- 半導体事業HOME
- マクニカの製品・サービス
-
技術情報

-
イベント・セミナー
- 取扱メーカー
- サポート
- お問い合わせ
- 製品購入はこちら
- 半導体事業のメルマガ登録
![]()
![]() 条件を指定して絞り込む
条件を指定して絞り込む
現在2183件がヒットしています。check

こんにちは、3月まで大学で化学を学び、オームの法則すら存在を忘れていた山のフドウです。
私はマクニカに技術職として入社し、実習形式でライントレースカーを作りながら電気電子基礎を学ぶ製作実習をおこないました。
この製作実習を通して学んだことや経験したことを共有できるような内容で計4回連載していきますので、温かい目で見ていただきますよう、よろしくお願いいたします。
本ブログは、その4回目。電源から作るライントレースカー(ライントレースカーの回路実装編)の続きとなります。
基板の完成
振り返り
前回までで、LT1765 という DC/DC コンバーターをユニバーサル基板に実装してしっかりと 9V から 6V に降圧することができました。
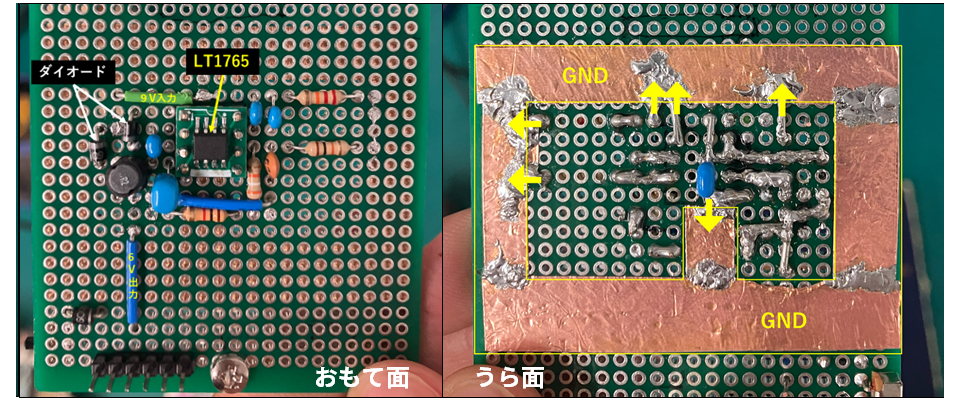
図1:DC/DCコンバーターの基板レイアウト
