- 半導体事業HOME
- マクニカの製品・サービス
-
技術情報

-
イベント・セミナー
- 取扱メーカー
- サポート
- お問い合わせ
- 製品購入はこちら
- 半導体事業のメルマガ登録

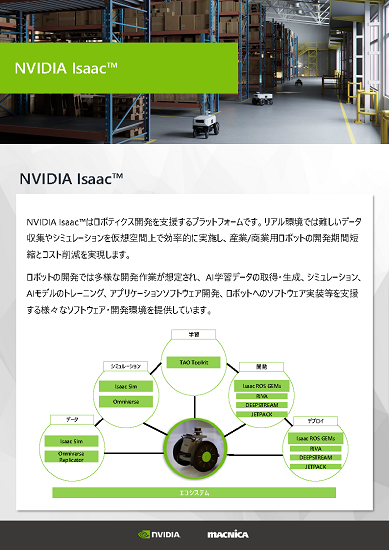
NVIDIA Isaac™ とは
NVIDIA Isaac™は、NVIDIA社提供のロボティクス開発を支援するプラットフォームです。
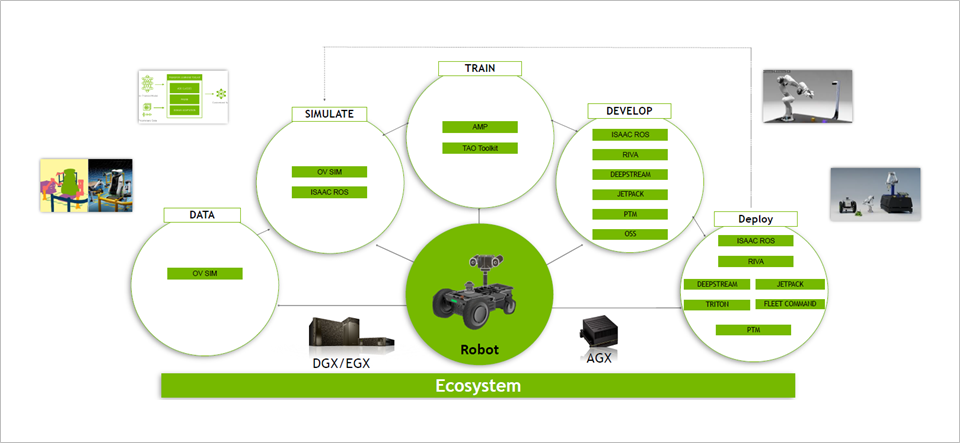
ロボットの開発では、 AI 学習データの取得・生成、シミュレーション、 AI モデルのトレーニング、アプリケーションソフトウェア開発、ロボットへのソフトウェア実装等、多様な開発作業が想定されます。この一連の開発を支援するために、 AI 学習データの取得・生成・シミュレーションにはOmniverse を基盤とするNVIDIA Isaac Sim、AI モデルのトレーニングとモデル生成にはNVIDIA TAO Toolkit、開発にはNVIDIA Isaac ROS、ロボットへのソフトウェア実装では NVIDIA Triton™ など、 多種多様なソフトウェア・開発環境を提供しています。
本ページでは、Isaac SimとIsaac ROSについてご紹介します。
Source: NVIDIA
Isaac Simの特長
Isaac Simは、Omniverseを基盤としたロボットシミュレーションを行うアプリケーションツールです。Omniverseで構築したフォトリアルな仮想環境(デジタルツイン)にロボットモデル等のアセットをインポートし、操作シミュレーションやナビゲーションシミュレーションの実施が可能です。これらのシミュレーターはロボットの導入にかかる費用や工数の削減に貢献します。

Isaac Replicator
AIモデルのトレーニングには、膨大な量と種類のデータセットが必要になります。十分なデータセットを収集するには、コストと時間がかかるうえ、困難や危険を伴う場合もあります。Isaac Replicatorを利用すると、予め定義された多様な条件環境で、AI学習に用いる画像を自動生成することが可能になります。
