- スマートシティ/モビリティ事業 HOME
- ユースケースで探す
-
製品・サービスで探す

- イベント・
セミナー -
事例・コラム
- お問い合わせ
自律走行の技術は日々進化し、より現実なものになりつつある中で、多くのプレイヤーが独自の自動運転ソフトウェア開発に、多大な時間とリソースを投入しています。一方、Autoware Foundationは異なるアプローチをとり、完全なオープンソースとして自律走行のソフトウェアスタックを構築し、Foundationのメンバーが貢献し、迅速な開発を可能にしています。
本コラムでは、マクニカがAutoware を使用したタイでのPoCプロジェクトに、複数の自動運転車両を導入した事例を紹介します。
Autowareとは?
-
自律走行は、一般的に3つの主要コンポーネントから構成されます。
-
センサー
LiDAR、レーダー、2D/3D カメラ、GNSS、IMU、INSなどセンサーは、車両の❝目❞になるものです。 -
自律走行ソフトウェアスタック
Autowareなどの自律走行ソフトウェアスタックは、上記のセンサーからのデータをリアルタイムで処理し、車両の位置、周囲の障害物、現在のルートなどの重要な情報を抽出します。パイプラインの最後には、現在の状況に応じた最適なアクションが決定されます。車両の頭脳と言えます。 -
ドライブ・バイ・ワイヤ・システム
ソフトウェアの判断を物理的な動作、ブレーキを踏む、ハンドルを切る、ギヤを変える、方向指示器を点灯するなどに、変換するシステムです。この最後のコンポーネントが車の手にあたります。

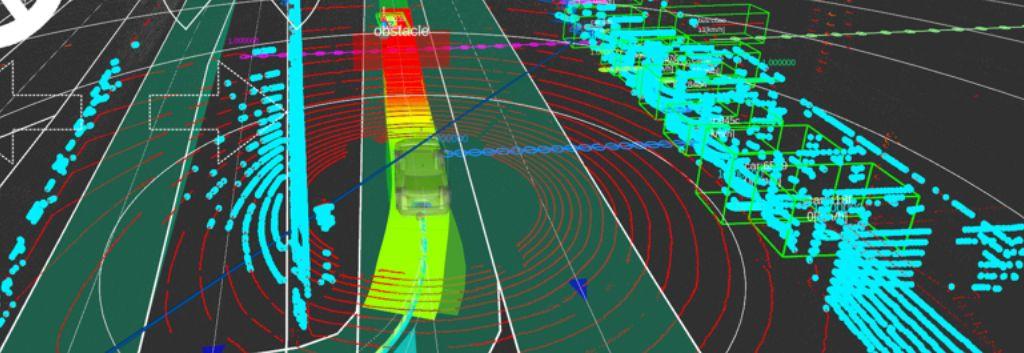
図1:Autowareが認識している周辺状況
From Autoware Foundation, distributed under Apache 2.0 LICENSE
- Autowareは、「プラットフォームに依存しない」ことを目指しています。つまりAutowareはどのような車両にも搭載でき、どのようなセンサーキットやドライブ・バイ・ワイヤ・システムとも組み合わせる事が可能です。このような柔軟性を実現するために、Autoware自体多くのモジュールで構成されており、ユーザーはユースケースに応じて、使用するモジュールやアルゴリズムを選択することができます。
- Autowareの処理パイプライン
