- スマートシティ/モビリティ事業 HOME
- ユースケースで探す
-
製品・サービスで探す

- イベント・
セミナー -
事例・コラム
- お問い合わせ
前回は、人や動体の侵入を検知する侵入検知システムの方式と構築について
3D-LiDAR 侵入検知システムが簡単に構築できることをご覧いただきました。
今回は、これにLEDやブザーなど、警報機能を追加してみましょう。
デモシステムの構成
LiDAR:ソリッドステート式LiDAR(360°LiDARへの置き換えも可能)
PC:Linux PC(ubuntu18.04)侵入検知を行うソフトを動作
マイコンボード:ブザー、LED制御
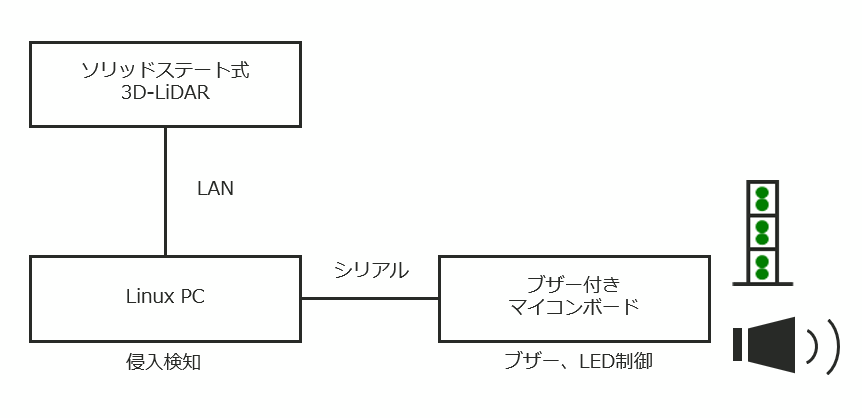
図1:侵入検知デモ構成イメージ
今回は、遠方までの侵入検知をするために、360°の回転式LiDARではなく、画角が60°のソリッドステートタイプのLiDARを用いましたが、利用シーンに合わせて、様々な種類のLiDARを使用可能です。
図1に示す構成の様に、3D-LiDARから得られたデータをLinux PCで点群処理し、人と車両の識別と侵入検知、検知フラグの出力までを行います。
検出フラグを受けたマイコンボードで、フラグに合わせてLEDの点灯とブザー出力をします。
デモシステムの実際の動作状況
まずは、以下の動画をご覧ください。
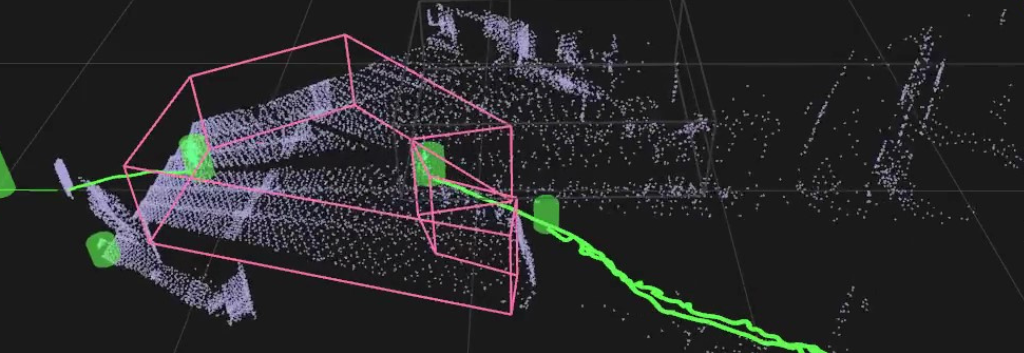
この動画デモの最初の場面では、ピンク枠で囲った検知エリアに何もない状態からスタートしています。
途中で物体(人)の侵入があった場合に、LEDを青3段から赤2段に切り替えており、全ての物体がエリアから出ると青3段になっていることが分かります。

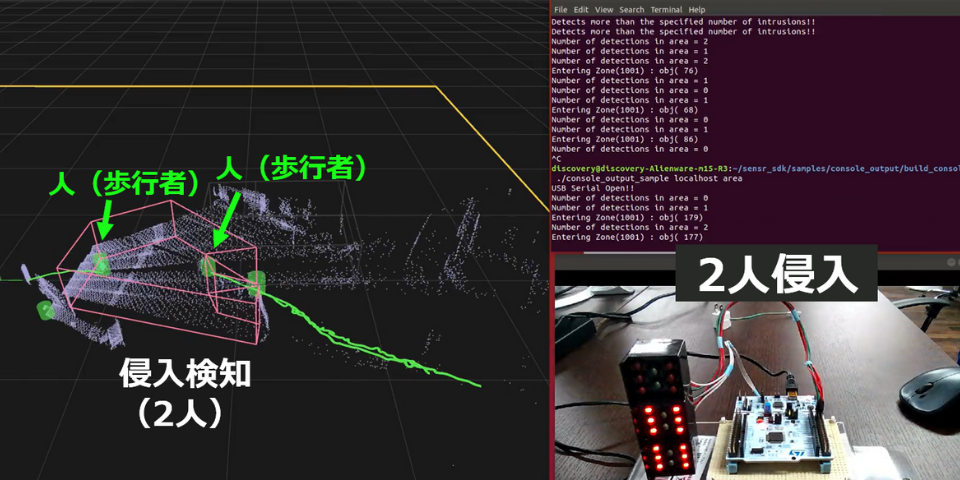