また、図2の機能達を実現させるために図1の基板に各種配線を増やしていく必要があるところまで考えました。
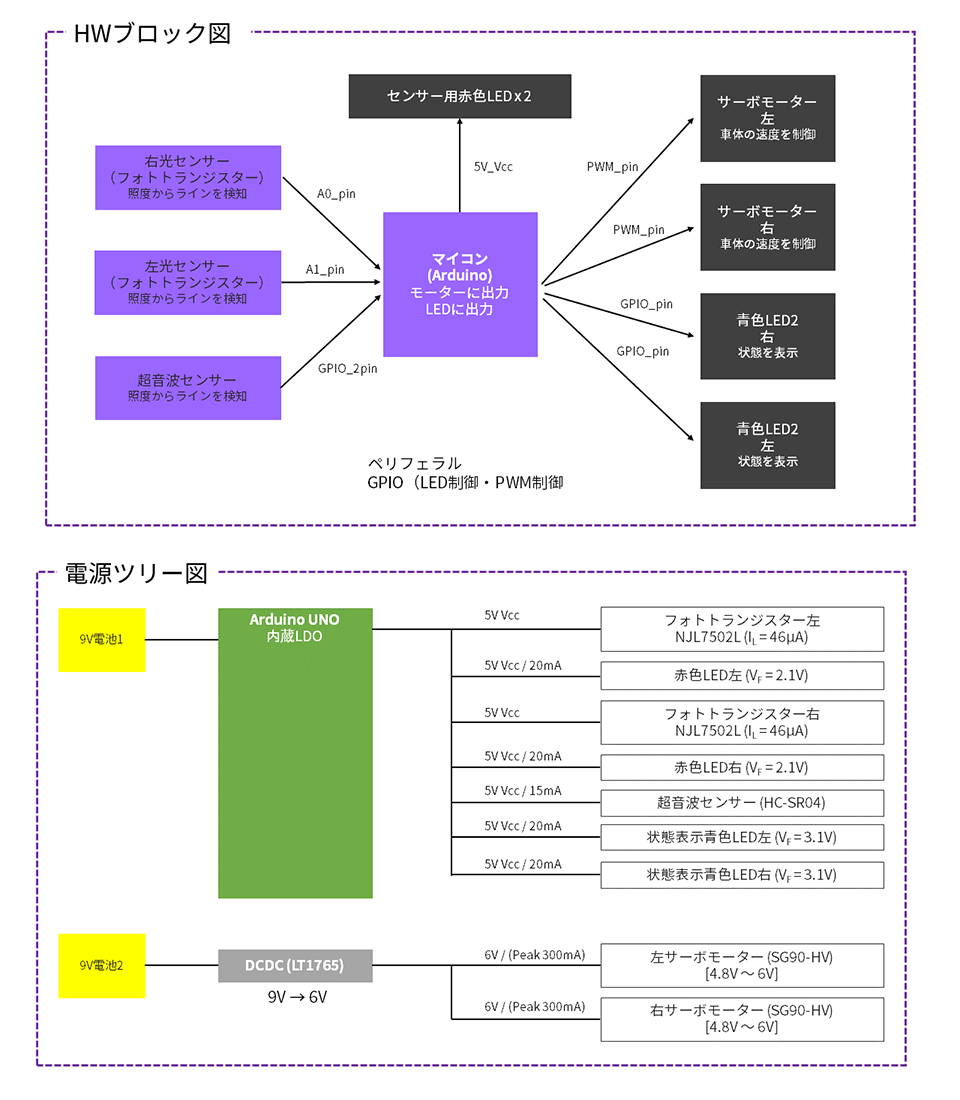
図2:ハードウェア (HW) ブロック図、電源ツリー図
ライントレース動作について
そもそもどうやってライントレースをおこなうかについてです。これは下記のサイトを参考にし、丸々同じものを作製しました。
・初心者でもできる!Arduinoでつくるライントレースカーの制作【第2回】光センサを組み立てて車体へ取り付ける
このサイトの通りに作ればライントレースカーの最も必要な線を読み取る部分が完成します!読んでいただくとわかりますが、フォトトランジスターを使ってLEDから出て反射した光の値を電圧として出力するのですが、LEDで当てた光は、黒線上となにもないところで反射する光の量が変わります。この出力される電圧を Arduino に入力して、黒線上か何もないところかを判別します。
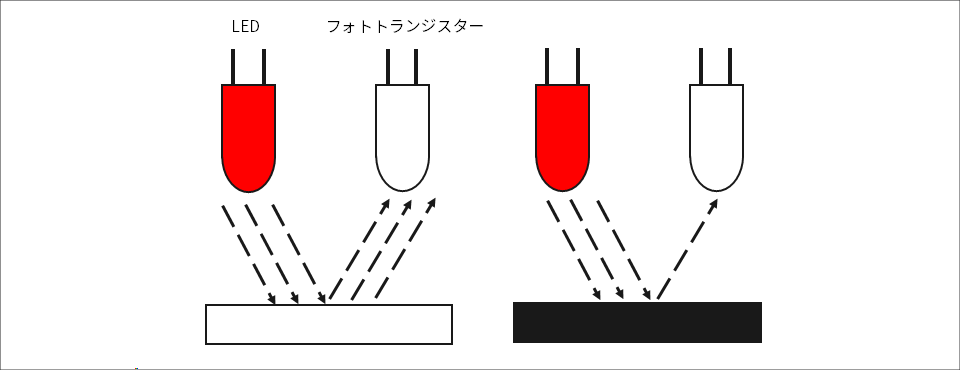
図3:フォトトランジスターを用いたラインレースイメージ
本体にクワガタのように LED とフォトトランジスターの組み合わせを 2つつけることで、黒線を検知したらモーターの回転速度を変更するというのを繰り返すわけですね!
