- スマートシティ/モビリティ事業 HOME
- ユースケースで探す
-
製品・サービスで探す

- イベント・
セミナー -
事例・コラム
- お問い合わせ
Kudanについて
「すべての機械の眼となっていく」をビジョンにKudanは自己位置推定と環境地図作成を同時に行う技術であるSLAMを独自に開発してきました。
この技術は自動運転やロボティクス、AR/VR、スマートシティなど巨大な応用可能性を秘めており、私達の生活の様々な局面での変革をもたらしていきます。
2014年に立ち上がったKudanは長年の研究、商用実装化に注力し自動運転の社会実現に貢献しています。
KudanSLAMサービスの特徴
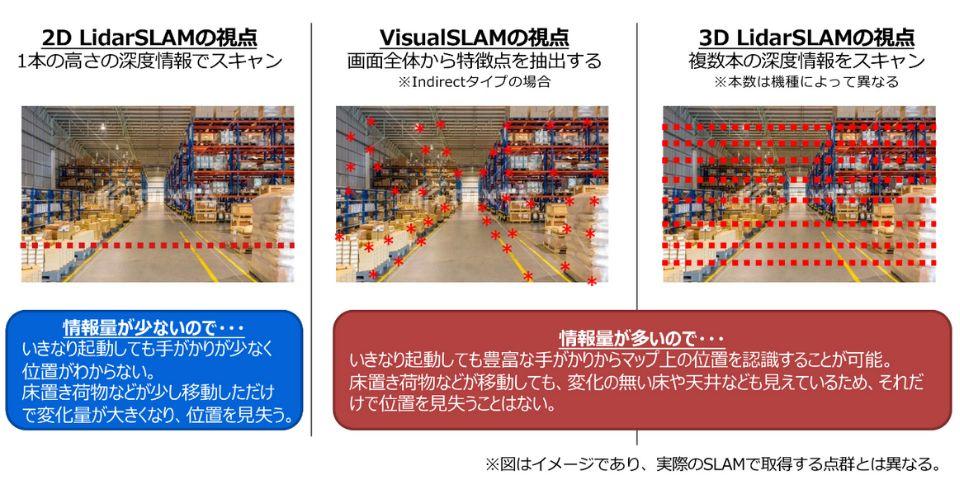
現在一般的に自動走行ロボットなどでは2D Lidarを用いて二次元で世界を認識しています。しかし、それだけでは情報量が少なく、運用できるエリアが限られていました。
KudanSLAMでは、カメラや3D Lidarを用いて三次元で世界を認識するSLAMを提供しています。これにより、屋内外シームレスな移動や環境変化の大きい環境でも運用可能になり、幅広い活用が可能になります。
一般的なSLAM技術の説明は、別途コラムがございますのでそちらもご参考ください。
プロダクトラインナップ
商用グレードの自己位置推定・環境地図作成技術の提供が可能です。オープンソースでのSLAM課題として、精度が不十分な場合があることや商用として使用できない問題があります。KudanSLAMは長年の研究と実装化を通し、カメラSLAM【KdVisual】と、3D LiDAR SLAM【KdLidar】の2種類の製品技術をご提供可能です。
KdVisual
カメラ画像の特徴点を抽出し、その点からの距離をベースにそれぞれのSLAM形式に対応した製品を提供可能です。様々なカメラ、ステレオカメラ、デプスセンサーに対応可能であることや、処理が軽いことで製品実装のハードルが低くなっています。刻一刻と環境が変化する状況にあっても、他のSLAMアルゴリズムと比較して処理時間の大幅短縮、高精度、かつ高堅牢性を実現しています。
KdLidar
これまでのLiDARを用いた自己位置推定と環境地図作成・運用が抱える問題である精度やデータ処理量を克服した、独自のLiDARSLAMです。LiDARの種類も一般的に使用される回転式タイプ以外にソリッドステート式にも対応しており、お客様の環境に幅広く適用可能です。また、簡易なハードウェアでも高精度な3D点群地図が取得可能なため、デジタルツインソリューションにも活用されています。
最高のパフォーマンスとセンサ構成の高い自由度
KudanSLAMはカメラ、LiDAR以外に、ToF、IMU、GNSS、ホイールオドメトリなどの幅広いセンサーデータとの統合が可能です。例えばIMUセンサとの統合によって移動物体に惑わされない自己位置推定が可能であることや、GNSSと併用し広域屋外での累積誤差を解消することも可能です。
これらKudanの高いセンサフュージョン技術は、様々な環境で高い精度と環境への頑強性を担保し、建機から屋内ロボットまで幅広いユースケースに対応します。
導入しやすい評価パッケージを現場ごとに準備
お客様環境でのSLAM実装はキャリブレーションやセンサー配置など細かな調整が必要です。お客様にKudanSLAMの魅力を手軽に感じていただくため、買い切りの簡易評価パッケージをKudanは準備しております。

初期評価パッケージ

マッピングDevキット
ユースケース
自働車/ロボット/ドローンの自律走行やデジタルツインマッピングを中心に近年注目されているアプリケーションで活用可能です。
自動運転車
ロボット掃除機
ドローン
AGV(無人搬送車)
VR / AR / MR
お問い合わせ
Kudanに関するご質問やご不明点などございましたら、こちらよりお気軽にお問い合わせ下さい。