- スマートシティ/モビリティ事業 HOME
- ユースケースで探す
-
製品・サービスで探す

- イベント・
セミナー -
事例・コラム
- お問い合わせ

自動運転には、人間でいう「眼」の役割として、さまざまなセンサーが用いられている。その中でもLiDAR(ライダー)と呼ばれるセンサーが自動運転においても最も重要だと考えられている。本コラムでは、LiDAR の構成や性能といった基本から、最新機能や車載要件まで紹介する。
LiDARと自動運転
自動運転に用いられるセンサー群
自動運転には、さまざまなセンサーが用いられる。ADAS(Advanced Driver Assistance System/先進運転支援システム)が普及して久しいが、まず採用されたのは前方レーダーである。その後、ステレオカメラや周辺監視レーダー、そしてAIを活用した前方カメラなど、今日ではさまざまなセンサーが実用化されている。LiDARは、それら多種多様なセンサーがあるにもかかわらず、自動運転のキーとなるセンサーだと言われている。それは、物体認識と自己位置推定という自動運転において重要な機能を実現するために欠かせないと考えられているからである。
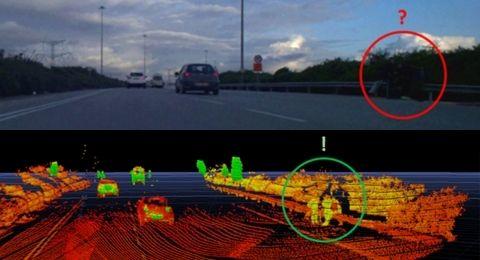
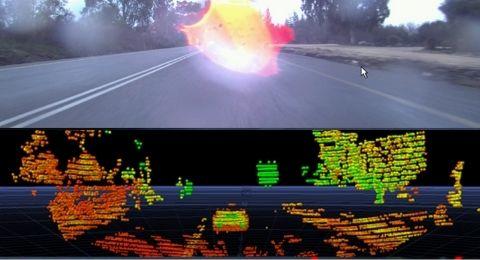
物体認識では、カメラと画像認識の発展が目覚ましく、特にディープラーニングを活用した画像認識は革命的に技術を発展させたと言って過言ではない。しかしそのカメラ+画像認識でも、物体の正確な距離は測定できない。また、カメラは照度が低いと黒く潰れてしまい、物体検出に支障が出る。一方LiDAR は、物体の距離を測定できるため、より正確な障害物回避を行うことができる。また、自分でレーザーを発射するため、暗くてもはっきり見える。さらに、カメラはレンズやウインドウに付着した水滴などに影響されやすいが、LiDARではレーザー光が完全に遮断されない限り影響は少ない。
次に自己位置推定について、自動運転ではリアルタイムに自分がどこにいるかを正確に把握しなければ、正しい経路を辿ることは不可能である。自己位置推定の方法には、GPS(Global Positioning System)信号を利用したり、タイヤの回転数を利用したりといくつかの方法があるが、例えばGPS信号はビルの谷間で反射波によりエラーが大きくなったり、山間部やトンネルでGPS信号が得られないなど、この方式単独での自己位置推定は実用的ではない。また、タイヤの回転数で移動量を計算する方法は、スタート位置を入力する必要があり、タイヤのスリップなどで誤差が蓄積していくなど、実用的ではない。一方、LiDARによる自己位置推定は、高詳細マップとLiDARで取得した地図を比較することによって、自己位置を精密に推定することができる。
このようなことから、LiDARはまさに自動運転の核となるセンサーであると言える。
LiDARの基本
LiDARとは
LiDAR とは、Light Detection And Ranging の略で、レーザー光を使ったリモートセンシング技術によって、物体の検知や対象物までの距離の計測を行っている。照射したレーザー光が物体に当たって跳ね返ってくるまでの時間を計測し、物体までの距離や方向を測定する。また、光束密度が高く、短い波長のレーザー光を用いるため、高い精度で位置情報や物体の形状などを検出できる。
自動運転においては、機械の「眼」の役割として採用が進んでいる他、最近では、測量やAR(拡張現実)、セキュリティなどの分野でも活用が加速している。
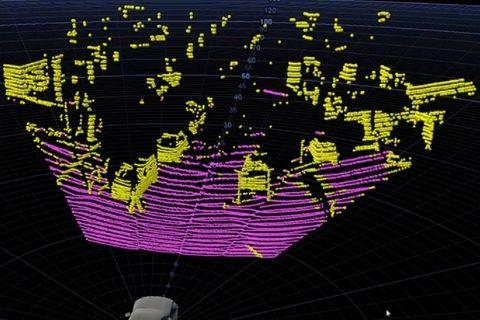
点群
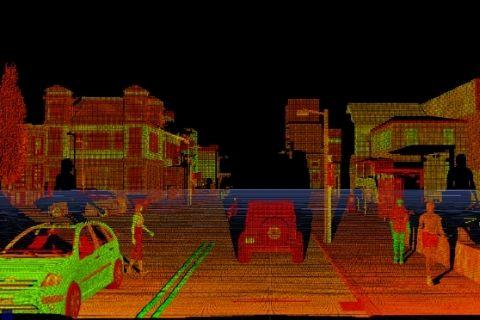
