- スマートシティ/モビリティ事業 HOME
- ユースケースで探す
-
製品・サービスで探す

- イベント・
セミナー -
事例・コラム
- お問い合わせ
概要
センサーから得られたデータをもとに自己位置推定と環境地図作成を同時に行う「SLAM」技術について、ユースケースに合わせた最適なセンサーのコンサルティングからライセンスの提供、実装までの技術サポートなど、お客様環境でのSLAMの活用をトータルで支援します。
SLAMについて
SLAMはSimultaneous Localization and Mappingの略称で、自己位置推定と環境地図作成を同時に行う技術です。未知の環境下において、カメラやLiDARなどのセンサーからの入力をもとに、自分がどこにいるのか(自己位置推定)、周囲がどうなっているのか(環境地図作成)把握することができます。これにより自動運転やAGV、ロボットなど、様々なアプリケーションへの適用が期待されます。
SLAMの優位性
自己位置推定と環境地図作成は相互依存関係にあります。自己位置推定には地図が必要で、環境地図作成には位置が必要です。自己位置推定や環境地図作成をそれぞれ個別に行う技術はありますが、SLAMではこれら2つを同時に行うことができます。
例えば、現在地を把握する方法として、GNSS(測位衛星システム)やデッドレコニング(IMU、オドメトリなど)がありますが、いずれも同時に環境地図作成をすることはできません。さらに、GNSSは屋内だと電波が届かない、デッドレコニングは長距離走行で誤差が蓄積してしまうなどの問題がありますが、SLAMでは屋内外を問わず適用することができ、現在地の把握と同時に環境地図作成を同時に行うことができます。なお、SLAMではGNSSやデッドレコニングを組み合わせることで、より高精度な自己位置推定を行うこともできます。
SLAMの種類
SLAMは様々なセンサーからの情報を入力として実行され、使用するセンサーに応じて「LiDAR SLAM」、「Visual SLAM」、「Depth SLAM」に分類することができます。それぞれ特徴がありますので、要求仕様やご予算に応じて、どのセンサーを使用するかを選択することが重要です。

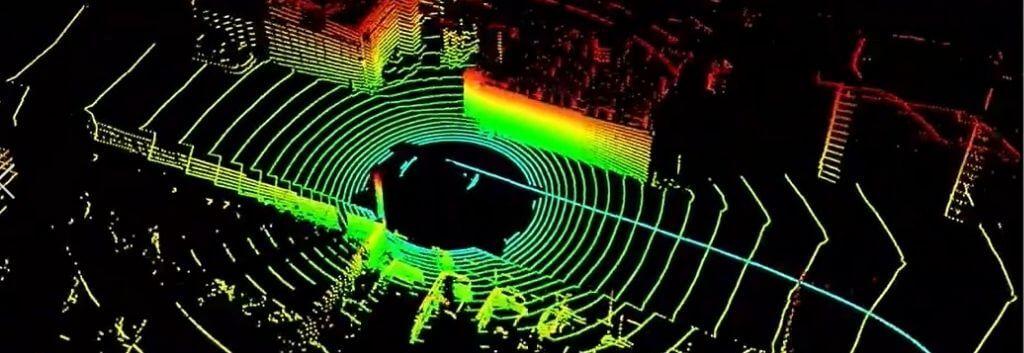
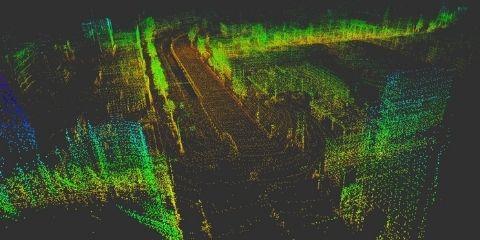
LiDAR SLAM
LiDAR SLAMはレーザスキャナ(LiDAR)で取得した点群データからSLAMを実行します。LiDARは非常に高い精度で物体までの測距を行うことができますので、高精度なマップを生成したい場合に使用することが多いです。また、カメラと比べて遠距離での測距精度に優れているため、自動車などの高速移動体でSLAMを実行する場合に適しています。