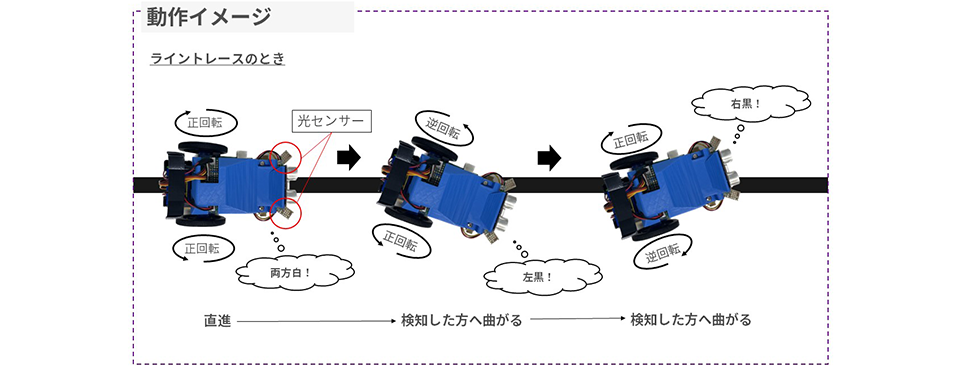
図4:動作イメージ
基板実装
図2のHWブロック図を構成する基板を長い長い時間かけて作製しました。それがこれです!

図5:完成基板
なんとまあごちゃごちゃして大変不格好なはんだ付けでしょうか。一応白文字で各種部品の説明を記載していますが、おもて面では以下の部品が見えます。
・一番上には障害物を検知する超音波センサーを取り付け
・超音波センサーの左右にある青色 LED は状態を表示
・真ん中に DC/DC コンバーターの LT1765 を配置
・DC/DC コンバーターに入力する用の電源と Arduino UNO に直接入力する用の 2つの電池に接続するためのアダプター
・2つの電池からなる電源系統を ON/OFF するためのスイッチ
一方うら面では次の部品が見えます。
・黒線を読み取るためのフォトトランジスターに接続してある飛び出たエナメル線
・銅箔でできた GND
・Arduino UNO のメスピンに直接刺すことができるピンヘッダー
・色々つなげすぎて汚くなってしまったはんだ達
上記のようなラインナップになっております!
自分でもわかりづらいくらい配線を集約して、ジャンパーピンを使い、そのせいで導通チェックではかなり苦労しました。ただ、その時の私としてはかなり頑張ったと自負しております!ただ、この後に色々動作チェックをしたのですが、もちろん全部がうまくいくことはなく何度もデバックをおこないました。それも踏まえて今後、手はんだで基板を作製される方にアドバイスをさせていただくならば
・集約することはいいことですが、レイアウト図の設計には時間を使ったほうがいいです
⇒あとからおこなう導通チェックやデバックが大変になってしまいます、、、
・基板を素手で触らない方がいいです
⇒接触不良の原因にもなりますし、汚れます、、、
恥ずかしながら今回の基板作製をもとに助言させていただきました。
筐体の作製