LiDARで得られる情報は、点群(point cloud)と呼ばれる。まさに点の集まりである。ビューアで見ると、カメラの画像のようにも見えるが、実は一つ一つの点で表されている。LiDARは物体の検知と測位を行っていると述べたが、これら一つ一つの点は、その測位によって得られた座標データに基づいてビューアで表示しているので、例えば上面視や側面視など、視点を変えることができる。また、座標情報から距離別の色分け、高さ別の色分けなども可能である。さらに、多くのLiDARが反射率の情報も載せているので、反射率別に点群を色分けすることもできる。例えば、アスファルトと道路の白線の反射率は異なるため、レーン検知や右左折レーンの矢印も検知することが可能である。
回転型とソリッドステート型
LiDARの種類は、いろいろな分類があるが、もっとも分かりやすいのが回転型か非回転型かである。回転型は、メカ式とも呼ばれ、レーザーを多数搭載したモジュールを回転させる方式である。非回転型は、ソリッドステート型とも呼ばれ、上述のようなレーザー自体を回転させるのではなく、ビームステアリングによって走査(スキャン)を行う方式である。回転式は、車両のルーフの高い位置に取り付ければ1台で360°見渡せる優れた方式だが、乗用車の意匠に適してない。また、回転する部分の振動や衝撃に対する耐久性が低く、量産には適していないと言われている。このような理由から、ソリッドステート式のLiDARを各社が競って開発しているのである。


LiDARの構成要素と性能指標
レーザー素子と受光素子
LiDARのレーザーは、近赤外線が用いられる。波長は905nmや1550nmといった波長が一般的である。前者はシリコン半導体レーザー、後者は化合物半導体レーザーを用いるのが一般的である。シリコン半導体の方が価格や消費電力といった部分で有利であるが、1550nm帯の方が網膜に与える影響が少ないので、出力を上げやすい。また、太陽光に含まれるこの波長帯の出力が他の波長帯よりも相対的に低いので、太陽光による影響を受けにくい。
受光素子は、フォトダイオード、SPAD(Single Photon Avalanche Diode)などが用いられるが、やはり905nm帯がシリコン半導体で製作できるため、安価で低消費電力である。
ビームステアリング方式
ビームステアリング、すなわちレーザー光のスキャン方式は各社でさまざまである。例えば、2D MEMS(Micro Electro Mechanical Systems)タイプは2軸可動素子にミラーを搭載し、これにレーザー光を反射させることによりラスタースキャンを実現するものである。その他、小型ミラーを回転させるタイプ、波長を変えたレーザー光をプリズムに入射し、屈折によってスキャンを実現するタイプなど、各社独自方式が多い。
回転型は、複数のレーザーを搭載したヘッドを回転させることにより、水平方向に270°や360°といった広い視野角が得られるのが特長である。一般的には垂直方向に可動部分は持たず、複数のレーザーをどのように搭載するかにより解像度と視野角が決まる。例えば、32個のレーザーを1°ずつずらして配置すれば、垂直視野角は31°になり、中心付近のレーザーを密に配置して、上下の部分は疎に配置することにより、遠方の物体を見やすくするという製品も多い。
一方、数年前より回転型ではないソリッドステートタイプの製品が多数登場している。中でもシリコンMEMSミラーは、半導体の微細加工技術によって集積化された微小電気機械システムである。2D MEMSと呼ばれる2軸可動の素子にミラーを搭載し、これにレーザー光を反射させることによりラスタースキャンを実現するのが、いわゆるMEMS LiDARである。MEMSは永久磁石と電磁石で稼働させるため、摩擦のない高速かつ高精度のビームステアリングが可能である。
測距方式
測距方式はパルスTOF(Time of Flight)方式が一般的である。FMCW(Frequency Modulated Continuous Wave)方式もいくつかのメーカが採用しようとしているが、まだ開発中の技術と言えるだろう。パルスTOF方式は、レーザーを一定間隔で発射して、その反射波が届くまでの時間を測定することによって距離を計算する方式である。一方、FMCW方式は、レーダーで一般的に用いられている方式で、周波数を変調させながら連続的に照射し続け、その反射波が届くまでの時間を測定することによって距離を計算する方式である。TOFとの大きな違いは、ドップラー効果による反射波の波長変化を計測することにより、対象物との相対速度も計算できることにある。
