- スマートシティ/モビリティ事業 HOME
- ユースケースで探す
-
製品・サービスで探す

- イベント・
セミナー -
事例・コラム
- お問い合わせ
活用されるシーン
地域交通や観光地、施設内など、運行条件や目的に応じて自動運転の導入が進んでいます。

地域公共交通
住宅地や中心市街地を結ぶ生活路線として、運転手不足や路線維持の課題に対応。

観光地・エリア内回遊
観光地やリゾート施設周辺において、二次交通や回遊性の向上を支える移動手段として活用。

私有地内の移動
大学・病院・工場などのクローズドなエリアで安定した運行と安全性を確保。
シーンや条件に合わせて、最適な運行設計を一緒に検討します。
現場の条件や課題に応じて、最適な導入方法をご提案します
自動運転バスについて相談する導入に関わる全工程を一貫支援
自動運転EVバスの導入では、車両の選定だけでなく、運行条件や制度、安全体制など、複数の観点を整理する必要があります。マクニカでは、必要な対応を導入初期から伴走して対応します。

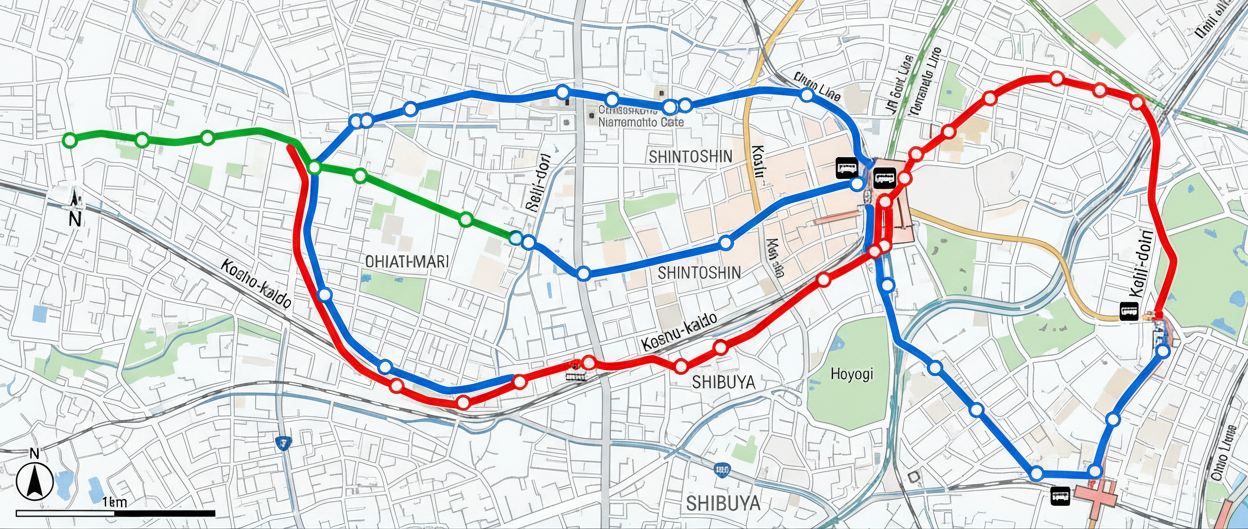
運行条件の確認・整理
走行エリア(公道/私道)、運行形態(定時/オンデマンド)など、実現可能な運行条件を整理。

補助金や制度・関係者調整
補助金の活用や関係省庁、地域関係者との調整を支援。

安定運行のためのシステム設計
安定運行を前提としたシステム構成や運行設計を構築。

運行管理・安全管理体制の構築
遠隔監視や運行管理、安全管理体制を含めた運用設計を支援。

運行を支える車両・システム構成
Navya Mobility社の自動運転EVバス「EVO」をベースに、車両・運行管理を含めたサービス全体を提供します。

車両とセンサー
EVOは、LiDAR・カメラ・GNSSなどを組み合わせ、周辺環境を認識しながら自動走行を行います。乗客の安全確保や停止制御など、運用を前提とした機能を備えています。

オペレーション全体
自動運転EVバスは、車両単体ではなく、運行計画・監視・安全管理を含めたオペレーションとして成立します。現場対応とシステムを組み合わせ、安定した運行を実現します。
遠隔運行管理システム
車両の位置情報や運行状況をリアルタイムで把握し、遠隔からの監視・対応を行います。異常時の対応や運行状況の可視化により、安全性と運用性を担保します。
段階的な拡大検討
実証から開始し、運行条件やエリアを整理しながら、段階的に本格導入へと移行します。小さく始めて検証しながら拡張できる構成を前提としています。
自動運転EVバス「EVO」
主要仕様
Navya Mobility社 EVO
複数のセンサーを組み合わせた自動運転システムを搭載し、実証から運用まで幅広い環境での導入に対応します。

導入プロセス
自動運転EVバスの導入は、車両の導入だけでは完結しません。運行設計、安全管理、制度対応などを段階的に整理しながら進めることで、実装へとつながります。
実現可能性や制度面を整理し、導入の方向性を明確化。

課題整理
現在の課題を整理し、自動運転で解決できるポイントを明確にします。

適用領域検討(公道/構内)
走行環境や利用シーンを踏まえ、最適な適用領域を検討します。

導入プロセス設計
実証から本格導入までの進め方を整理し、無理のない導入計画を描きます。
制度・補助金整理
関係省庁や制度の確認、補助金活用の可能性について整理します。
安全性と運用性を確認しながら、実装モデルを構築。

システム設計
車両・通信・運行管理を含めた全体構成を設計します。

安全評価
走行環境やリスクを踏まえ、安全な運行条件を確認します。
運用フロー構築
日々の運行・監視・対応まで含めた運用の流れを設計します。

関係者調整
自治体・施設・関係事業者との役割分担や運用体制を整えます。
運行を開始し、データをもとに改善を重ねていきます。

運行体制構築
現場運用と遠隔監視を組み合わせた運行体制を構築します。

システム統合
既存の運行管理やインフラと連携し、安定した運用環境を整えます。

効果検証
運行データをもとに、安全性や効率性を検証します。

継続的な改善
運用状況に応じて改善を重ね、本格導入へとつなげていきます。