Arduino UNO との接続
もちろんアナログ部品だけを取り付けたユニバーサル基板だけでは動くわけがないので頭となる Arduino UNO を接続していきます。図5のうら面にあるように Arduino UNO へ直接接続できるようなピンヘッダーを準備しております。Arduino UNO は図6のような作りになっており、たくさんのピンがある中で使う部分だけを赤枠で示しました。
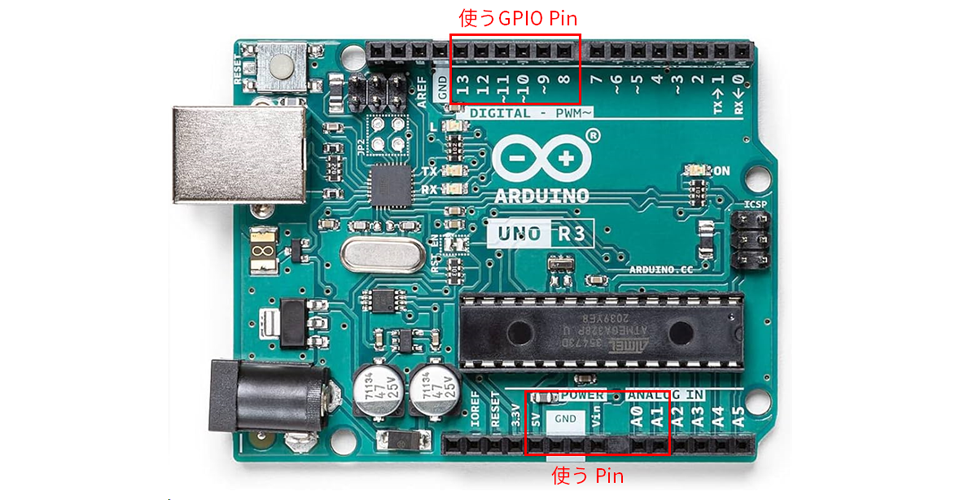
図6:Arduino UNO の使うピン
この赤枠で囲った部分にユニバーサル基板からダイレクトに接続できるようにピンヘッダーを取り付けましたので、これを基板と組み合わせるとこうなります!(図7)
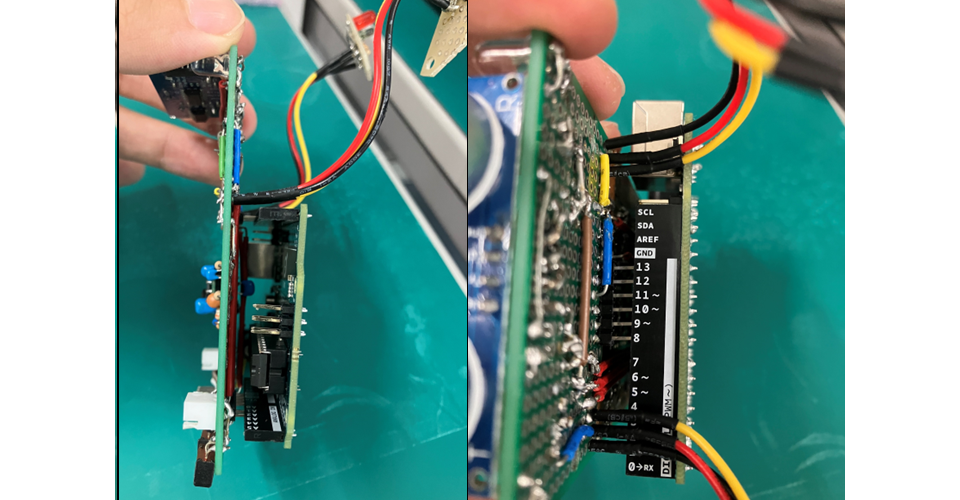
図7:ユニバーサル基板と Arduino UNO の接続
きれいに接続できていますね~。
ここはかなりのこだわりポイントで、基板のはんだが汚いのはあれですが、基板の集約だけではなく、筐体全体を小さく配線だらけにしないための工夫です。ユニバーサル基板と Arduino UNO の規格が決して合っているわけではないんですが、接続することができました。色々な機能を乗せながら基板をできるだけ小さくしたいという思いがあったので、初めての基板設計にしてはかなり上出来かなと勝手に思っています。
部品の組み立て
基板はできたのでいいのですが、ライントレースカー本体を組み立てなければなりません。小さいころからプラモデルなどは作ってきましたが、設計図がないところからの本体の作成はやったことがないですし、イメージはあっても、じゃあどうやって作るんだってなって困ってしまいました。
そこでまずはライントレース機能のところで参考にしたURLに出てくる戦車?のようなものをそのままマネてみることにしました。