信号処理プロセッサ
信号処理には、単純な計算を高速に処理するFPGA(Field-Programmable Gate Array)が適している。しかし、汎用的なFPGAはスペックが過不足あり、性能を重視すると、ややもすると上位モデルを使わなければならず、サイズやコスト、消費電力の面で必ずしも最適解とは言えない場合が多い。そこで、専用ASIC(Application Specific Integrated Circuit)を起こし、サイズや消費電力を低減しつつ、最大限性能を引き出せるようにしているメーカーもある。今後の小型化・高性能化には、おそらくキーになるだろう。
しかし、さらに将来、LiDARの方式や信号処理方式が一般化していき、LiDARが普及していくと各プロセッサメーカーによるパッケージICが出てくると思われる。これにより、現在のレーダーのようにMMIC(Monolithic Microwave Integrated Circuit)とMPU(Micro-Processing Unit)を一体化し、誰でもレーダーが作れてしまうようになり、さらなる小型化・低コスト化が進むと思われる。そんな時代も案外近いかもしれない。
検知距離
最大検知距離は、文字通りどれくらいの距離の物体が見えるかということで、物体検知には非常に重要な性能である。もう少し技術的に言うと、LiDARが発射したレーザー光が物体に反射して、それを受光部で捉えることができる最大距離ということになる。つまり、レーザー光強度、物体の反射率、周囲のノイズ、受光部の感度、信号処理性能といったところが性能に影響する。
最大検知距離を延ばすには、レーザーの出力を増すのが手っ取り早いが、人間の眼に対する影響を抑制するためIEC 60825-1 Class1レベルのアイセーフ求められる。また、デバイスの発熱の問題から、レーザー出力は制限される。受光部の感度を上げれば当然最大検知距離も延びるが、ノイズも拾いやすくなる。そのため、むしろ受光部前の光学系で反射光以外を除く工夫や信号処理部でのノイズフィルタリングが性能の差となるだろう。
最大検知距離だけでなく、最小検知距離も重要である。例えば、車両のグリルにLiDARを取り付けた場合、車両の周辺を監視するにはできるだけ最小検知距離が小さい方がよい。しかし、最大検知距離と最小検知距離を両立させるのは難しく、ダイナミックにレンジを切り替えるなどA/D変換、信号処理での工夫が必要になる。
視野角(FOV)
視野角は、FOV(Field of View)とも言われ、文字通りどれくらいの範囲を見渡せるかというものである。回転型は、複数のレーザを搭載したヘッドを回転させることにより広い視野角が得られるのが特長である。これに対しソリッドステート型は、ビームステアリングに限界があるため、視野角が狭いのが一般的である。しかし、複数のMEMS を搭載するなど、今日では120°前後の広い視野角を実現している。
垂直方向の視野角は、回転型ではレーザーの本数、ソリッドステート型では水平視野角と同様ビームステアリングできる角度であるが、どちらもおおよそ20°~40°が一般的である。車載用途ではこれくらいで十分と考えられるが、高い位置に取り付けるセキュリティや建設機械の周辺監視用途では、もっと広い垂直視野角が喜ばれるだろう。
フレームレート/周期
フレームレートは、カメラ画像同様fps(frame per second)で表され、1秒間に何フレーム更新するかを示している。また、周期[Hz]で表す方法もあるが、どちらも意味は同じである。最近のLiDARでは、10~30fpsが一般的であるが、高速道路など高速移動を考慮すると30fps程度は必須だろう。
