- 半導体事業HOME
- マクニカの製品・サービス
-
技術情報

-
イベント・セミナー
- 取扱メーカー
- サポート
- お問い合わせ
- 製品購入はこちら
- 半導体事業のメルマガ登録
![]()
![]() 条件を指定して絞り込む
条件を指定して絞り込む
現在2136件がヒットしています。check

一巡伝達関数
なぜこのようになるか(図17のピーク)を考えるために、図18の一巡伝達関数A0βを考えます。R0は、オペアンプの出力抵抗で、μA741の場合、75Ωです。利得2のときR1=R2=100kΩとします。
図18の式に示すように、βが1次遅れ回路となります。この遅れ回路の分母の定数項が遅れ回路のカットオフ周波数(角周波数)ω3で、この例の場合、212kHzです。
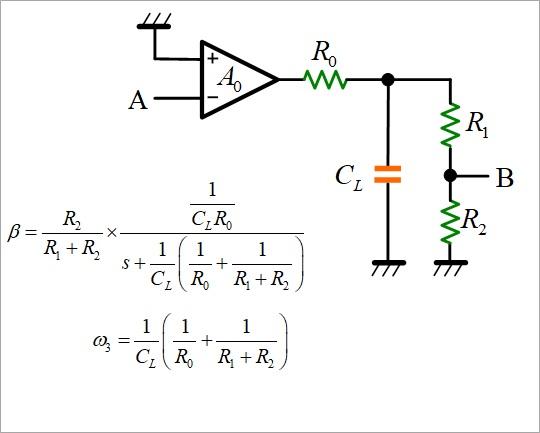
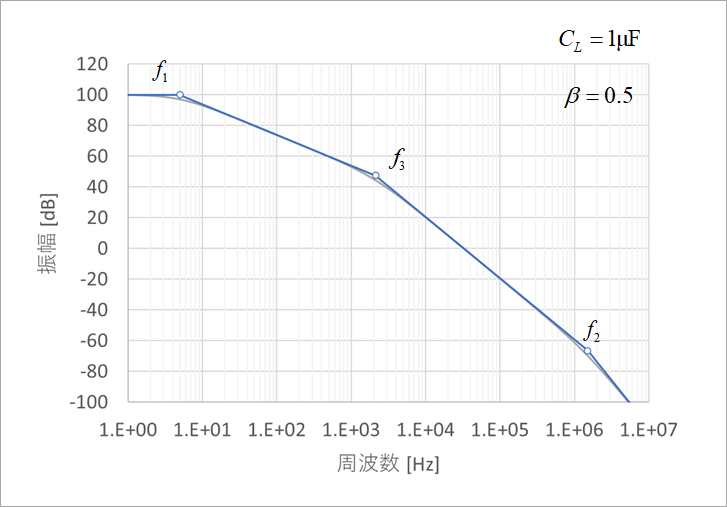
図19にAβの周波数特性を折れ線で示します。同図のf3がβの遅れ回路のカットオフ周波数です。
この回路を安定判別するために、図20(a)の振幅特性と図20(b)の位相特性で判定します。ここで、CL=1μF、R1=R2、すなわちβ=0.5、利得2の場合を考えます。図20(a)で利得が0dBになる点は、32.5kHzで、このときに位相は、図20(b)から-177.5°となり、-180°からの位相余裕PMは2.5°しかありません。この結果、時間応答が図16(b)のように振動します。位相余裕が72°の図9(b)と比べるとその違いが分かります。
