- 半導体事業HOME
- マクニカの製品・サービス
-
技術情報

-
イベント・セミナー
- 取扱メーカー
- サポート
- お問い合わせ
- 製品購入はこちら
- 半導体事業のメルマガ登録
![]()
![]() 条件を指定して絞り込む
条件を指定して絞り込む
現在2191件がヒットしています。check
ダンピング抵抗については、このコラムでも 2回にわたって述べました。ダンピング抵抗の値を決めるには、
(1) ボードの特性インピーダンス
(2) ドライバの駆動能力
(3) オーバーシュートをどの程度見込むか
この 3点が必要です。
(1) のボードの特性インピーダンスについては、『ボードの特性インピーダンスの決め方』を参照してください。(2) のドライバの駆動能力と (3) のオーバーシュートについては、互いに関連がありますが、オーバーシュートに着目するなら 10 ~ 20 % に選べば特に問題はありません。決められなければ 10 % とすればよいでしょう。
オーバーシュート自体はあまり重要な問題ではないのですが、大きくなるとクロストークが増えたり、波形の重なりによって思わぬノイズ源になったりするので、10 ~ 20 % 程度に収めたほうが無難です。それよりも、オーバーシュートが大きくなると、図1 に示すように、その跳ね返りが生じます。この跳ね返りが最も重要なのです。
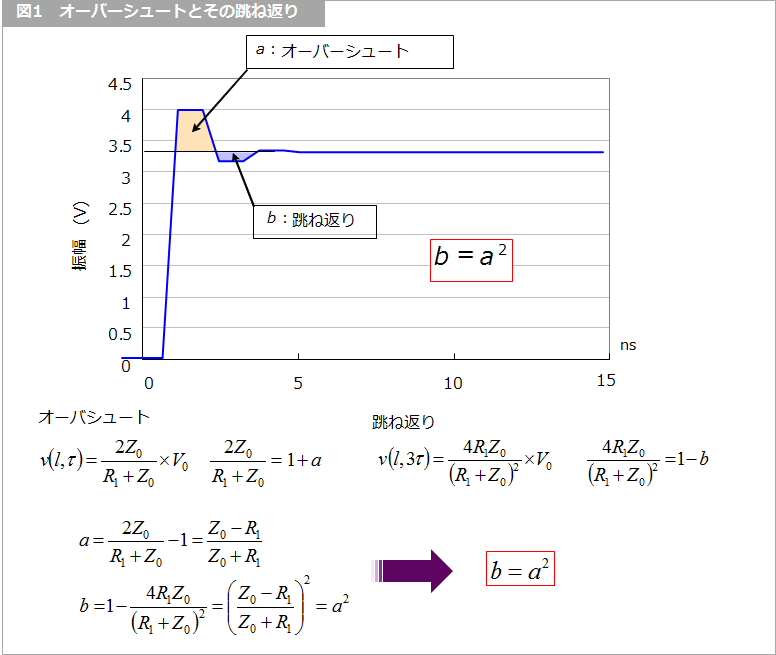
ところで、オーバーシュート量とその跳ね返り量とは、図1 に示すように 2乗の関係があることはご存じでしょうか。オーバーシュートが 20 %、すわなち 0.2 なら、跳ね返りは 0.2 の 2乗で 0.04、すなわち 4 % になります。 オーバーシュートが 10 % なら跳ね返りは 1 % です。先ほど述べた 10 % のオーバーシュートとは、跳ね返りが 1 % とほとんど無視できるレベルなのです。
特性インピーダンスが 50 Ω の通常のボードで、駆動能力の大きい 24 mA ドライバを用いると、オーバーシュートは 64 % で、跳ね返りはその 2乗なので 41 % になり、ノイズマージンを超えてしまいます。12 mA ドライバなら、オーバーシュートが 38 % で跳ね返りは 15 % となって、かなり危ない領域に入ってきます。 ダンピング抵抗を挿入するのは、実はこの跳ね返り量を少なくする対策です。
オーバーシュート量を求めるには、ドライバの出力抵抗を知る必要があります。デバイスのデータシートを見ても、出力抵抗の値は記載されていません。これは、TTL (Transistor-Transistor-Logic) 時代の規格で、出力電流に対して出力電圧を決めるという名残りなのです。