レーザーの発射タイミングやスキャンレートを変更することにより、可変フレームレートを採用するメーカも増えている。回転型のLiDARでは、角速度を変更することによってフレームレートを変更ことができるが、回転物の重量によって速度に限界がある。また、遠心力も大きくなるため、重量バランスがシビアになる。一方、MEMS方式や回転ミラー方式は、回転型に比してフレームレートを上げやすいが、フレームレートを上げるということは処理速度も上げないといけないので、用途に応じたバランスが必要である。
解像度/分解能
解像度も重要な性能の一つである。例えば、デジタルカメラでは画素数が高い方が高画質というのは皆さんもご存知だろう。LiDARにおいても、解像度が高い方がより物体を緻密に捉えることができる。解像度の表し方は、垂直解像度で表すことが多い。これは、もともと回転型LiDARが市場に広まっており、縦に並べるレーザー数がそのまま垂直解像度であり、16から128チャンネル(またはポイント)と呼んで、そのままモデル名にもなっているからである。しかし、ソリッドステートタイプのLiDARでは、水平解像度も重要である。また、解像度は高いほうがより高精細になるが、1 秒間に処理できる能力が決まっているので、FOVやフレームレートとトレードオフの関係にある。
分解能も、性能を表す指標としてよく使われている。なぜなら、視野角の中央を密、端の方を疎にしているようなLiDARもあり、単純に解像度だけでは物体検知のしやすさを判断できないが、分解能では、点群の密度として比較しやすく、ある距離の物体が検知できるかを計算するのに便利だからである。また、分解能は、解像度x[本]、視野角α[deg]とすると、次式で表される。
分解能 = α ÷ (x -1)
例えば、解像度が均等に101本、視野角が20°であれば、分解能は0.2°である。より遠く、より小さい物体を検知しようと思うと、分解能が細かい方が有利である。
LiDARの最新技術
可変FOV(垂直視野変更)
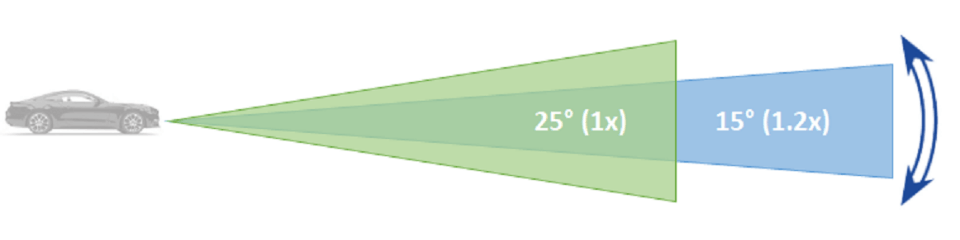
MEMS方式やプリズム方式のLiDARは、ダイナミックに垂直視野を変更できる。これには二通りの使い方が考えられる。一つ目は、視野角を狭くして、その分レーザー出力を上げる方法である。これにより、検知距離を延ばすことができる。二つ目は、解像度を変えず視野角を狭くして、分解能を上げる方法である。これにより、より遠方の小さな物体を検知することができる。どちらも、一般道では広く、高速道路では狭く遠くを見やすくするというようなニーズに対応するものである。また、狭めた視野を上下に移動することも可能なので、坂道の山頂部や谷底部で視野を下向きにするといいたことも可能である。
ROI
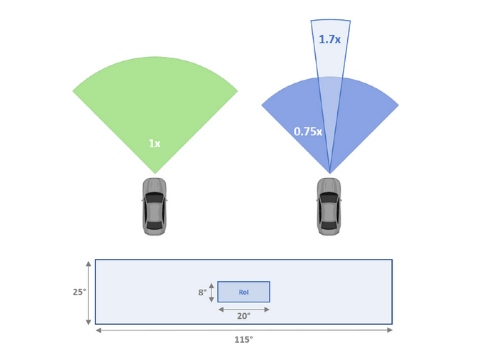
ROI(Region of Interest)、つまり関心領域とは、視野内の指定した範囲のレーザー出力を上げて、その部分の検知距離を延ばしたり、分解能を細かくして物体検知性能を上げたりするものである。上記の垂直視野変更も広義にはROIであり、手法も同じである。あえてROIとして紹介する理由は、例えば、あるメーカーのLiDARでは、通常の視野角のレーザー出力を75%、ROI部分(視野中央の20°× 8°の領域)のレーザー出力を170%にすることにより、通常の視野角でも点群データを得ながら、ROIの部分はより検知距離を延ばすことができる。さらにこの領域は、4つのMEMSそれぞれ別々で設定可能なので、例えばカーブに応じて領域を変更したり。ダイナミックに変更することが可能である。そして、これを可能にしているのが、正確なビームステアリングとレーザー出力調整である。
ピクセル加算
これは、複数ピクセルをグループ化し、あたかも1つのピクセルかのように取り扱い、より弱い信号を捉えやすくする手法である。遠方や反射率の小さい物体は、反射波の強度が小さく、ノイズに埋もれてしまう。しかし、複数ピクセルの反射信号を加算することによって、S/N比を上げることができる。そのため、遠方にある物体や反射率の小さい物体も検出できるようになる。しかも、これは指定したピクセルグループの計算を追加するだけなので、通常の視野角・解像度の点群データはそのままで、追加でピクセル加算の結果を出力できる。ただし、ピクセル加算によって得た点群データは、解像度と距離精度は落ちる。また、データ帯域やプロセッサの負荷は上がるので、それを考慮した設計が必要である。