この、利得と位相の二つのグラフをボード線路といい、系の安定を判別する一つの方法です。この回路は、遅れ回路が3段になるので、位相は最終的に-180°より小さく(負に大きく)なります。-180°とクロスする点は、図20(b)から56.5kHzです。図20(a)に戻って、56.5kHzのときの利得-9.6dBを読み取ります。この利得の0dBから下回っている値9.6dBを、ゲイン余裕GMといいます。ゲイン余裕GMと位相余裕PMそれぞれの目安は、回路の目的によって異なりますが、通常は、GMは20dB、PMは60°あれば十分でしょう。
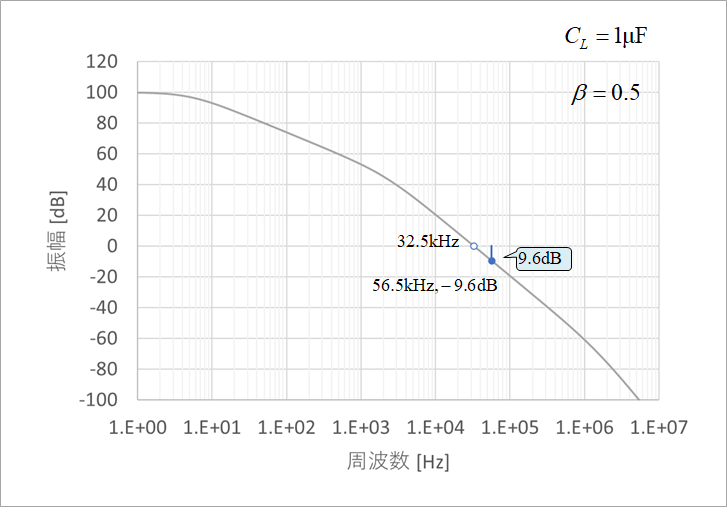
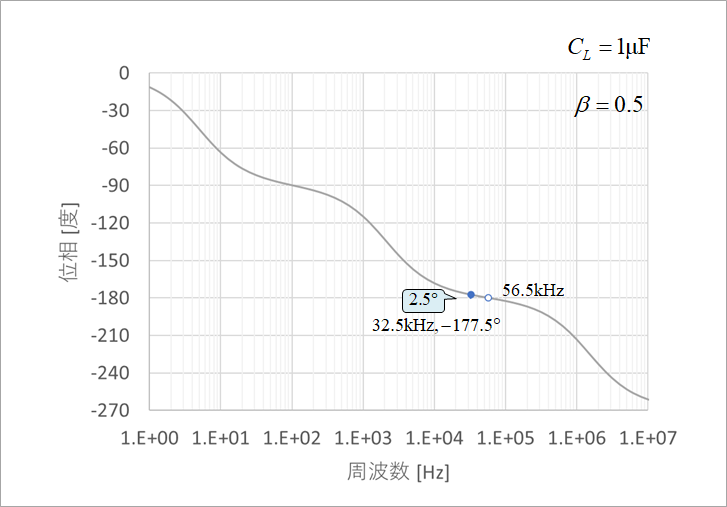
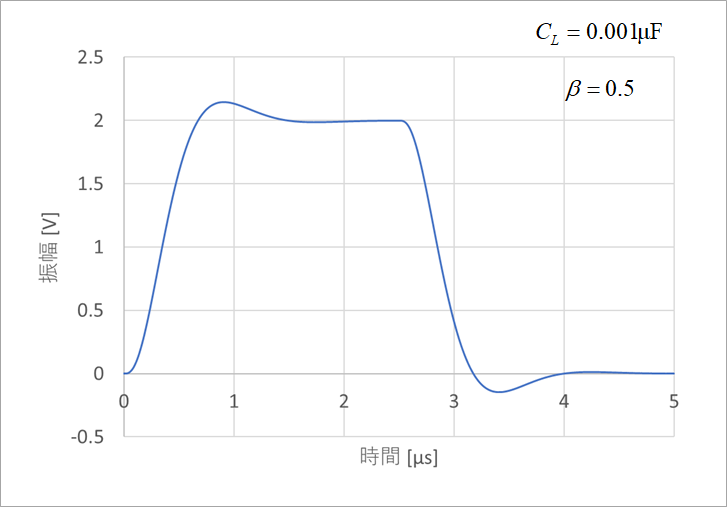
図21に、この回路の負荷容量に対する位相余裕を計算して示します。CLを小さくすると、最終的に無負荷のときの72°に漸近します。同図から、位相余裕PMが60°のときの負荷容量CLは、0.001μFです。
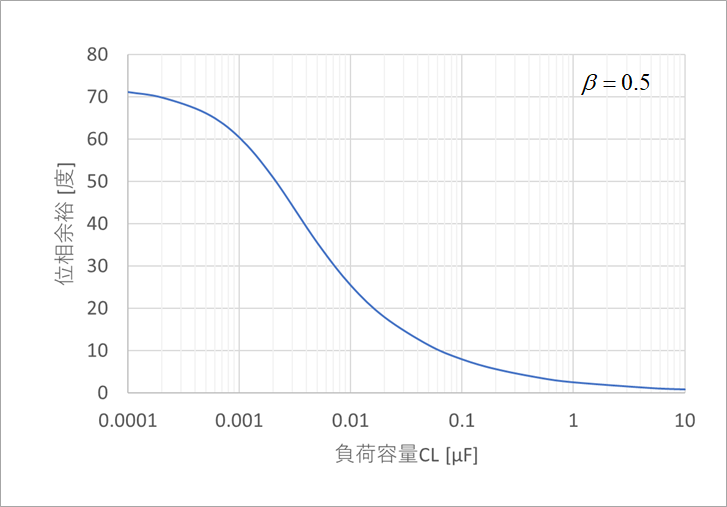