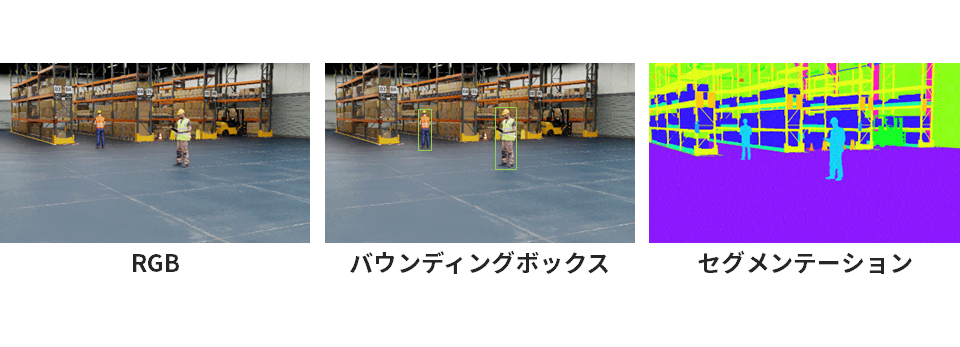
ドメインランダマイゼーション機能により、配置物体リスト、配置位置、角度、ライティング条件、カメラ条件、テクスチャー等に関してランダムなパラメーター条件を設定することができます。生成されるデータセット出力画像は、バウンディング ボックス、深度、セグメンテーション等に対応しており、自動で多様なシーンのデータセット生成が可能です。
Source: NVIDIA
People Simulation
People Simulation機能により、仮想空間上で人物を歩行させることが可能になります。
人物が含まれたシーンのAIデータセット画像の生成や、人物が歩行する環境でロボットが人物を認識/回避するアルゴリズムのテスト等で活用できます。

Source: NVIDIA
ROS/ROS2 Bridge
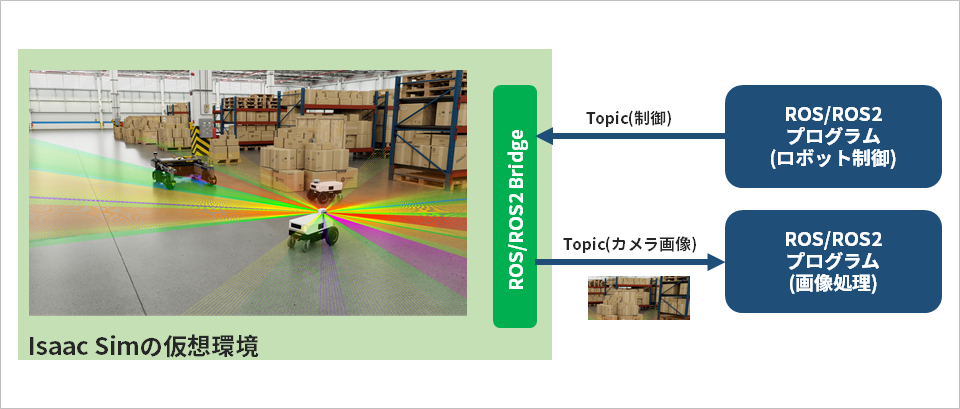
ROS/ROS2 Bridge機能により、ROSやROS2のプログラムで実行されるTopic(メッセージ)を使用して、Isaac Sim上のロボットと通信することが可能になります。
実行例
・ROS/ROS2のプログラムから送信される制御Topicで仮想環境内にあるロボットの走行制御
・仮想環境内にあるロボットに搭載のカメラやレーダーなど、センサーのTopic情報を使用したROS/ROS2プログラムの実行
Isaac ROSの特長
Isaac ROSは、NVIDIA GPU およびNVIDIA® Jetson™プラットフォーム上で、自律移動ロボットのアプリケーション開発を加速するハードウェア アクセラレーション パッケージです。 ROS2対応のため、他のROS2パッケージと組み合わせてROS2アプリケーション開発を可能にします。
また、Isaac ROS GEMs と呼ばれる自律移動ロボット開発に有用なアルゴリズムコレクションが含まれており、物体検知、自己位置推定、ナビゲーションといった機能を追加して動作を確認することができます。
