- スマートシティ/モビリティHOME
- ユースケースで探す
-
製品・サービスで探す

- イベント・
セミナー - コラム
- お問い合わせ

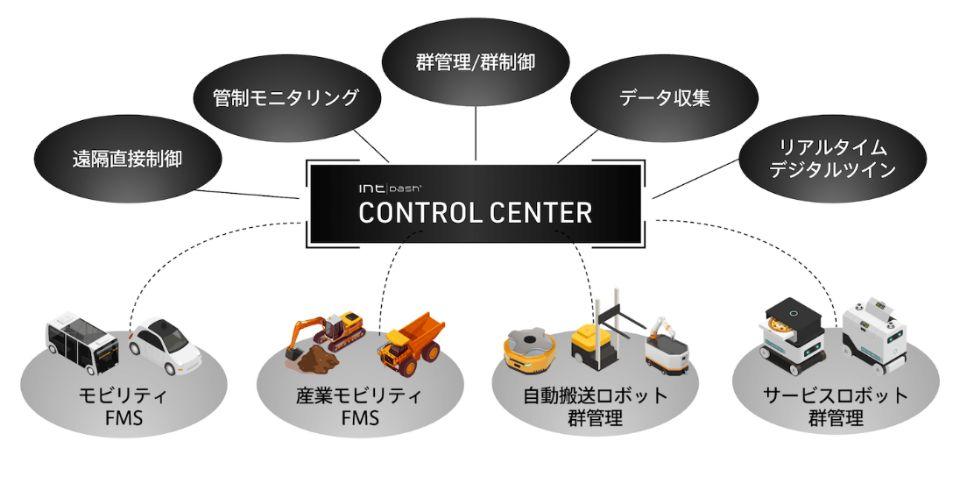
モビリティ/ロボット群管理・遠隔制御 CONTROL CENTER
intdash CONTROL CENTERは、モビリティやロボットのリアルタイムでインタラクティブな管制制御システムの迅速な構築を可能にするソリューションフレームワークです。スマートシティにおける自動運転車、工場や物流倉庫における搬送ロボット、建設現場における建設機械など、様々なモビリティ群の統合遠隔監視・管理、遠隔制御システムの迅速な構築を実現します。
特徴
統合的な制御システム管理、リアルタイム監視と操作、データの収集と分析、リモートサポートと遠隔診断、通知とアラート機能、ユーザーフレンドリーなインターフェース等を兼ね備えております。CONTROL CENTERではマルチロボットの群管理ミドルウェアである『Open-RMF』との連携により、同一フィールドに存在する複数のロボットやモビリティの効率的な管理と監視を実現し、対象機器のパフォーマンス向上やメンテナンス効率化に貢献します。
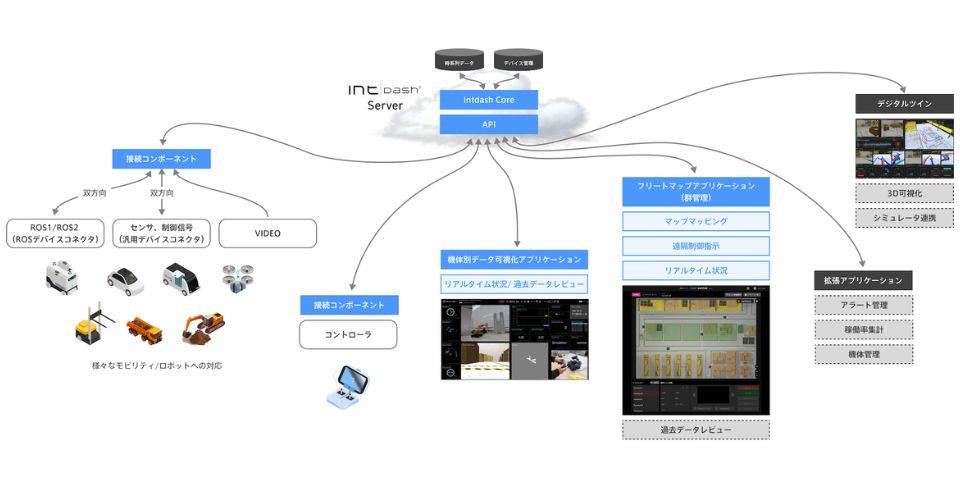
構成例
モビリティ/ロボットなどの機体との送受信処理を行うエッジソフトウェアコンポーネントとデータストリーミング中継処理やデータ保存を行うサーバ・ソフトウェア、及びリアルタイムな群管理や、個別機体の状態モニタを行うことができるWebアプリケーションコンポーネントで構成されます。