図22に、このときの応答波形を示します。
容量負荷による発振問題は過去からよく生じる事例で、筆者も多くの相談を受けてきました。これは、容量を付加すると振動や発振は抑制されるという「思い込み」からくるものです。「負帰還回路に容量負荷は発振の可能性がある」ということを常に頭の中においてください。同様の発振の問題は、エミッタホロアやソースホロア回路でも生じます。
この例は、通常のオペアンプの容量負荷として述べました。一般的には、オペアンプの出力に1μFの容量負荷を接続することはあまりないと思います。電源の出力にオペアンプと類似の回路が用いられる場合は、出力抵抗は、例えば0.1Ω程度でしょう。このオペアンプの例に比べて、3桁ほど小さい値なので、この例の、1μFの負荷は、電源では1,000μFに相当します。オペアンプのモデル(出力抵抗)を変更すれば同様の解析が可能です。
安定化のための解決策の例
波形の振動は、位相の遅れに起因しています。
分かりやすいたとえ話で、冗談半分ですが、「余談2」をご覧ください。
対策としては、位相の遅れを、逆に進めてやればよいわけです。
位相進み回路の基本形は、図1(b)です。
これに近い形を一巡伝達関数に取り込みます。
図23の帰還抵抗R1、R2の、R1に並列に抵抗RSとキャパシタCSの直列回路を追加します。同図(b)は、帰還回路だけを抜き出したものです。この回路の伝達関数F(s)を同図に示します。RSとCSの値を、RS=10kΩ、CS=60pFとした例について述べます。