動作環境は、NVIDIA GPU搭載のLinux-PC(x86_64)および Jetsonに対応しており、ロボットの実機がなくても、Linux-PC上で動作するIsaac Sim内のロボットモデルを利用して、AI機能を追加したROS2アプリケーションの動作確認を行うこともできます。
実施例:ROS2プログラムにAI処理(人物検知)を追加
・ロボットの実機に搭載する組み込みGPU(Jetson)で実行
・Linux-PCで動作するIsaac Sim上のロボットを制御可能
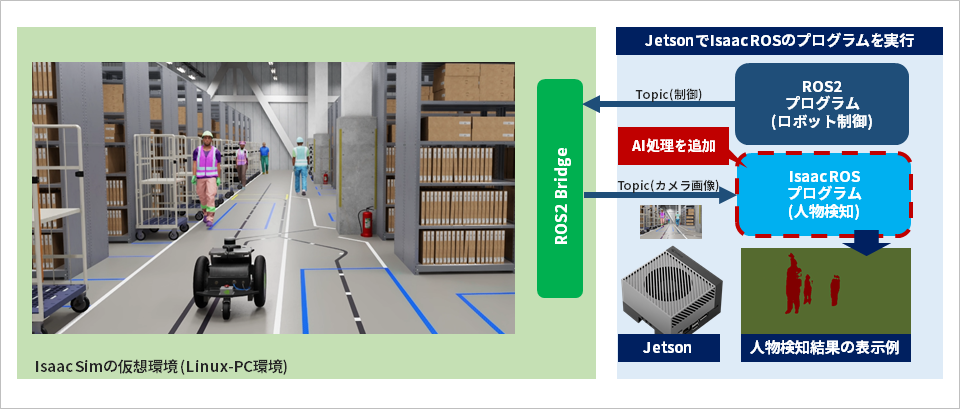
マクニカ倉庫の仮想空間(デジタルツイン)におけるロボット走行シミュレーションの実施例
Isaac ROS GEMs
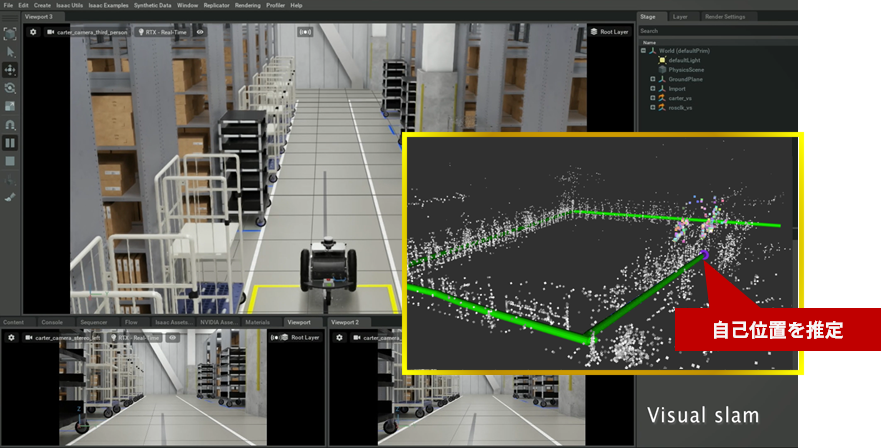
Visual SLAM:ステレオカメラの画像からロボットの自己位置を推定
Visual SLAMの実行画面で、ロボットに搭載されたステレオカメラの画像から周囲物体との距離を算出し、ロボットの自己位置を推定しています。
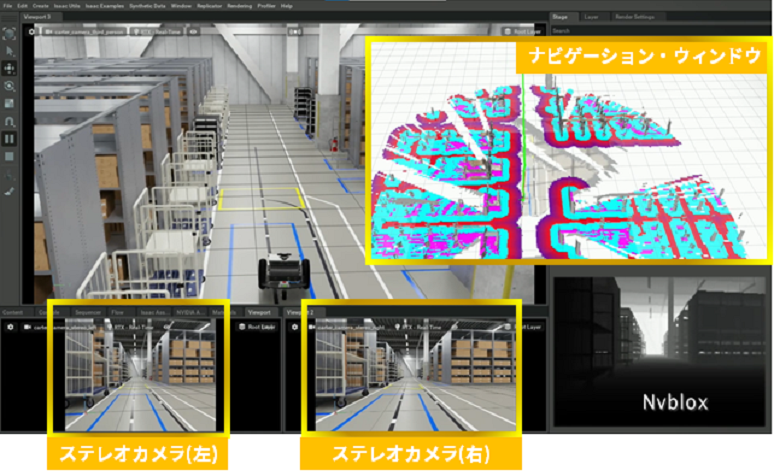
NVBLOX:指定した地点へロボットを自動走行
ステレオカメラ等のリアルタイムセンサー情報からロボット周囲の環境を3D画像として構築します。パスプランナーにより衝突のないパスを生成し、ナビゲーションウィンドウで指定したゴール地点までロボットの自動走行が可能です。
詳細資料はこちら
NVIDIA Isaac の詳細について、ダウンロード資料をご用意しております。
ぜひご活用ください。
お問い合わせはこちら
マクニカではIsaacを中心としたNVIDIAソフトウェアソリューションを提供し、ロボティクス関連企業のご支援にて多くの実績がございます。これからAI導入をご検討の方は、ぜひお問合せください。
AI TRY NOW PROGRAM とは
NVIDIA開発環境上で最新のAIソリューションを自社への導入前に検証できるサポートプログラムです。
NVIDIA AI Enterprise、NVIDIA Omniverseをはじめとするソフトウェア製品の理解を深めて、導入目的の実現性を事前に調査可能です。
関連製品ページ