する技術を指すことが多い。
カメラなどが取得したデータには、周囲を走行する車両や歩行者、道路の白線、信号機などさまざまなモノが映っているが、これらを識別するのが認識技術だ。いかに正確かつ迅速に識別するかは走行安全性に直結するため、自動運転の肝と言える重要技術で、AIがその役割を担っている。
また、センサー自体も、いかに広範囲を正確に識別しやすい形でデータ化できるかが問われるため、認識ソフトウェアとともにハード面でのさらなる進化も求められている。
③位置特定:自車両の位置を導き出す

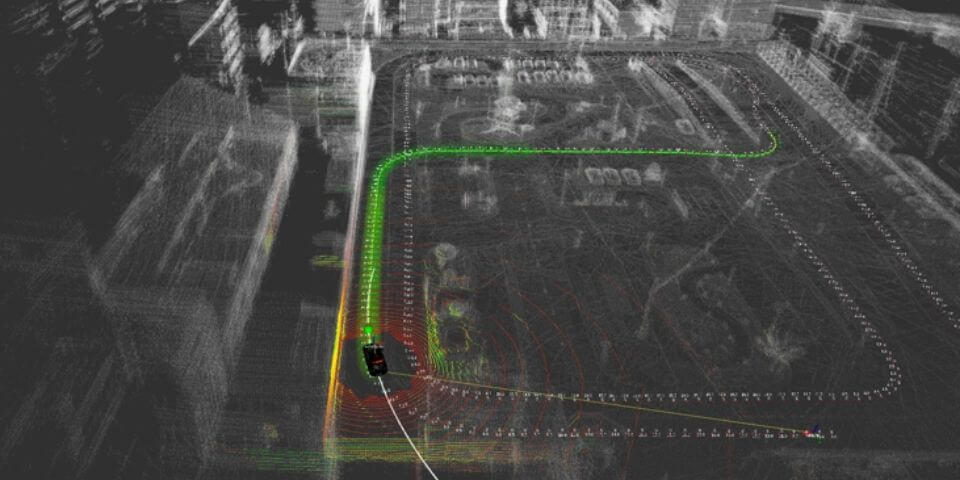
英語で「ローカライゼーション(localization)」と呼ばれるもので、自動運転においては自車両の位置を導き出す技術だ。
位置特定にはGPSやQZSS(準天頂衛星システム)などの衛星測位システムを使うケースが多いが、高精度3次元地図上のデータと車載センサーに映し出されたデータを照合して自車位置を確認する手法や、位置の特定と地図作成を同時に行うSLAM、走行するルートに敷設した磁気マーカーを読み取る技術など、さまざまな手法がある。
トンネルなど衛星測位システムが機能し辛い環境に備え、上記の手法やIMU(慣性計測装置)、DMI(走行距離計)などを併用するケースもスタンダードとなっている。
④予測:歩行者や自転車の飛び出しなどを予測

英語で「プレディクション(prediction)」と呼ばれるもので、あらかじめ予測したリスクをもとに車両を制御することで、事故を未然に防止する。
例えば、見通しの悪い交差点において歩行者や自転車の飛び出しを予測してあらかじめ速度を落としたり、天気予報をもとに運行計画を立てたりすることなどが考えられる。
また、歩行者や周囲の車両の挙動を予測する技術も研究が進められている。歩行者の目線や顔の角度などをもとに進行方向の変化などを先読みすることでリスクを回避する技術だ。
⑤通信:管理サーバーや道路インフラ、周囲車両と通信
安全性能を高めるため、自動運転車はクラウドを含む管理サーバーや道路インフラ、周囲の車両などと常時通信しながら走行する。
車車間通信(V2V)で自車の挙動や接近を周囲の車両に伝達したり、交差点における路車間通信(V2I)で信号情報や周辺の歩行者情報を受信したり、道路工事や事故、落下物の情報、走行レーンごとの渋滞情報などを適時受信したりすることが考えられる。
また、センサーが取得したデータやプローブデータなどをクラウドに送信することで、認識技術の向上に役立てる取り組みや、テレマティクス保険に活用する取り組みなども進められている。
通信データは膨大な量に上るため、商用化が始まった移動通信システム「5G」をはじめ、さまざまな通信手法を駆使して途切れることのない高速かつ大容量、低遅延の通信システムを確立させることが求められそうだ。
⑥プランニング:目的地までのルートを最適化

プランニングにおいては、目的地までのルートをどのように設定するか、ルート最適化技術が問われる。カーナビ同様、通行止め情報などを加味したルーティングに加え、自動運転システムの能力に応じて安全走行が可能なレーンやルートを選択することなども考えられる。人間による運転と異なり、想定外の事態に陥った際の判断が難しいからだ。
自動運転によるオンデマンド移動サービスや配送サービスなど複数のスポットをめぐる場合、ルート最適化技術は必須となる。既存技術をそのまま応用できそうだが、自動運転に対応した技術として、周囲の車両の動向をリアルタイムで解析しながら不測の事態を回避して確実性の高いルーティングを行う技術なども必要とされるかもしれない。
⑦サイバーセキュリティ:サイバー攻撃による乗っ取りなどを防ぐ

