- Semiconductor BusinessHOME
- Products and Services of Macnica,Inc.
-
technical information

-
Events and Seminars
- Handling Manufacturer
- Support
- Inquiry
- Click here to purchase products
- Semiconductor business e-mail magazine registration
![]()
![]() Narrow down by specifying conditions
Narrow down by specifying conditions
現在2156件がヒットしています。check

Previous article: Episode 1:Macnica Cup to be held?!
Deciding on the concept ~ Aim for a Japanese Maradona ~
First, there were several missions assigned to Kuro-chan when creating the soccer robot.
① Control the main unit from the controller via wireless communication.
② The SOC uses PSoC (Infineon 's microcontroller).
③Perform a series of actions such as dribbling, passing, and shooting.
④ Perform some kind of feedback operation (LED, audio, action, etc.) in response to controller input.
It is no exaggeration to say that determining the concept is the most important part of creating a robot.
In order to create the strongest soccer robot that meets these specifications, Kuro-chan's sense will be tested here.
What is the strongest soccer robot that can't be defeated by anyone? !
What is important is the mechanism for hitting the strongest shot? Or is it a horsepower that can't be beat?
No, that's nonsense! !
The strongest soccer robot that can't be beaten is the same as the strongest soccer player of all time!
Kuro-chan decided to create Maradona, the strongest dribbler of all time!
We set out to create a soccer robot with the concept of ``overwhelming agility and operability'' in order to recreate Maradona's five-man hit.
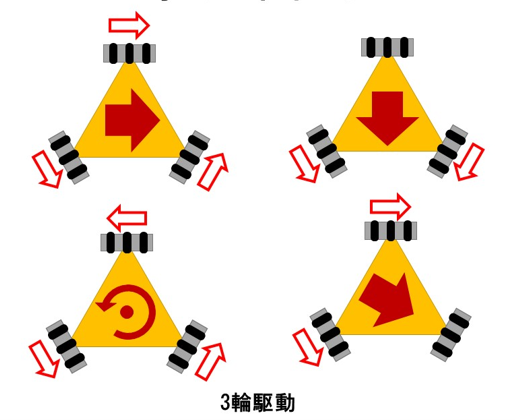
First of all, this omni wheel was adopted as the core wheel of the soccer robot to achieve overwhelming agility!

Best of all, these wheels have small tires attached vertically, allowing the robot to move forward, backward, left, right, and diagonally, as well as rotate the body.
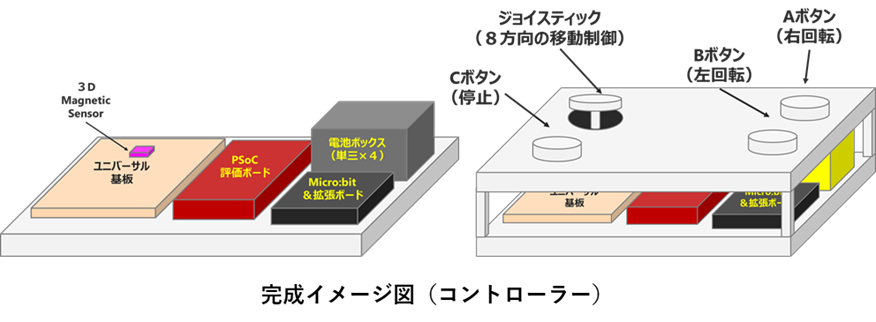
For operability, we used anInfineon3D Magnetic Sensorto implement a joystick like a game console controller, allowing us to control the robot in eight directions.

Now that we have decided on the concept, we will decide on the specifications based on this concept.
"Determining the specs~It's more square than I expected, you~"
The robot can move in eight directions depending on the direction in which you tilt the controller's joystick, and is controlled by SOP so that it can rotate and stop using mechanical switches.
