- Smart City/Mobility Business HOME
- Search by use case
-
Search by product/service

- event·
seminar -
Case studies and columns
- Inquiry
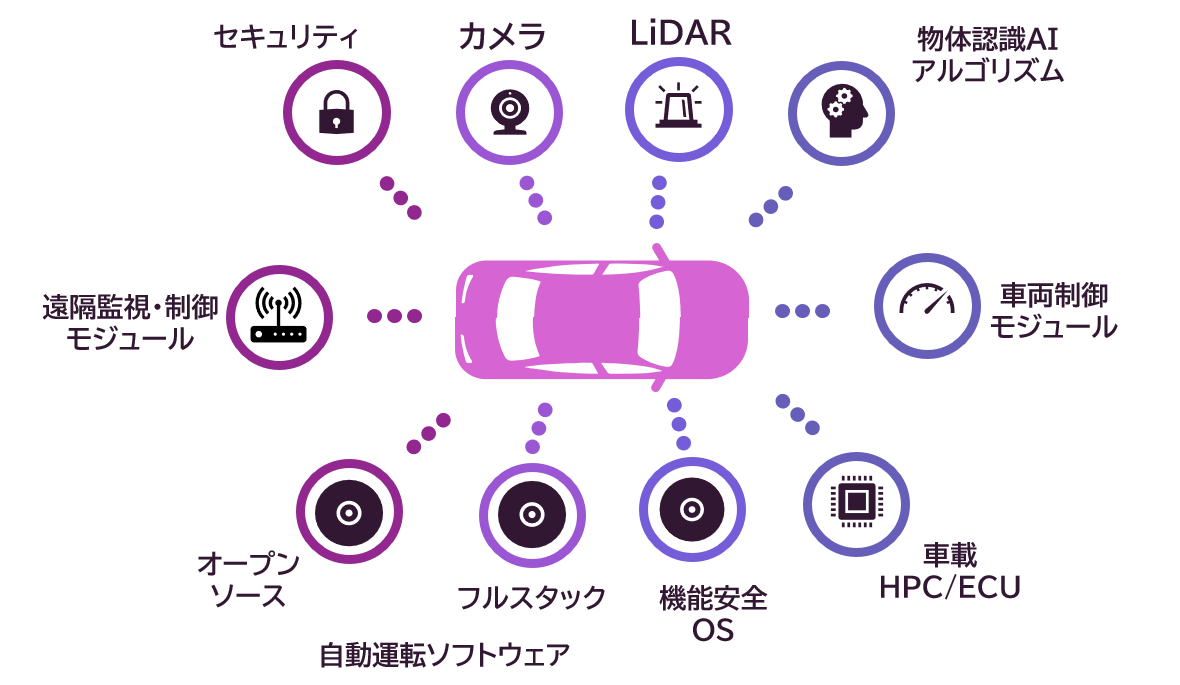
Solutions for in-vehicle development
The development of autonomous driving vehicles requires many cutting-edge technologies and various expertise. Cutting-edge sensors and recognition algorithms for recognizing the vehicle's position and understanding the surrounding environment, autonomous driving software for appropriate situational judgment and issuing instructions to the vehicle. In addition, a control system is required to reliably control the vehicle under the instructions of the software. Furthermore, as the amount of software increases, security requirements also increase. For this reason, it is necessary to work closely with many suppliers and players in the construction of vehicles for development, the development of elemental technologies that constitute autonomous driving autonomous driving vehicles. At Macnica, we support our customers' various developments by utilizing our ecosystem, such as supporting the construction of vehicles, selecting and implementing appropriate Macnica autonomous driving software and hardware, and supporting FMS development.
sensor consultation
Self-autonomous driving vehicles require a large number of sensors such as cameras and LiDAR in order to correctly recognize the position of the vehicle and its surroundings.
| Usage | R&D |
green slow mobility |
on private property | public road | Public road (high speed) |
| Number of LiDARs | 1-2 | 3-4 | 2-4 | 5 | 7 |
| Number of cameras | 1-2 | 1-2 | 3-4 | 5-8 | 5-8 |
| GNSS/IMU | 1 | 1 | 1 | 1 | 1 |
1. The above is an example of sensor configuration in the operation design area.
2. The number of lines and FOV of LiDAR differ depending on the installation location.
3. The number of pixels, FOV, range, etc. of the camera differ depending on the application.
Autonomous vehicle construction
Vehicles with autonomous driving functions are very difficult to obtain because they are still rarely sold. On the other hand, many autonomous driving vehicles are required for the development of autonomous driving vehicles and related technologies, the development of services utilizing autonomous driving vehicles, and the consideration of social implementation.
high performance computing system
autonomous driving vehicles have many sensors to recognize the surrounding environment, judge the situation, and control the vehicle, and can process large amounts of data such as object recognition and environment recognition using camera images and point cloud data from LIDAR sensors in a short time. A high-performance computing system is required because it is necessary to instantly perform processing and judgments such as vehicle control, danger avoidance, route generation, etc. according to preset rules. Macnica provides computing systems that support mass production quality through development kits such as NVIDIA 's Drive series and by strengthening collaboration with ECU vendors.
Next-generation automotive real-time OS
As automobiles become more sophisticated, the importance of software installed in vehicles is increasing. In particular, automobiles, which are a prime example of mission-critical systems, require a real-time OS that supports higher reliability and high availability. In addition, integrated ECUs make it possible to run multiple applications with different criticality levels on a single ECU, and we also provide hypervisors to achieve a high level of safety. Macnica is an agent for BlackBerry/QNX, and provides development and mass production licenses.
autonomous driving software implementation support
Currently, a large number of autonomous driving software is being developed both in Japan and overseas. There are various algorithms and levels of functional safety that are adopted depending on the design concept and usage. And each has its own characteristics: open source, full-stack software, low-speed and off-road specific.
| autonomous driving software | Autoware | ADENUE | Oxbotica | Navya | MOPI |
| feature | open source software | full stack software | Universal autonomous driving software | For shuttle services and tractors | for low speed vehicles |
Vehicle management by FMS (Fleet Management System)
To utilize autonomous driving vehicles, a fleet management system is required. Current laws require a safety driver to be on board, but in consideration of future autonomous driving vehicle services, a single operator can monitor multiple vehicles, provide feedback on vehicle information in the event of a vehicle problem, and remotely control the vehicle. It is necessary to build a system that monitors the condition of the vehicle itself and the interior of the vehicle in real time, and a system that manages real-time management such as remote control, driving route instructions, and coordination of multiple vehicles. At Macnica, we have developed an in-vehicle edge terminal that has a unique communication protocol and can upload vehicle information to the cloud with low latency, and a data platform that allows visualization of each vehicle's information and vehicle status in real time. We are using it.

Commissioning
Depending on the location of the demonstration experiment, it is necessary to make a detailed plan, such as applying for permission to the regulatory authority and coordinating with transportation operators.
Inquiry
If you have any questions regarding in-vehicle development, please feel free to contact us.