・初心者でもできる!Arduinoでつくるライントレースカーの制作【第3回】センサ、ドライバ、マイコンを車体に組み込みライントレーサーとして仕上げる
このURLに出てくる部品も丸々買い出しして、、、、
できたのがこちら(図8)
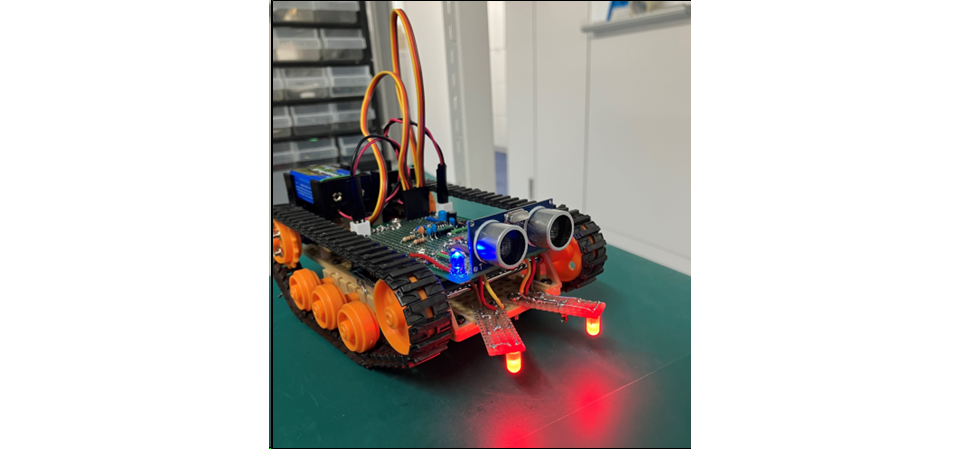
図8:初号機の完成
先人のウェブサイトに忠実に作ってみました。ライントレースのプログラムについてもウェブサイトの通りに作ったので、実際に黒線の上を走らせてみるとちゃんとライントレースすることができました。ただ真似ただけといえばその通りです、、、
完成へ
2号機の作成
実際に筐体を完成させ、走らせることもできて、一応ライントレースカーは完成しました。しました、したんですけども、、、
ただ!!!遅い!!!遅すぎる!!!!!
やはりキャタピラということもあり、回転させるのに力を使ってしまっているようです。また、小回りが利かない!!!!
小回りが利きません。正直この戦車のような状態でも完成で良かったのですが、やはりそこはアップグレードしたい。しなければならない。見た目もこだわりたい私はこの状態で終われるわけもなく、、、、そんな衝動で改造を始めました。
・キャタピラが大きい⇒小さくしよう
ということで土台を切ったりネジでとめたりしたらこうなりました(図9)
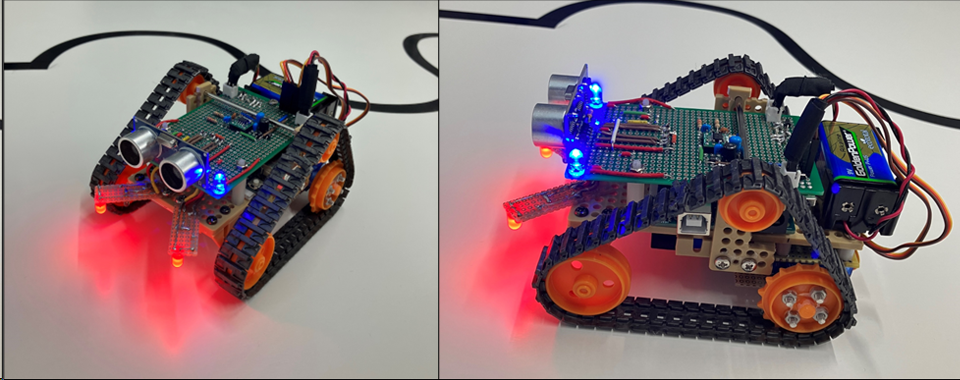
図9:2号機の完成
なんということでしょう。とてもかわいくなってないしょうか!?
某丸目ふたつのロボットのようです。奥行きを図8 に比べて 2/3 ほどの大きさにしました。これにより駆動輪が小さくなったので、小回りが利き速度も速くなりました。動作自体は特に変更をしていないので、同じ動作でただ機敏に動くことができるようになったことになりました。動作が筐体によって改善され、よりコンパクトにまとまったのがとてもうれしかったです。
ただここでも終わることはできません!
やはり見た目もこだわる以上、基板を隠したいですね!