干渉防止
太陽光や他のLiDARから発射された波長の近いレーザーは、ノイズの原因になる。しかし近年は、各メーカーとも干渉対策を実装している。手法はいろいろあるが、自分が発射したレーザーの反射光のみ受光するようにフォトダイオードに入る光の角度を反射方向に限定したり、レーザー光をパターン化し、そのパターンの反射光のみ受光するといったことも行われれている。
ブロッケージ
LiDARのレーザー発射口および反射光の受光部であるフロントガラスに異物が付着した状態をブロッケージと言う。このような状態になった場合に、異物が付着した部分は正常に検知できなくなってしまうため、上位ECUへ異常をレポートする必要がある。システムがワイパーや高圧エアなど異物除去装置を持っている場合は、これを作動させる。自動運転レベル3以下であれば、異常時にはドライバーに運転を引き継ぐことができるが、レベル4以上になるとシステム側が運転し続ける必要があるため、異物除去装置は不可欠だろう。
コンピュータビジョン
前述の通り、自動運転車両において、LiDARは物体認識や自己位置推定に用いられる。LiDARの出力する点群情報は、そのままでも1点1点が座標データを持っているが、自動運転に用いるには点の集合としてその物体が何なのか、知覚的処理が必要になる。今回、代表的な例を用いて機能を解説する。
LiDARベースの知覚ソフトの代表的な機能は、3種類に分類することができる。それは、物体認識、走行可能領域判別、そして地上ランドマーク出力である。
物体認識
物体認識機能は、実際には、物体の認識・識別・追跡・予測といった処理を行うパッケージである。まず、シングルフレームで物体の種類を識別する単体検出と、マルチフレームで動きの方向、速度などを計算する移動検出である。さらにこの2つの検出器の情報を組み合わせ、追跡・予測を行っている。識別は、乗用車、大型車、バイク、自転車、人、その他などに識別される。これらの情報を物体の一意のIDと紐づけて上位ECUへ送信する。
走行可能領域
自動運転レベル4以上になると、ドライバーではなくシステムが運行を担うため、走行可能な領域や駐車可能な領域を認識する必要がある。ソフトウェアによって処理は異なるが、あるソフトウェアでは、フレームごとに、点群のひとつひとつのポイントを、衝突可能性あり、衝突無関係の2つのクラスに分類する。また、衝突可能性ありに分類された点群は、物体と障害物に分けられる。衝突無関係に分類された点群は、平坦な地面、乗り越えても問題にならない高さの物体、物体の下を通っても問題にならない物体、点群ノイズが含まれる。これらの情報も、物体認識と同様、上位ECUに送信される。さらには、白線などレーンマーキング情報の追加、IMUなどのセンサーと組み合わせて、自車の動きを補正する機能の実装も予定されている。
ランドマークの検出・追跡
すでに述べている通り、自動運転車両であれば、地図上のどこを走っているのか、正確に知覚する自己位置推定が必須である。地図とのマッチングには、NDT(Normal Distribution Transform)マッチングなどの技術が用いられる。これは、地図上の特徴的なランドマークと走行しながら得られるLiDAR情報のランドマークを合わせながら自車の位置を推定するものである。このように、電柱などの垂直な物体、ガードレールなどの水平な物体、橋や標識など大きな平面といった、特徴的なランドマークを検出・追跡するのがこの機能である。これらの情報も、上位ECUへ送信される。
このようにして、上位ECUに対して、運行領域に存在する物体、走行可能領域、ランドマークなどの情報が供される。これによって、自動運転に必要となる障害物回避や経路生成といった機能を実現するのである。
キャリブレーション
量産車への適用を考えると、キャリブレーション機能も必要になる。まず、工場やディーラーなどサービスセンターで使用する出荷前キャリブレーションである。これは、指定位置に置かれたターゲットを検出し、センサーの取付け位置を自動的に原点を補正する機能である。また、走行中も積載状態、サスペンション、タイヤの空気圧などの変化で、車高や傾きはダイナミックに変化する。これらをダイナミックに補正する機能である。