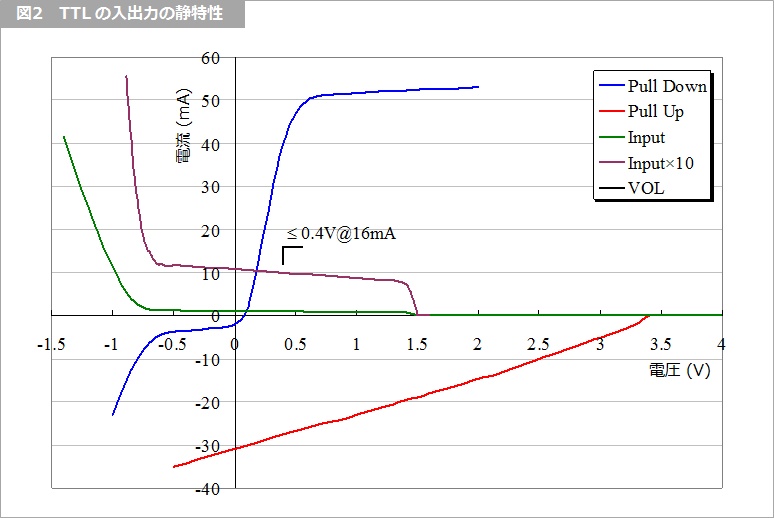
図2 は TTL の入出力の静特性です。電流は、出力に流れ込む向きを正としています。TTL の Low 側の入力電流は、-1.6 mA です。少しややこしいのですが、負号はデバイスから流れ出ることを意味します。図2 は前段の出力と次段の入力とが接続された例なので、入力電流は正、すなわち、入力から流れ出て、前段の出力に流れ込むことを意味します。Low 側の出力の規定は負荷を 10個、すなわち、16 mA 流し込んだ状態で、0.4 V 以下です。
式で表すと、
VOL ≦ 0.4 V@IOL = 16 mA
となります(脚注1) 。
CMOS はご存じのように、入力電流はほぼゼロです。したがって、
VOL ≦ 0.4 V@IOL = 16 mA
という規定は、あまり意味がないことがお分かりだと思います。
TTL と CMOS とが混在していた時代はこの規格に意味がありましたが、CMOS だけの世界ではそろそろ別の規定、すなわち、出力抵抗で規定してもいいのではないかと考えます。とはいっても、ほとんどのドライバの駆動能力は出力電流で規定されているので、これを出力抵抗に換算する必要があります。この方法は、このコラムの『特性インピーダンスとドライバの駆動能力』で述べました。 これで、ダンピング抵抗を決めるための 3つの要素についてはご理解いただいたと思います。そして、ダンピング抵抗の決め方は『ダンピング抵抗の値ってどのように決めるの?』で述べました。
ここでは、もう少し簡単にダンピング抵抗の値を決める方法をご紹介します。検結果から先に述べると、図3 はオーバーシュート量が 10 % の場合、図4 はオーバーシュート量が 20 % の場合のそれぞれダンピング抵抗を決めるチャートです。
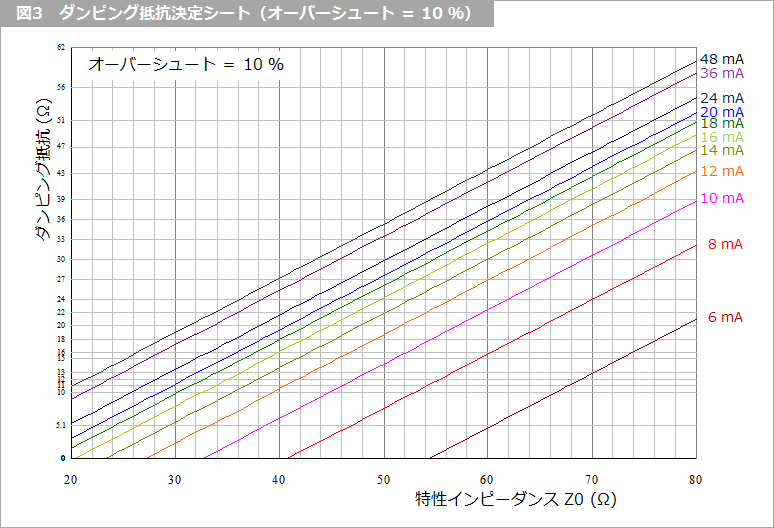
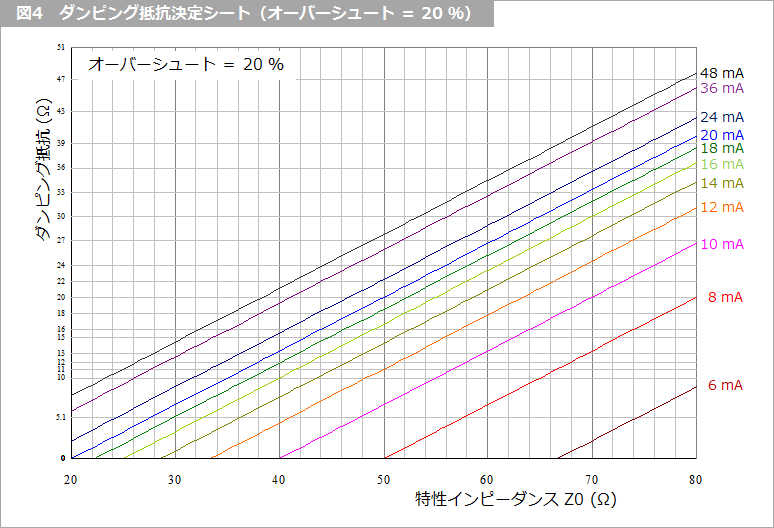
図3 について説明すると、ドライバの駆動能力を選択し、横軸の特性インピーダンスとの交点の抵抗値がダンピング抵抗値です。例えば 12 mA ドライバで特性インピーダンスが 60 Ω とすると、ダンピング抵抗値は 27 Ω となります。オーバーシュート量が 20 % の図4 では、同じ条件でダンピング抵抗値は 18 Ω となります。抵抗値は、E24 系列で選んであります。
興味のある方にこのチャートの作り方を紹介いたします。
図1 のオーバーシュートの式
2 × Zo ÷ (R1 + Zo) = 1 + a
から、R1 を求めると、
R1 = (1 - a) ÷ (1 + a) × Zo