ユースケース
RobOps:マルチロボット群管理
Smart Mobility FMS:モビリティの管制と遠隔制御
i-Construction:建設現場のデジタルツイン



実現する機能
リアルタイムなフリートマップマッピング
機体群の位置情報、映像などをマップマッピングし、Webベースの統合監視環境
・屋内シナリオにおける対象となるエリアの躯体図などをSVG形式でマップ利用したUI開発
・屋外シナリオにおけるOpenStreetMapやGoogle Mapsなどを利用したUI開発
・機体個別や群全体に対するコマンド送信による遠隔指示の実装
機体群の管理UI
機体群のステータス一覧や、SoC・稼働率の管理
・カスタマイズ可能なステータス一覧
・SoC一覧
・稼働状況グラフ
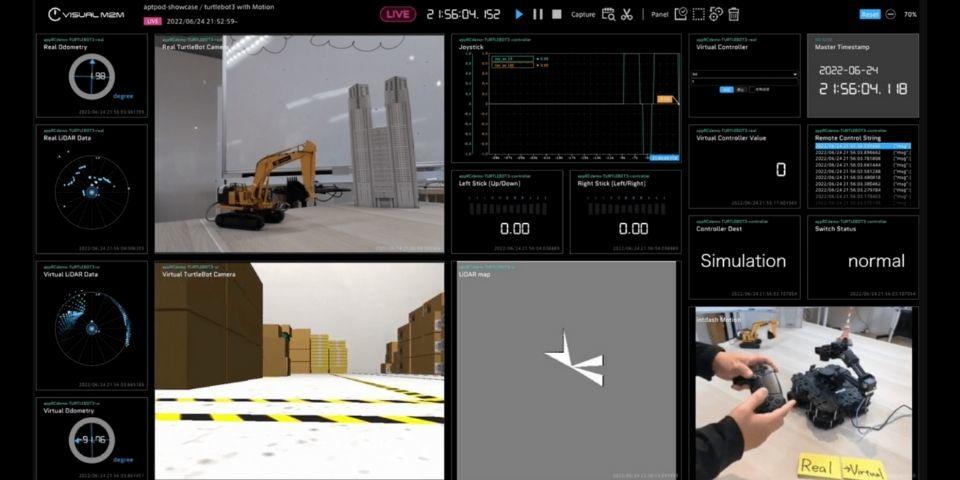
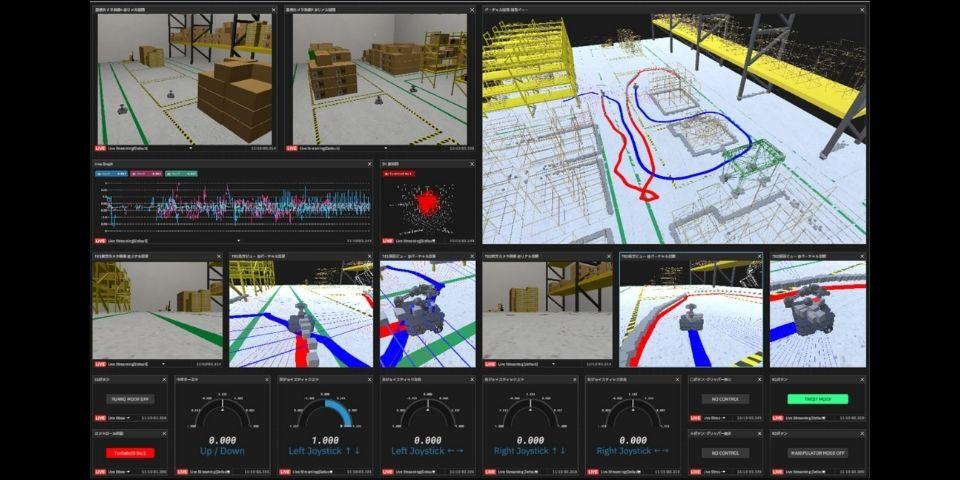
個別機体の様々なリアルタイムデータ確認が可能なダッシュボード
リアルタイムな機体詳細データをダッシュボード表示
・制御データ、映像データなど様々なデータをリアルタイム表示
・ノンプログラミングでユーザーによる自由なダッシュボード構成が可能
遠隔操作、操縦
遠隔制御コントローラー向けのコンポーネントを提供
・ゲームコントローラーなど制御指示デバイスの接続による遠隔操作の実装