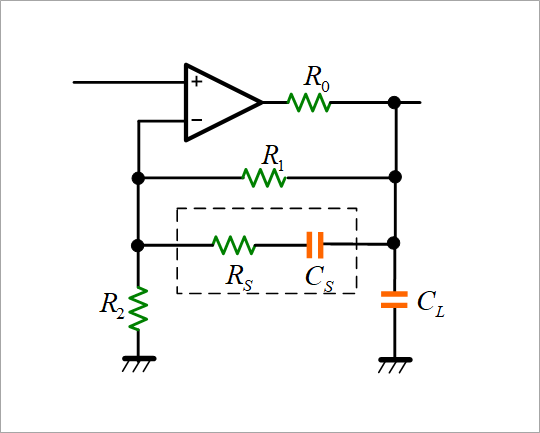
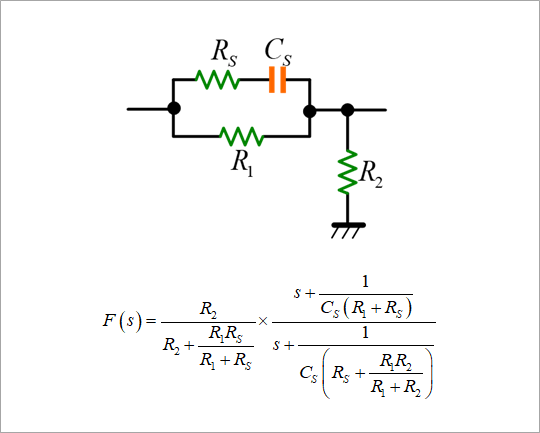
図24は、図23の上記定数のときの位相進み回路の位相特性です。
数100kHzの周波数帯で17°程度の位相進みが得られます。
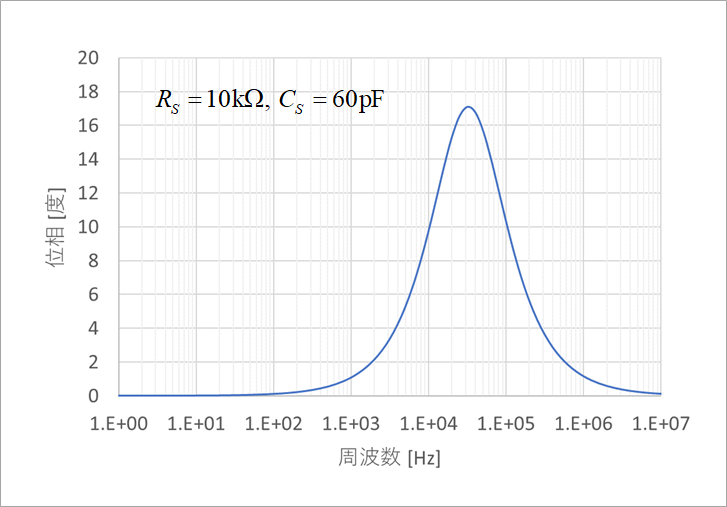
図25は進み回路の有無と一巡伝達関数Aβの位相特性を比較して示します。十分ではありませんが、18.5°の位相余裕となりました。
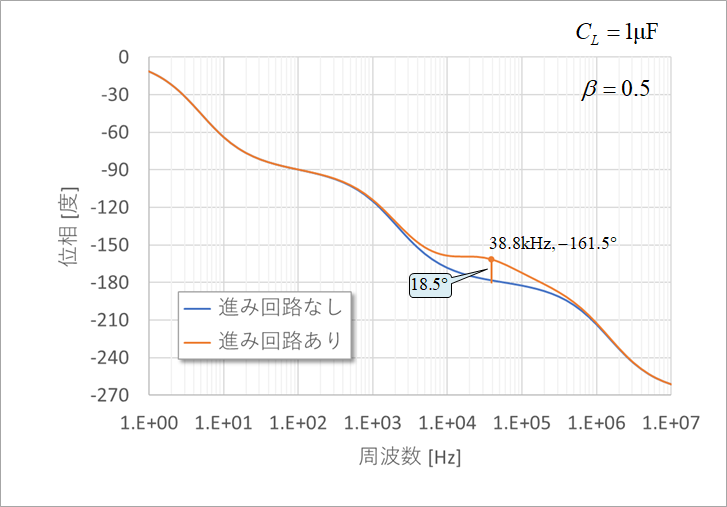
図26は、進み回路を追加したときの出力波形です。図16と比較すると、振動が抑制されていることが分かります。
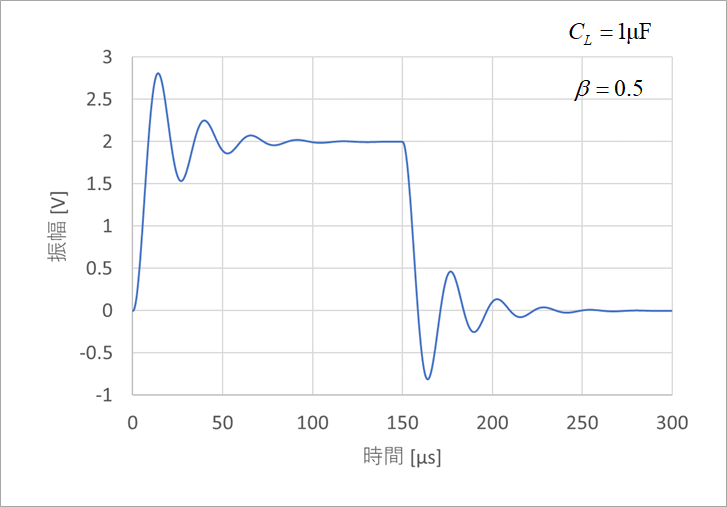
図27は、容量負荷のあるときの閉ループ利得を、進み補償の有無とともに示します。A0βのゼロクロス周波数の手前付近で、利得は大きなピークを持ちます。進み補償を追加すると、そのピークを抑えることができます。
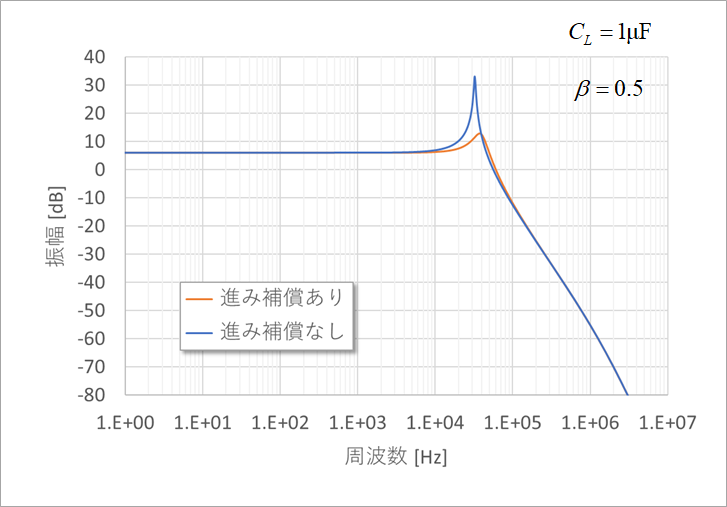
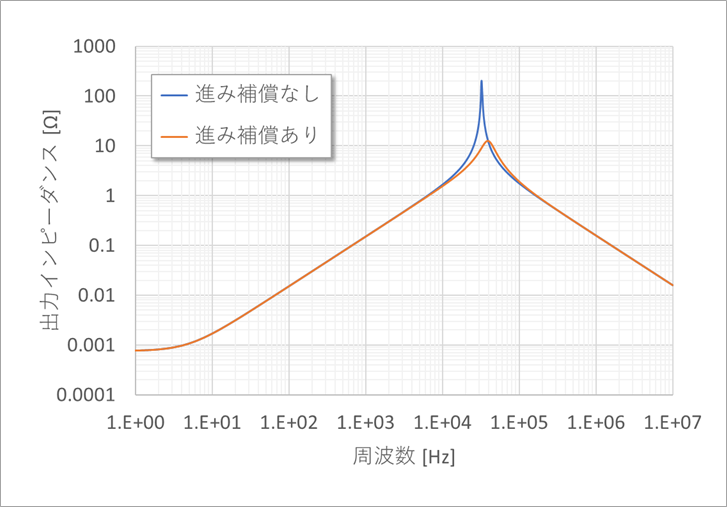