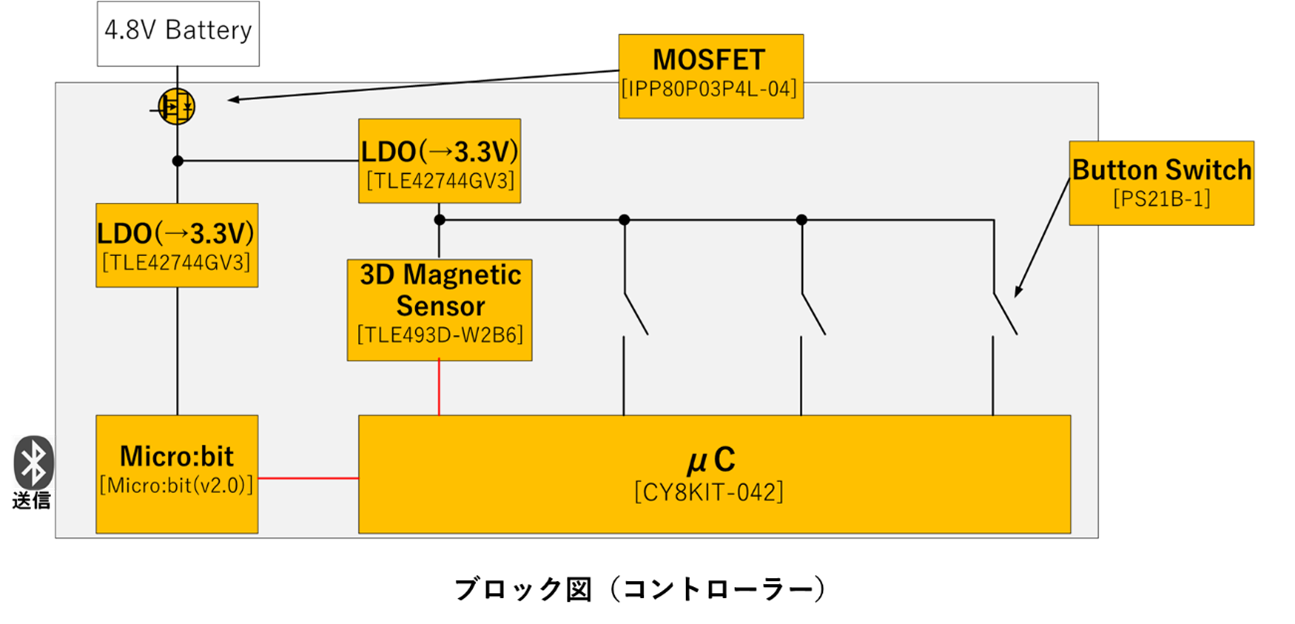
A microcomputer board called Micro:bit that can perform wireless communication is used for communication between the controller and the robot, and the system is such that signals from the SOP are sent to the robot.
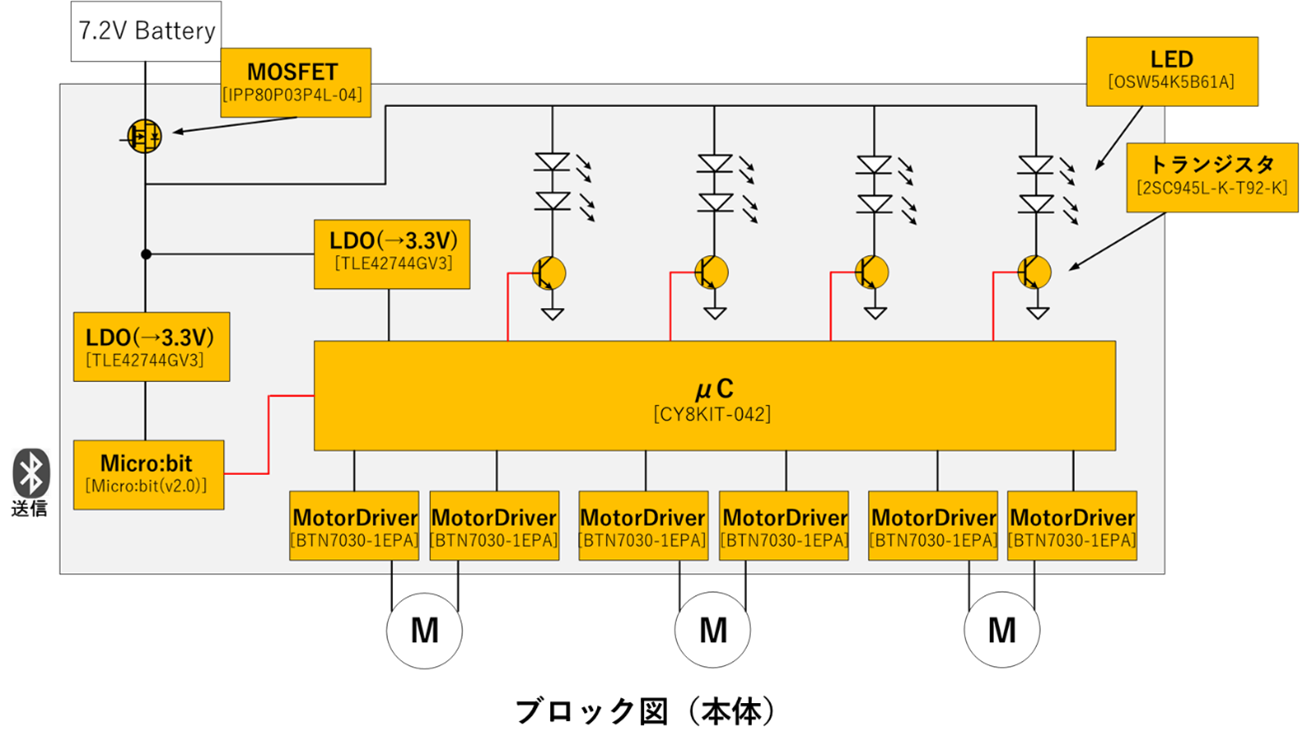
Based on the specifications, we selected the parts and created the block diagram shown below!
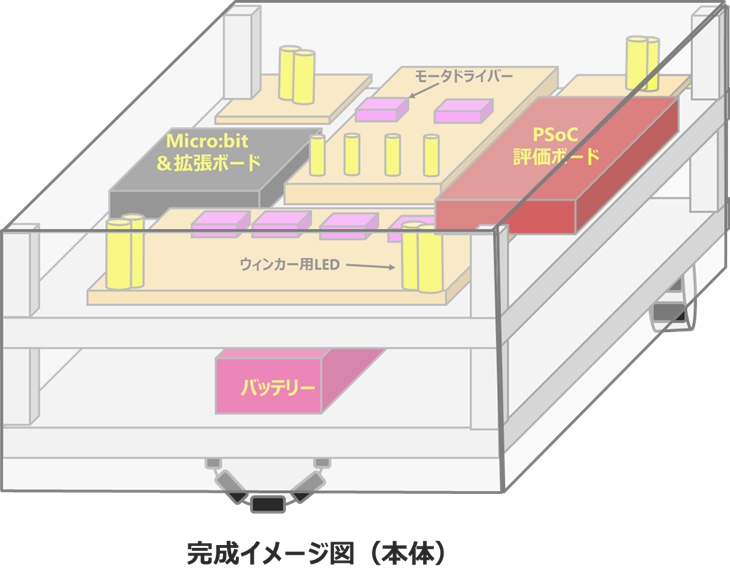
To control the motor of the robot body, we use a half bridge type Infineon motor driver that has two MOSFETs and a gate driver integrated into a single chip. By using two Half Bridge drivers for one motor, you can configure an H Bridge and control forward and reverse rotation.
SOP controls the motor driver based on signals from the controller.
We also implemented LEDs on all sides of the aircraft, and a function that lights up each LED according to each movement motion (I think it's better to be flashy anyway!)
Based on the specifications, we selected the parts and created the block diagram shown below!
Well, we have progressed smoothly from deciding on the concept, deciding on the specifications, and creating the block diagram. On the next page, we'll finally get to work on creating the robot, but isn't it fun to just watch blog posts where the robot is completed smoothly? Are you bored?
But don't worry, everyone! This robot production diary is not a simple blog! Please look forward to the eventful implementation episode where the new engineer is in a hurry from the next page! !
[A rookie engineer's soccer robot production diary]
Episode 1: “Macnica Cup is being held?!”
Episode 2: “Is this the strongest soccer robot? ! Your name is Maradona! ! ”
Episode 3: "Revive again and again! Phoenix Maradona-kun!!"
Episode 4: "The time to wake up has come, let's go! Maradona-kun!!"
Episode 5 "KICK OFF of Fate! ! The one who will take the crown is...