センサーフュージョンでは、車両の座標系からお互いの座標系の差分を補正する必要があり、より精度の高いセンサーフュージョンには、こうしたリアルタイムキャリブレーションが必須となるだろう。
LiDARの課題
サイズ・質量・コスト
LiDARは、比類なき性能を持つものの、レーダーやカメラに比べ、まだまだサイズ、質量、コストで劣っている。LiDARは、構成部品が多いため致し方ないが、販売数量の増加によってある程度まではコストダウンされていくだろう。その先は、 LiDARに最適化したレーザーアレイや受光部・信号処理部一体化など、部品の進化で小型・軽量・低コストが進むと思われる。
信頼性・品質
各社とも、国際規格ベースで信頼性試験を実施し、対応を進めているが、日本のカーメーカーの信頼性評価スペックは、今までの経験を生かしたノウハウの集大成となっており、国際規格よりも厳しい条件・判定基準になっていることが多い。試験をパスするには設計時から考慮に入れておくべきものも多いので、代表的な信頼性スペックについて簡単に述べておきたい。
車室外への取付けを考慮すると、動作温度範囲は-40℃~85℃、筐体の防護レベル・防水性はIP69Kレベルが求められる。加えて、カーメーカーごとに独自の高圧洗浄試験仕様があるため、注意が必要である。振動試験については、一定の周波数での振動試験よりも、カーメーカー指定波形のランダム加振試験のほうが問題になりやすい。また、衝撃試験も100Gクラスの試験もあるので、注意が必要である。温度・湿度では、高温高湿やサーマルショックが厳しいが、試験条件、判定基準がまちまちなので、設計へ織り込みが難しい。EMI/EMCについては、上記のフィジカルな試験よりは国際規格に準じているものが多いので、比較的考慮しやすい。品質ドキュメント類については、日本と海外の習慣はやや異なるため、相互理解が不可欠である。
その他、機能安全や環境負荷物質対応など、量産自動車への採用にはいくつものハードルがあるが、この数年で対応できるメーカーとそうでないメーカーで選別されていくだろう。
機能安全
機能安全については、規格を十分理解することも重要だが、カーメーカーとシステムサプライヤーと一緒にセーフティゴールを決める必要があるが、ASILランクに関してはセンサー系はASIL B(D)でよいと思われる。部品選定や設計時の参考にされたい。
まとめ
LiDAR単体でカメラの代替はほぼ可能である。しかしそれは、LiDARのみで自動運転可能と言いたい訳ではなく、カメラの冗長センサーとしての活用も十分可能であるということであ。カメラが正しく検知できない時に同じ方式のセンサーだと同じエラーが発生してしまう可能性が高い。そこで、LiDARやレーダーなどの違う方式のセンサーで検知することによって、検知漏れや誤検出・誤認識といったことを防ぐことができる。このような複数のセンサを組み合わせることをセンサフュージョンと呼ぶが、自動運転車両にはまさにこれが必要不可欠だろう。
LiDARは、近年性能や信頼性が向上し,いよいよ車両に搭載可能なレベルになってきた。また、建機・農機・鉄道・船舶・航空など、他のモビリティにも自動化や安全といったキーワードで、LiDAR のニーズが非常に高い。そして、交差点・踏切・ホームドアなど、セキュリティやスマートシティといった業界にもLiDARが使われ始めている。このように、LiDAR は市場規模が2025年に数千億円になるとも見込まれており、ますます用途が広がっていくだろう。いったん搭載が始まると、携帯電話のカメラのように、小型化や高性能化、そして低コスト化が進み、“搭載されているのが当然”というものになっていくだろう。
ともあれ、このような新技術で社会課題を解決していければと考える。
お問い合わせ
当社マクニカでは、LiDARに関する様々な製品やサービスを提供しています。LiDARに関するご質問やご要求などございましたら、以下よりお気軽にお問い合わせ下さい。