常時通信を行いながら走行する自動運転車は、常にサイバーセキュリティ上の脅威にさらされているとも言える。サイバー攻撃により、制御システムをはじめとした各機能が乗っ取られれば、人命に直接かかわる事案に発展するからだ。
簡易な通信機能を備えた現行車両においても、特定の機器から制御システムへの侵入に成功した事例は決して少なくない。コネクテッド化された車両の危険性を象徴するかのように、2019年に独ダイムラーとBMWが展開するカーシェアサービス「Share Now」の車両が米国でハッキングされ、100台以上が盗難された事件も発生している。
自動運転車はさまざまなシステムが多岐に渡る通信手段を使用するため、ハッキングの出入り口も当然多くなる。自動車業界を通じたサイバーセキュリティに関するガイドラインの策定や情報共有体制の構築をはじめ、新たな脆弱性や脅威を検出する研究開発が将来にわたり必要不可欠となる。
また、万が一を想定し、ハッキングを受けた際に安全に車両を停止する技術や不動化する技術なども必要になるのかもしれない。
⑧HMI:機械と人のコミュニケーションを円滑化

コンピュータが自動車を制御する自動運転車においては、機械と人が情報や意思をやり取りするHMI(ヒューマンマシンインターフェース)技術も必要となる。ドライバーが運転をはじめとした各操作を直接制御する機会が減少するからだ。
自動車の運転をはじめ、将来的には目的地の設定やエアコンの制御、オーディオの制御なども一切機器類を操作せず音声によって命令を下したり、自動運転車からのアナウンスを視覚や音声によって効果的に乗員に伝えたりすることが考えられる。必要な情報をいかに効果的かつ正確に相互伝達するかが問われるのだ。
また、車両の外にいる歩行者らと自動運転車がコミュニケーションを図る技術開発なども進められている。自動運転車の挙動を周囲に伝達することで、より安全を高めることが可能になるほか、移動サービス系の自動運転車であれば、歩行者からの乗車意思を伝達・確認することなども考えられる。
⑨モニタリング:ドライバーや乗員の挙動を監視

自動運転レベル3の解禁により、ドライバーモニタリング機能の搭載が義務付けられた。システムによる自動運転と手動運転が混在するレベル3では必須の技術だ。
ドライバーモニタリングシステムは、手動運転時におけるドライバーの挙動を車内カメラで監視する。頭の傾きやまばたきの回数、目線などを常時観測し、よそ見や居眠り運転などの危険を未然に防止するもので、近年のADASにも採用されている。
レベル3では、自動運転システムからドライバーへ運転操作の委譲要求(テイクオーバーリクエスト)があった際、ドライバーが迅速に運転操作に戻れるかが問われる。万が一居眠りなどで反応がない場合、車内カメラによる監視映像や反応に基づいて警告を発し、それでも反応がない場合は車両を安全に停止させることになる。
ハンズオフ運転が可能な高度なレベル2をはじめとするADASにおいても同様だが、ドライバーの状況をいち早く察知し、危険を回避する重要な技術だ。
レベル4以降では、自動運転バスやタクシーなどにおいて乗員の挙動を見守り安全性を高めるために役立てられる。レベル4以降の乗用車においては、必ずしもドライバーに運転義務が課せられることにはならないため、従来の「安全運転を促す」主旨とは異なるが、乗員の姿勢を監視することで乗り心地を向上させる機能や、HMIの1つとして乗員の要望を受け付ける機能、表情を読み取って何らかのサービスを提案する機能など、さまざまな進化系が考えられる。
⑩データ処理:膨大なデータを蓄積・高速処理

取り扱うデータ量が膨大になる自動運転車は、大量のデータを蓄積・高速処理する技術が欠かせないものとなる。1台の自動運転車が取り扱うデータは1日当たりテラバイト級、あるいはそれ以上と言われており、大容量かつ耐久性の高いストレージや高速処理が可能なプロセッサなどが必須となる。
データ処理を巡っては、自動運転車サイドのエッジと管理者サイドのクラウド、その中間に位置するエッジサーバーなどによる分散コンピューティングの考え方を導入し、効率的処理を推進する動きなどもある。
また、収集したデータをビッグデータとして有効活用する観点から、クラウドを活用したデータ収集技術や解析技術なども問われることになるだろう。
最後に
自動運転車は、センサーを主体とした認識技術により周囲の状況を把握し自車位置を把握しながら、AIが制御命令を下す。また、予測技術や通信技術、プランニング技術によって交通上の安全性や効率性を高め、車内ではHMI技術やドライバーモニタリング技術で乗員の安全性や快適性を高める。
これらの各機能をサイバーセキュリティ技術やデータ処理技術が支えるといった具合に、それぞれの技術が複合的に結び付くことで自動運転は実現するのだ。
今後、車内エンターテインメントや各種移動サービスなど、自動運転車を活用したビジネスやサービス面でも大きく進展していくことが予想される。その過程で新たな要素技術も誕生し、業界がさらなる発展を遂げることに期待したい。
お問い合わせ
当社マクニカでは、自動運転に関する様々な製品やサービスを提供しています。自動運転に関するご質問やご要求などございましたら、以下よりお気軽にお問い合わせ下さい。