図2:侵入前(左)、侵入後(右)
また、動画デモの中では、複雑な多角形で区切られているエリアで、物体の侵入を判定しています。
今回使用したツールでは検知エリアを複数設定でき、更に非検知エリアも設定が可能で、それにより動き続けているが侵入物体として検知したくないロボットアームや風になびく木々などを検知対象から常に除外することも可能となります。
動画デモの中では、ピンク枠の検知エリア右上にグレイ枠の非検知エリアを設定しています。
途中で車が非検知エリアに侵入していますが、非検知エリア侵入前は車両として追跡を行っています。
非検知エリア侵入後には、追跡を中止していることが分かります。
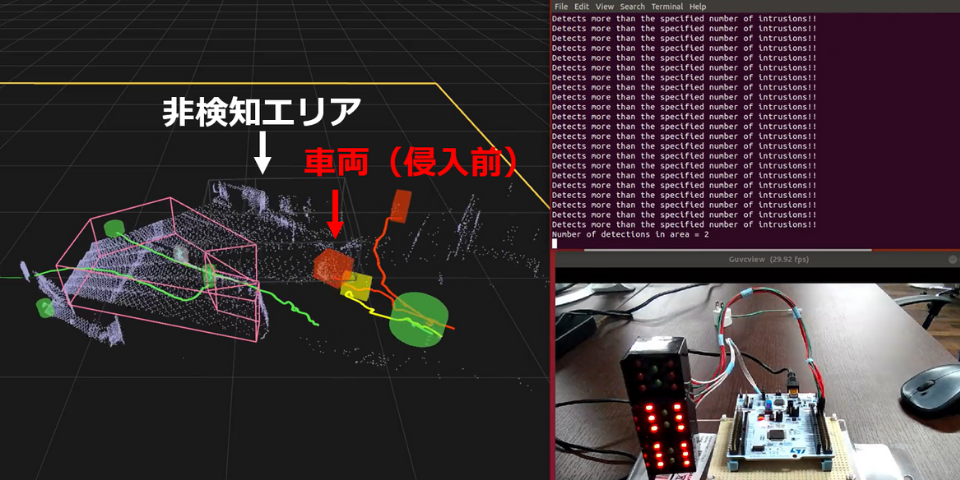
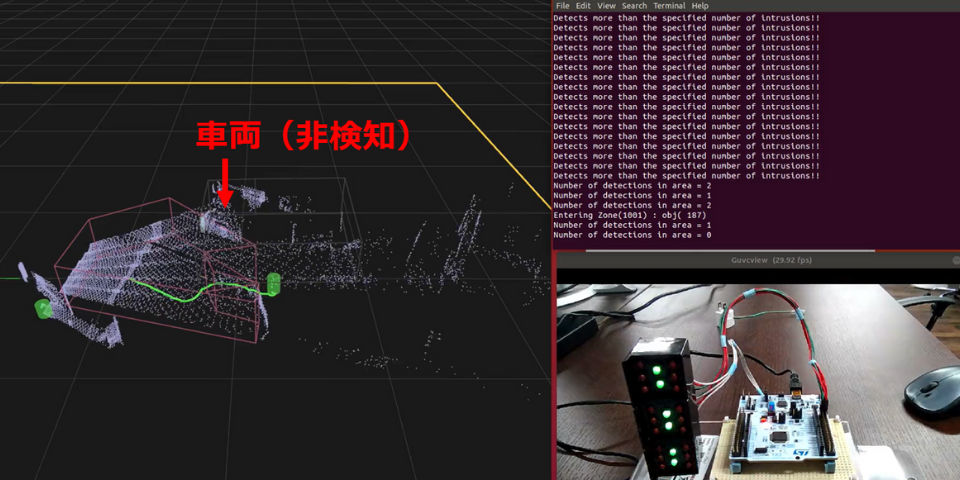
図3:非検知エリアへの車両侵入直前(左)、侵入後(右)の様子
監視したいエリアは使用箇所によって様々異なりますが、今回使用しているツールを用いると、3次元の点群情報からレイアウトを把握し、工場内の通路部分のみや、交差点の横断歩道部分のみといった、自由な検知エリアの設置が可能となります。
システム構築や認識アルゴリズム開発
今回、3D-LiDAR侵入検知システムの応用方法についてイメージして頂けるよう、ブザーやLEDを追加してみました。
また、動体が検出される状況、それを人や車両で識別している状況、検知エリアと非検知エリアでの検知/非検知状況を動画の中で紹介しています。
実際の状況を見て頂くことにより、具体的にイメージして頂けたのであれば幸いです。
マクニカでは、こうした応用へのコンサルティングや、認識アルゴリズムの開発支援も行っております。
お問い合わせ
本記事の内容に関してのご質問、またはLiDAR等のセンサー選定にお困りのことがありましたら、以下からお問い合わせください。