- センサーの生データは、まずセンシングモジュールによって処理されます。この段階で、データの同期、解析、フォーマット化、補正、結合が行われます。その後、データは、ローカライゼーション・モジュールとパーセプション・モジュールで処理されます。
- ローカライゼーション・モジュールは、IMUデータ、GNSS測位、3D点群マッチングなど、すべてのローカライゼーション情報を融合して車両位置を算出します。並行して、パーセプション・モジュールは、AIとヒューリスティックベースのアルゴリズムの両方を使用して、シーン内の障害物を検出し追跡します。位置情報と検出データを元にプランニング・モジュールが、車両の最適な挙動と軌道を計算します。車両は交通ルールを守り、危険な状況を回避するだけでなく、車線変更や静止している障害物の回避など、様々なシナリオに対応します。
- 最後に、コントロール・モジュールが、Autowareの高度な判断(減速、左折など)をドライブ・バイ・ワイヤ・システムへのコマンドに変換します。
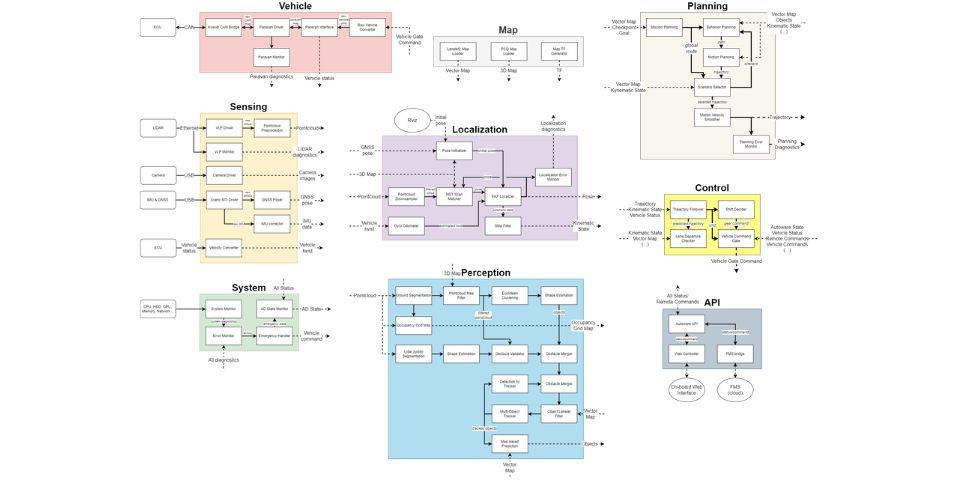
図2:Autoware モジュラーアーキテクチャ
※クリックで拡大(別ウィンドウ)
車両インテグレーションの一例
マクニカが今回タイで行ったPoCのプロジェクトでは、BYD社製のEV車両に、下記のセンサーとドライブ・バイ・ワイヤ・システムを実装しました。

図3:デモ車両(source:Gensurv)
-
車体上部のVelodyne製VLP-32C LiDARセンサーは、非常に正確な点群データを提供し、障害物検出とローカライズ(3Dマップマッチングアルゴリズム)の両方に使用します。また、Xsens Mti-680G INS モジュールは、ジャイロスコープ、加速度計、地磁気センサー、GNSS受信機など多くのセンサーを搭載しており、このモジュールは主に、ローカライズに使用されます。このようなシンプルなセンサー構成でも、Autowareは問題なく制限速度(<30km/h)での自律走行ができるのです。今回使用したドライブ・バイ・ワイヤ・システムは、サードパーティ―により、製作・実装されています。このシステムは、車両内の専用CANネットワークを通じて、ペダルとステアリングの制御を行います。ギヤや方向指示器のなどの制御は、車両搭載のCANネットワークを通じて制御することができます。
Autoware用のPC、電気配線、予備バッテリー等のコンポーネントは、車両のトランクに収容しています。 -
Autowareは、プラットフォームに依存しないため、この様なカスタマイズされたセットアップ、センサーキット、ドライブ・バイ・ワイヤ・システムを容易に統合することができます。