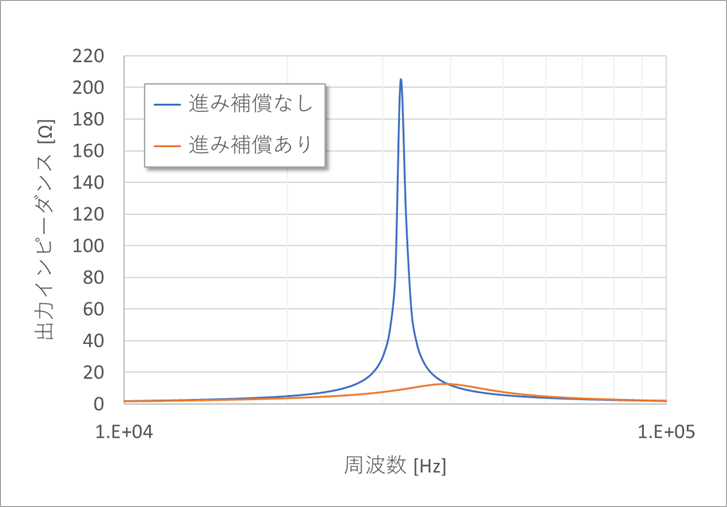
図28は、負荷容量CL=1μFのときの出力インピーダンスを、進み補償の有無に分けて示します。(a)は縦軸が対数目盛りでピークの値がそれほど違わないように感じますが、縦軸を直線目盛りにした(b)では、進み補償の有無で出力インピーダンスの違いが分かると思います。
ナイキストの安定判別
ボード線図による安定判別のほかに、ナイキストの安定判別(脚注4)という方法があります。ボード線図の振幅と位相を極座標で表示します。
図29(a)は、1Hzから10MHzまで矢印の方向に描いています。ナイキスト判別で必要なのは、位相が-180°前後のデータです。同図(b)は、この必要な範囲(33kHzから10MHz)だけを抜き出したものです。この曲線が横軸と交わる点は振幅の虚数部がゼロ、すなわち位相が-180°となる点です。これは、図20(b)の56.5kHzに相当します。不安定の条件は、この点における利得が0dBすなわち1以上です。
すなわち、図29(b)の(-1,0)より左を軌跡が通過することになります。同図(b)はゼロクロスの点が-0.33付近なので、かなり不安定に近い状態です。
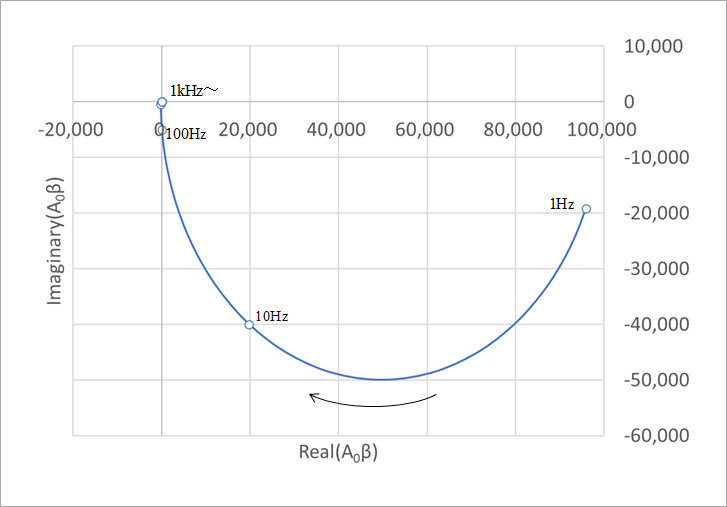
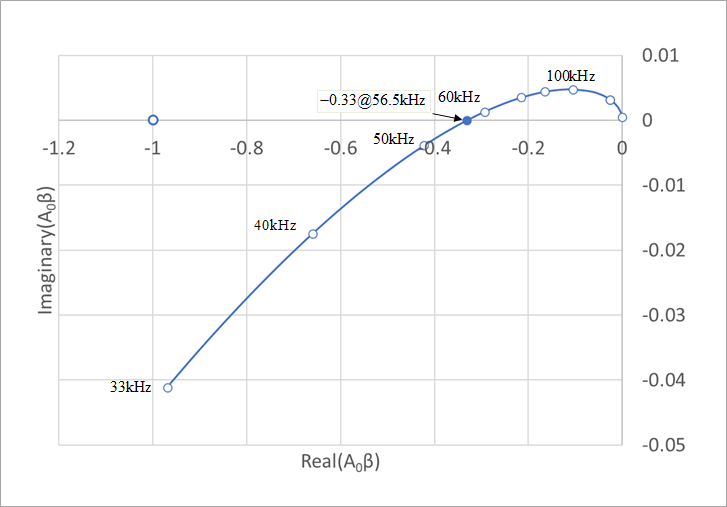
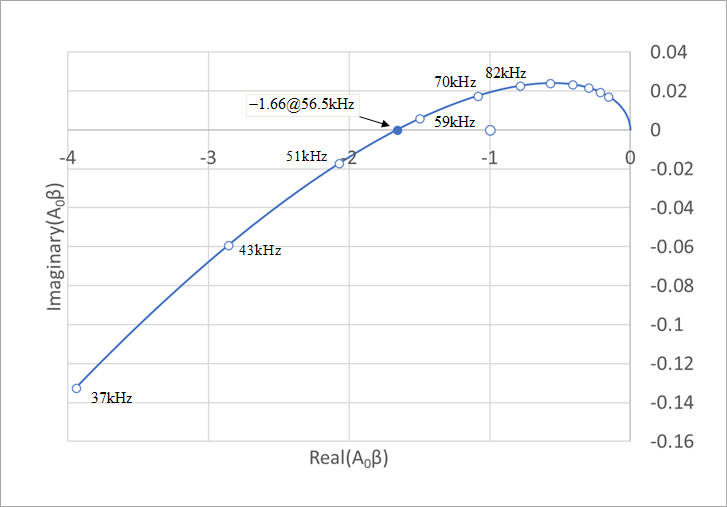