となります。
例えば、a = 0.1 とすると、
R1 = 0.9 ÷ 1.1 × Zo
となります。そして、ドライバの駆動能力を Io とすると、出力抵抗は
0.4 V ÷ (Io × 1.5)
となります(脚注2)。
この出力抵抗とダンピング抵抗との和が R1 になるようにダンピング抵抗の値を決めます。すなわち、ダンピング抵抗値は、
(1 - a) ÷ (1 + a) × Zo - 0.4 V ÷ (Io × 1.5)
となって、Io をパラメータとした直線になります。
Zo = 50 Ω、駆動能力を 12 mA とすると、
0.9 ÷ 1.1 × 50 - 0.4 V ÷ (12 mA × 1.5) = 18.7 Ω
となって、図3 で求めた値と同じになることがお分かりいただけると思います。
このようにして、あらかじめダンピング抵抗の値を求めておけば、とりあえずゼロオーム抵抗を入れて、あとから実験でダンピング抵抗を求めるという作業が必要なくなります。是非、このチャートを活用してみてください。
脚注1
TTL 時代には、ドライバに接続出来る負荷の数が標準では 10個でした。 ファン・アウト(f/o:fan-out)が 10 という言い方をしました。入力にもファン・イン(f/i:fan-in)という定義があり、通常の TTL が 1 で、高速 TTL(74H シリーズ)やショットキー TTL(74S シリーズ)は f/o が 12.5、f/i が 1.25 でした。 標準 TTL に高速 TTL は 8個しか接続できません。 逆に、高速 TTL には標準 TTL は 12個まで接続できるという規定です。他にも、多くの異なるシリーズ、例えば、低電力ショットキー TTL(74LS シリーズ)は、f/o が 5 で f/i は 0.25 などがありました。ショットキー TTL のシリーズは、VOL の規定が 0.5 V と変則で、異種のシリーズを接続する際には注意が必要でした。
現在の CMOS はこのようなことを考えなくてよいので、楽ですね。
脚注2
『特性インピーダンスとドライバの駆動能力』で述べたように、例えば、12 mA ドライバの出力抵抗 R1 は、
0.4 V ÷ (12 mA ×1.5) = 22 Ω
でした。
一般的に、駆動能力 Io (mA) のドライバの出力抵抗は、
0.4 V ÷ (Io × 1.5
となります。
碓井有三のスペシャリストコラムとは?
基礎の基礎といったレベルから入って、いまさら聞けないようなテーマや初心者向けのテーマ、さらには少し高級なレベルまでを含め、できる限り分かりやすく噛み砕いて述べている連載コラムです。
もしかしたら、他にも気になるテーマがあるかも知れませんよ!