- スマートシティ/モビリティ事業 HOME
- ユースケースで探す
-
製品・サービスで探す

- イベント・
セミナー -
事例・コラム
- お問い合わせ
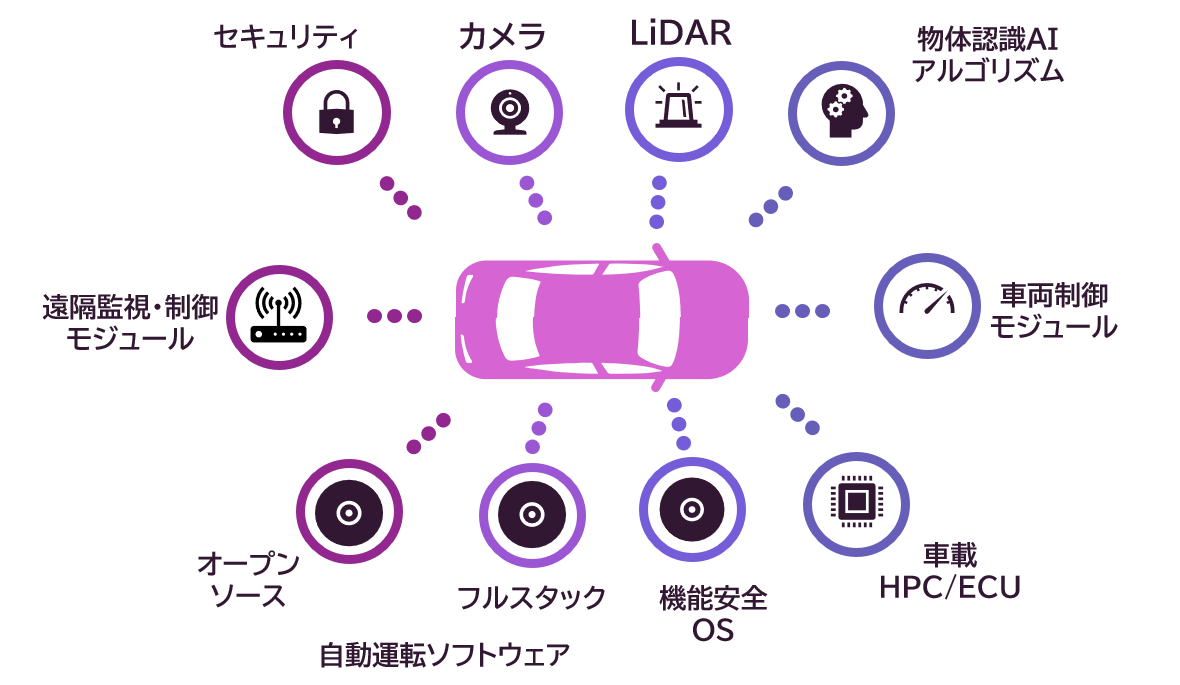
車載開発向けソリューション
自動運転車両の開発には多くの最新技術と様々な専門性が必要です。自己位置の認識や周辺環境の理解の為の最先端のセンサーと認識系アルゴリズム、適切な状況判断と車両に指示を出す自動運転ソフトウェア。また、ソフトウェアの指示のもと確実に車両を制御する為の制御システムが必要です。更にソフトウェアの増加に伴い、セキュリティに関する要求も大きくなります。その為、開発向けの車両構築や自動運転を構成する要素技術の開発、自動運転車両の運用と活用では多くのサプライヤーやプレイヤーと密接に連携する必要があります。マクニカでは、車両の構築支援、適切な自動運転ソフトウェアとハードウェアの選定や実装、FMS開発の支援など、マクニカのエコシステムを活用しながら、お客様の様々な開発を支援します。
センサーコンサルテーション
自動運転車両は、自車位置と自車の周辺の状況を正しく認識する為に、カメラやLiDARなど数多くのセンサーが必要です。
| 用途 | R&D |
グリーンスロモビリティ |
私有地内 | 公道 | 公道(高速) |
| LiDAR台数 | 1-2 | 3-4 | 2-4 | 5 | 7 |
| カメラ台数 | 1-2 | 1-2 | 3-4 | 5-8 | 5-8 |
| GNSS/IMU | 1 | 1 | 1 | 1 | 1 |
1.上記は運転設計領域によるセンサー構成例です。
2.LiDARは設置場所等に応じライン数やFOVなど異なります。
3.カメラは用途により画素数,FOV,レンジ等が異なります。
自律走行車両構築
自動運転機能を有する車両は、まだほとんど販売されていないため入手が非常に困難です。一方、自動運転車両や関連技術の開発、自動運転車両を活用したサービス開発や社会実装の検討には多くの自動運転車両が必要となります。
高性能コンピューティングシステム
自動運転車両は周辺環境の認識、状況判断、車両の制御のため、多くのセンサーを有し、カメラ画像やLIDARセンサーの点群データによる物体認識、環境認識などの大量のデータ処理を短時間で行い、あらかじめ設定されたルールに則り車両制御、危険回避、経路生成などの処理と判断を瞬時に行う必要があるため、高性能なコンピューティングシステムが必要です。マクニカでは、NVIDIA社のDriveシリーズを始めとした開発キットやECUベンダーとの連携強化により量産品質に対応するコンピューティングシステムを提供します。
次世代車載向けリアルタイムOS
自動車の高機能化に伴い、車両に搭載されるソフトウェアの重要性が増加しています。特にミッション・クリティカル・システムの代表例でもある自動車には、より高い信頼性や、高い可用性を支えるリアルタイムOSが必要です。また統合ECUなどにより、クリティカルレベルが異なる複数のアプリケーションを一つのECUで実行することが可能になりますが高いセーフティレベルの実現の為のハイパーバイザーも提供します。マクニカはBlackBerry/QNX社の代理店として、開発ライセンスや量産ライセンスの提供を行っています。
自動運転ソフトウェア実装支援
現在では国内海外を問わず、数多くの自動運転ソフトウェアが開発されています。設計思想や使用用途により採用されているアルゴリズムや機能安全のレベルなど様々です。また、オープンソース、フルスタックソフトウェア、低速走行やオフロードに特化したものなど、それぞれに特徴があります。
| 自動運転SW | Autoware | ADENUE | Oxbotica | Navya | MOPI |
| 特徴 | オープンソースソフトウェア | フルスタックソフトウェア | ユニバーサルな自動運転ソフトウェア | シャトルサービスやトラクター向け | 低速車両向け |
FMS(Fleet Management System)による車両管理
自動運転車両の活用には、運行管理システム(Fleet Management System)が必要です。現在の法律では、セーフティドライバーの乗車が必要ですが、将来の自動運転車両によるサービスを考慮すると、一人のオペレータによる複数車輛の監視、車両の問題発生時の車両情報のフィードバックと遠隔からの車両制御など、リアルタイムで車両そのものの状態や車室内をモニタリングするシステムや遠隔操作、走行ルートの指示や複数車輛の連携などリアルタイムで管理をするシステムの構築が必要です。マクニカでは、独自の通信プロトコルを有し、低遅延で車両情報をクラウドに上げる車載向けエッジ端末やそれぞれの車両情報・車両状況をリアルタイムで可視化できるようデータプラットフォームを開発しており、幅広いユーザー様にご活用いただいております。

コミッショニング
実証実験には、実施場所により監督官庁への許可申請や交通事業者様との連携など綿密な計画が必要となります。
お問い合わせ
車載開発に関するご相談などございましたら、こちらよりお気軽にお問い合わせ下さい。