図30は、進み補償を施した場合のナイキスト線図です。ゼロクロス点は、(-1,0)から遠く、ほとんど原点(0,0)に近いので安定と判定できます。
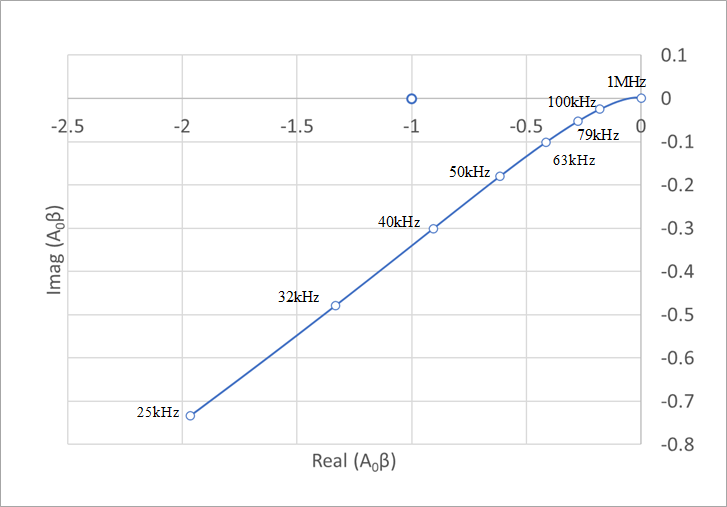
図31は、不安定な条件をあえて作り出した例です。1μFの容量負荷のときに、オペアンプのGB積を、5MHzとしたものです。(-1,0)の点を、内側すなわち右側にみて軌跡が通過します。この状態では、回路は発振に至ります。
帰還回路の安定判別は、ボード線図とナイキスト線図のどちらか、やりやすい方法を選択すればよいでしょう。
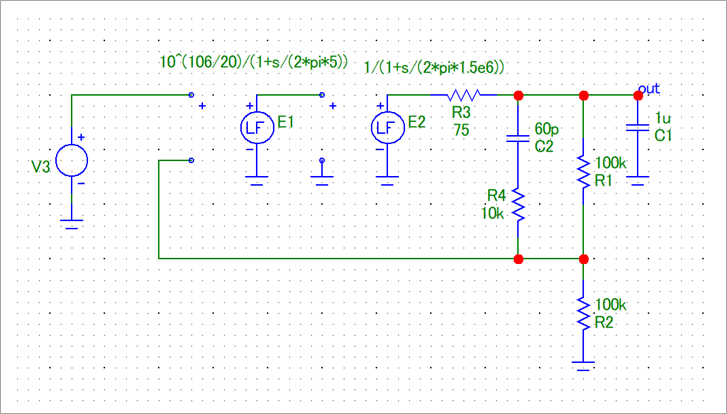
本稿の解析は、周波数の式を立てて、エクセルで計算し、時間応答は、FFTで求めました。検証のために、SPICEでも解析しました。図32は、SPICEの解析回路です。
オペアンプは、ラプラスの信号源(Laplace formula VofV)を用いました。遅れ回路は、1/(1+s/ω1)と1/(1+s/ω2)、それに直流の106dBの利得、10^(106/20)を組み合わせました。これ以外は、特に説明は不要と思います。
脚注4
スエーデンの物理学者 Harry Nyquist が考案したフィードバック系の安定判別法です。
ナイキストは、この他にも、標本化定理(ナイキスト周波数)、熱雑音などに功績があります。