ロボット、モビリティ、センサーからカメラまで様々なデバイスの接続
様々なデバイスが接続するための接続コンポーネントを提供
・ロボットにおけるROS1/ROS2
・モビリティにおけるCAN(Controller Area Network)
・汎用センサー、ビデオなどのセンサデバイス
・様々な形式のデータをフュージョンストリーミング可能
データの収集と活用
運用時のすべてのデータを過去データとしてサーバに永続化
・詳細なデータ解析フローを実現
・異常発生時のデータレビューが可能
・汎用センサー、ビデオなどのセンサーデバイス
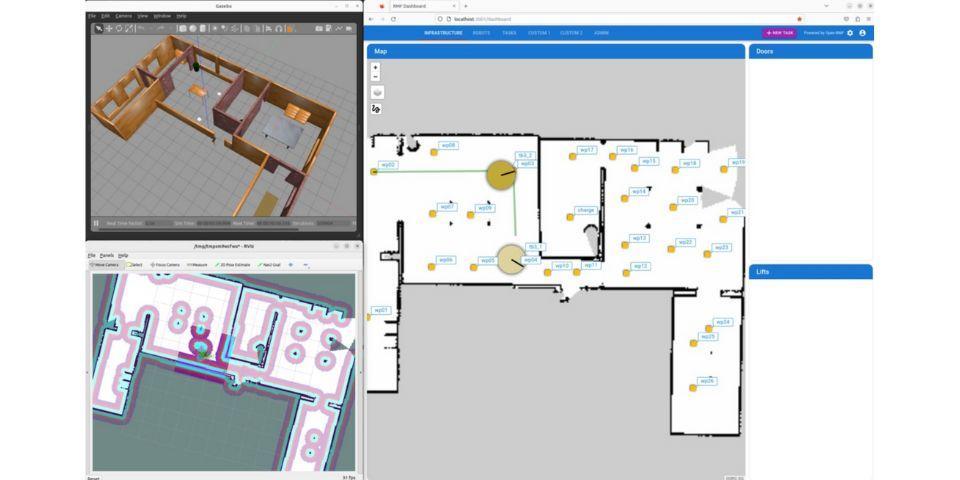
RobOps機能の強化
ロボットの開発からマルチロボット運用までをサポート
・マルチロボット群管理ミドルウェア『Open-RMF』に対応
・ロボットのルート設定、タスク設定
・マルチロボットの衝突回避などの協調管理
拡張性
豊富なAPI、SDKによりリアルタイムデータ処理アプリケーションを開発可能
ユースケースに応じた拡張が可能
・アラート機能
・詳細データ活用した異常解析
・リアルタイム分析による異常検知
・AIを活用したリアルタイム検知
・稼働率計算
デジタルツイン環境の構築
・Unity向けSDK(提供予定)によるUnityでのデジタルツインアプリケーションの開発
・シミュレータとの接続によるデジタルツイン環境を実現
問い合わせ
CONTROL CENTERに関するご質問やご不明点などございましたら、こちらよりお問い合わせ下さい。お気軽にご相談下さい。