図4:BYD車両のトランクとルーフトップ
HDマップと3Dマップ
自律走行の信頼性と一貫性を高めるために、AutowareはHDマップと3Dマップの両方を活用します。
HDマップ
HDマップ(またはベクターマップ)は、交通ルールと走行可能な車線に焦点を当てた地図情報です。車線、道路標識、信号機、制限速度、横断歩道、駐車場など、出発前に把握し、完璧な状態で出発できるため、車両の走行エリアは限定されますが、HDマップを使うことで、多くのプロセッシングリソースを節約することができます。 HDマップは通常、専用のツールを使い手作業で作成されます。
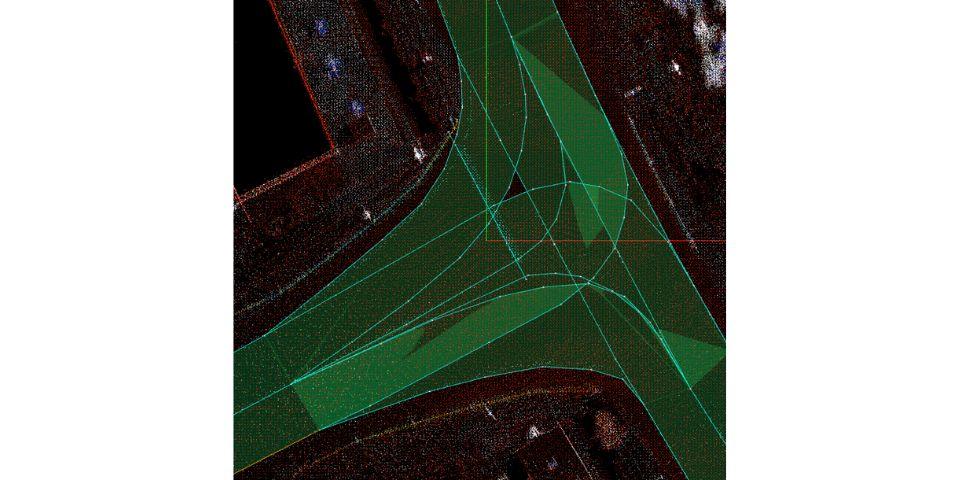
図5:HDマップ上の交差点
3Dマップ
3Dマップは、物体の静的なオブジェクトを描いた3D点群です。道路、木、建物など、全て3Dマップに表示されます。しかし、3Dマップを使うということは、車両の自律性がマップ上の範囲に限定されることを意味します。しかし、この地図はAutowareに非常に有益な情報を提供します。
まず、3DマップとLiDARセンサーの点群データをマッチングさせることで、センチメートル単位の正確な自車位置を算出することができます。次に、木やフェンス、電柱などシーン内の静的なオブジェクトと関連する障害物を区別するために、3Dマップが使用されます。3Dマップは通常、地図ベンダーの提供するMMSシステムやSLAMなどで作成します。
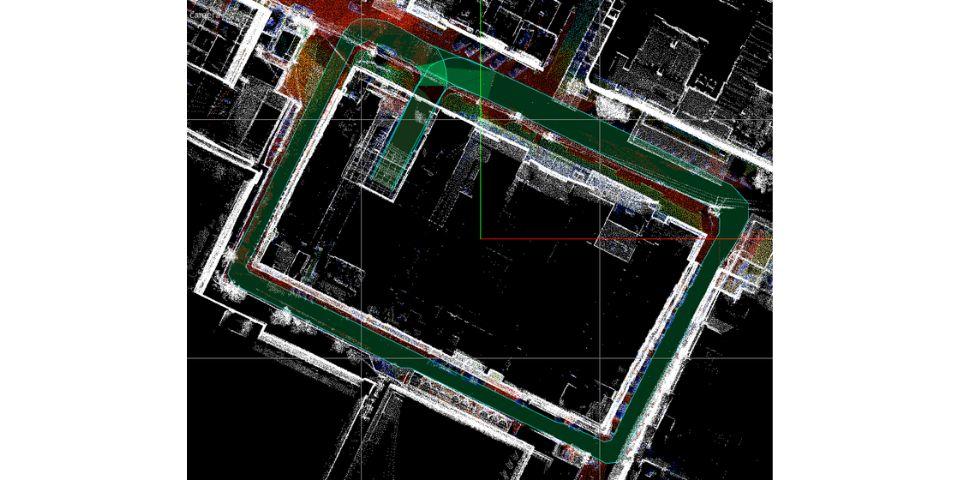
図6:3Dマップ上に描かれたHDマップ
オンサイトへの展開
車両とHDマップ、3Dマップの準備が整ったところで、いよいよ車両を現地に投入しました。バンコクの東に位置するEECIの敷地内の5kmのコースを自立走行させ、PoCデモを行いました。前方車両に速度を合わせる、路肩に停車している車両を避ける、交差点で他の車両を優先するなど様々な状況に、Autowareが自律的に対応しました。このような場所で、難しい状況もありましたが、道路上での挙動を完璧にするための修正と調整をすぐに行うことができるのが、オープンソースの利点です。
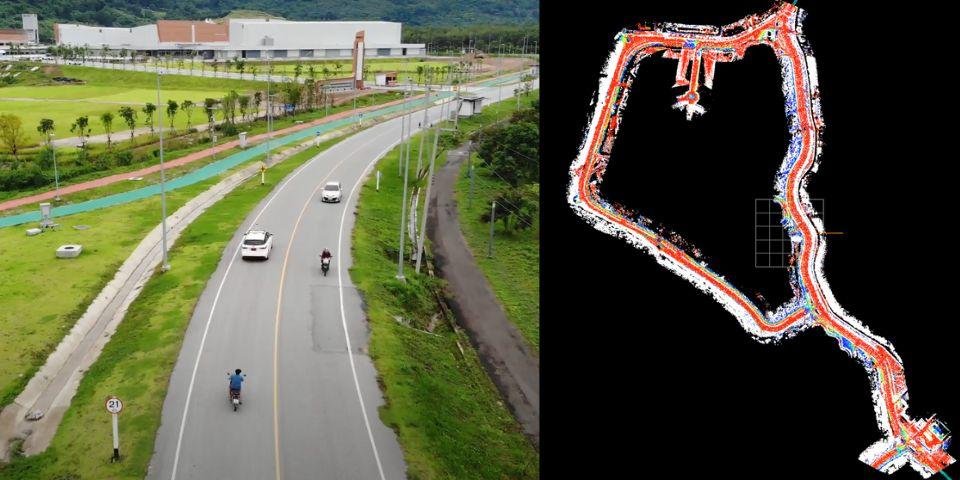
図7:EECIサイトでの5Kmに及ぶテストトラック(左図ソース:Gensurv)
問い合わせ
本件に関連するお問い合わせなどございましたら、以下よりお問い合せ下さい。