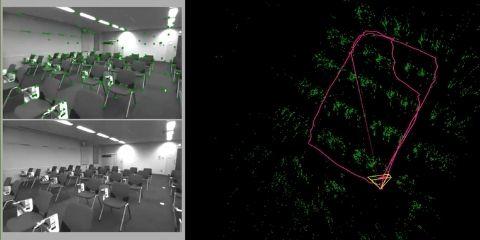
Visual SLAM
Visual SLAMはカメラで取得した画像からSLAMを実行します。比較的安価に入手できるカメラを利用することで、お手軽にSLAMを適用することができます。また、カメラで取得した画像から物体認識をするなど、SLAM以外の応用もできます。
Depth SLAM
Depth SLAMはデプスカメラ、ToFセンサーなどで取得した深度画像からSLAMを実行します。Visual SLAMの苦手とする特徴点が少ない環境や暗所の環境でもSLAMを適用することができます。
ユースケース
SLAMの実用例というと「ロボット掃除機」を思い浮かべる方も多いかもしれませんが、その他にも「自動運転車」「ドローン」「AGV(自動搬送車)」「VR/AR/MR」など、様々な用途で活用されています。
自動運転車
ロボット掃除機
ドローン
AGV(無人搬送車)
VR / AR / MR
マクニカの提供するSLAM
マクニカでは高性能なSLAMのライセンスを提供をしています。オープンソースのSLAMと比較して機能性・信頼性の高いSLAMとして、商用に利用して頂くことができます。また、定期的な品質確認やアップデート、さらにトラブル時の技術サポートも合わせて提供します。
|
マクニカの提供するSLAM |
オープンソースのSLAM |
|
|
用途 |
商用 |
研究 |
|
OS対応 |
〇 |
△ |
|
プロセッサ対応 |
〇 |
× |
|
センサー対応 |
〇 |
△ |
|
地図管理 |
〇 |
△ |
|
ライセンス |
〇 |
△ |
|
品質 |
〇 |
× |
|
技術サポート |
あり |
なし |
業務プロセス
お客様のご要求に合わせて、SLAMの要件定義から実環境での実装までサポートいたします。
要件定義
環境条件や要求仕様をヒアリングの上、必要機能の洗い出しや要件定義を行います
センサー・ホスト選定
ご予算や精度を考慮し、アプリケーションに最適なセンサーやホストを選定します
実証実験
実環境でSLAMを評価して課題の抽出、改善を支援します(実地サポート)
実装
最終的な実環境でのSLAMの実装支援や運用での技術サポートを行います
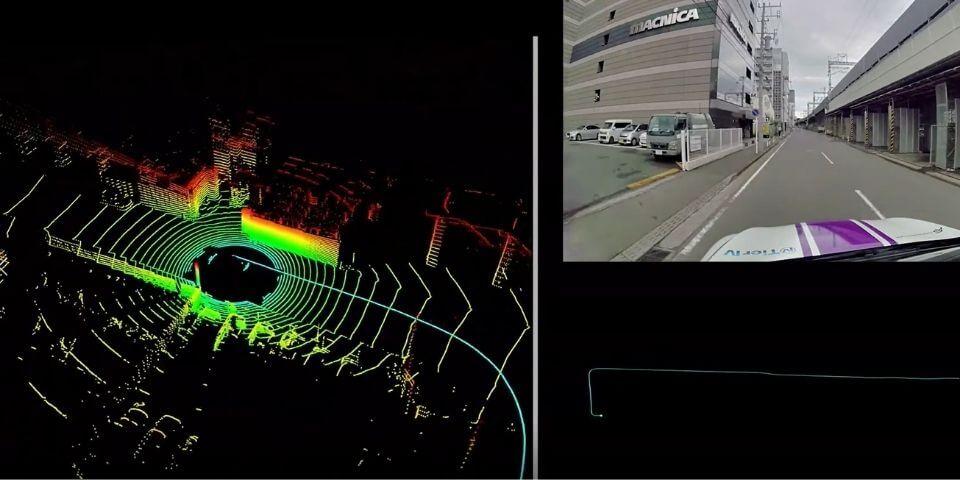
デモンストレーション
LiDARやステレオカメラ、ToFセンサーなど、様々なセンサーでSLAMのデモンストレーション実演を行っています。オフィスにお伺いした各種カメラでの実演のほか、当社所有の自動車でのLiDAR SLAM実演などを実施することも可能ですので、お気軽にお問い合わせ下さい。
お問い合わせ
SLAM活用サービスに関するご質問やご不明点などございましたら、こちらよりお気軽にお問い合わせ下さい。