「余談2」
これは、筆者の専門分野ではないので、単なる憶測なので、そのつもりで。
人間が自転車に乗って、まっすぐ走ることができるのは、負帰還回路です。
右に行きそうになると、左に修正しろと脳が指令を出します。その指令が遅れなく出されるので、スムーズに走ることができます。
以下は法律違反で危険なので、あくまで例え話としてとらえてください。
酒に酔っぱらって自転車に乗ると、ふらつきます。ひどいときには、路肩に落ちそうになって、また中心に戻り、今度は反対側に落ちそうになります。
この原因は、制御回路に遅延が生じているためと考えます。
右に行きそうになっても、指令が遅れて、制御が間に合わずそのまま右に行きます。行き過ぎたあたりで、指令が遅れて到達して左にハンドルをとります。
遅れが大きくなる、すなわち飲酒の度合いが大きいほど振動が大きくなります。
半分冗談で書きましたが、理論的には振動の原因が理解できると思います。
飲酒運転は、このように判断が遅れるので危険なわけです。くれぐれも飲んだら乗るなを守ってください。
碓井有三のスペシャリストコラムとは?
基礎の基礎といったレベルから入って、いまさら聞けないようなテーマや初心者向けのテーマ、さらには少し高級なレベルまでを含め、できる限り分かりやすく噛み砕いて述べている連載コラムです。
もしかしたら、他にも気になるテーマがあるかも知れませんよ!