ここで会社にある3Dプリンターで隠す入れ物を作成してみることにしました
見た目づくり
今回 Fusion 360 という無料の 3DCAD 作成アプリを使ってモデリングに挑戦しました。普段 Youtube などで、3D プリンターで印刷したものについて見たりするので、せっかくの機会だと思い、モデリングを実際にソフトをさわりながら学び、3Dモデルを作成してみました。しっかりサイズを細かく測り、ネジ穴も作ってライントレースカーにくっつけられるようにもしてみました。
それがこの画面(図10)

図10:Fusion 360 を使ったモデリング
ほぼ丸一日使って作成したモデルですがこれだけで見るとイメージが付きづらいかもしれません。
実際に 3D プリントして乗っけてみると・・・・
図11:3D プリンターを使ったライントレースカー
どうでしょうか!とてもいい感じではないでしょうか!
デザインがかっこいいかダサいかはご意見あるかもしれませんが、基板を隠すことでいい感じにおもちゃ感が増すというか、完成形という雰囲気が大きくなったのではないでしょうか。
やはり見た目にも凝ってみることが大事ですね!
我ながらかなり満足できるものが製作できたのではないかなと思っています。
これで完成です。
まとめ
いかがでしたでしょうか。本ブログは4部作になっており、今回が最後となってしまいます、、、、4部作では伝えられないほどこだわりが詰まっているせいでかなりすっ飛ばして内容を書いてしまいました。読みづらく部分的に省きすぎてしまい申し訳ございません。
とくに筐体づくり、筐体づくりについてはしっかりと設計して組み立てることで製作物への愛着が段違いで大きくなります!(自論)
この2号機はしっかりと愛でてあげたいと思います!!
私の自慢話のようなオチになってしまっているかもしれませんが、無事製作実習をライントレースカーで走り抜けることができました。
電気電子の基礎知識すらもない状態から、仕様を考え、回路図をつくり、部品を選び、実装、組み立てを行いました。筐体については人生での経験が生きてきたところはありますが、やはり電気電子においては、弊社に入社して最初の実習カリキュラムとして今後に活かす知識が多く着いたと肌で感じております。
今後お客様から大きな信頼をもらえるような提案や回答ができるようなFAEになれるように、成長していきたいと思います。
今後ともよろしくお願いいたします。
以上、最後までお付き合いいただきありがとうございました!
おまけ
実は、、、、この後にまた改造を施しまして。
やはり俊敏さがひつようならばそもそもキャタピラからタイヤ駆動に替えようと奮起しました。後輪はタイヤに、前輪はキャスターに変化させたものを再度作り直しました。
それがこれ(図12)
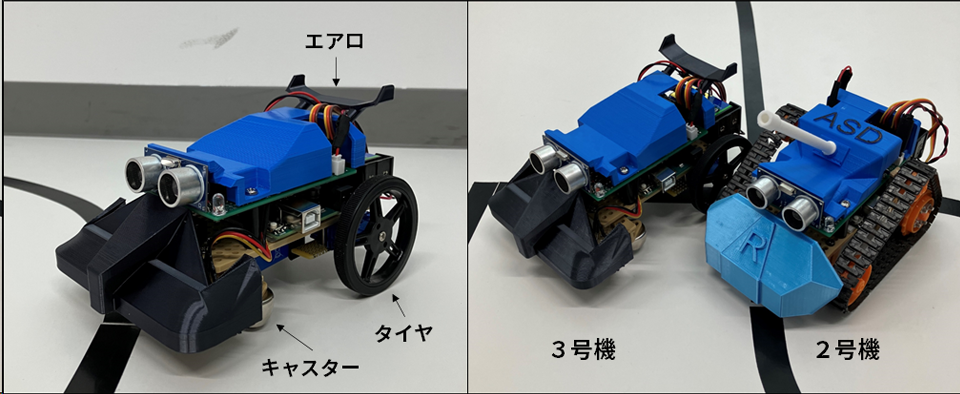
図12:実は作っていた 3号機
いかがでしょう、しっかりとカバーまでつけていますがエアロまでつけちゃって。
実際かなり早くなり、早くなりすぎてライントレース動作が追い付かないくらいでした。皆さんもぜひライントレースカー作りはタイヤでやるべきです(^^)
電源から作るライントレースカー記事一覧
・ライントレースカーの組み立て編