- 半導体事業HOME
- マクニカの製品・サービス
-
技術情報

-
イベント・セミナー
- 取扱メーカー
- サポート
- お問い合わせ
- 製品購入はこちら
- 半導体事業のメルマガ登録
![]()
![]() 条件を指定して絞り込む
条件を指定して絞り込む
現在2184件がヒットしています。check

こんにちは、3月まで大学で化学を学び、オームの法則すら存在を忘れていた山のフドウです。
私はマクニカに技術職として入社し、実習形式でライントレースカーを作りながら電気電子基礎を学ぶ製作実習をおこないました。
この製作実習を通して学んだことや経験したことを共有できるような内容で計4回連載していきますので、温かい目で見ていただきますよう、よろしくお願いいたします。
本ブログは、その3回目。電源から作るライントレースカー(DC/DCコンバーター実装準備編)の続きとなります。
電源基板の作成
実装!(はんだ付け)
前回は、図1のような回路を作成し、図2のような基板のレイアウトを作ってみました。これで動くのかもわからないものの、回路自体は評価ボードをほぼ丸パクリしているから動くはず、、、、と謎の自信をもって実装を始めました。
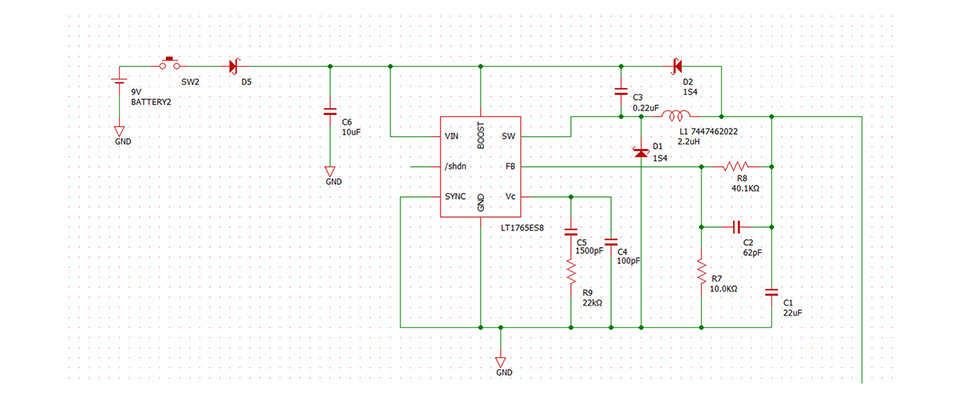
図1:回路図
図2:基板レイアウト
まずは部品を配置していくわけですが、マスを1つ1つ間違えないようにと。それがこれ(図3)。部品を置いただけですか、かなりスペースをぎりぎりまで小さく攻めて配置できているのではないでしょうか。
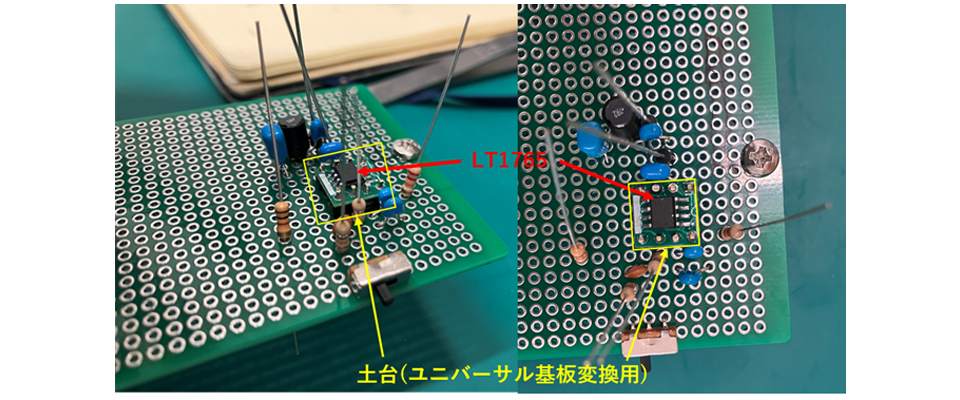
図3:ユニバーサル基板に配置だけしてみた状態
抵抗(図3のこけしみたいなもの)は、1本1本丁寧にラジオペンチで折り曲げて、ユニバーサル基板4マス分。コンデンサー(図3のお菓子のプッカを青く塗ったみたいなもの)もラジオペンチでまげてユニバーサル基板3マス分。インダクター(図3の奥にある黒い持ち運びスピーカーのようなもの)は斜めに2マス分。ちなみに、図3にある赤い矢印のLT1765はあまりにも小さいので、図3にある黄色枠の土台にはんだ付けをして、ユニバーサル基板に配置しています。(LT1765のICの足間隔は1.27mmなのでこのはんだ付けが細かすぎるのなんの、、、)
この配置が間違っていないことを確認したら、はんだ付けをおこなっていきます。もちろんこのまま裏を向けると全部落ちちゃうので、1個1個丁寧にはんだ付けをしていきます。
そしてできたのがこちら(図4)。
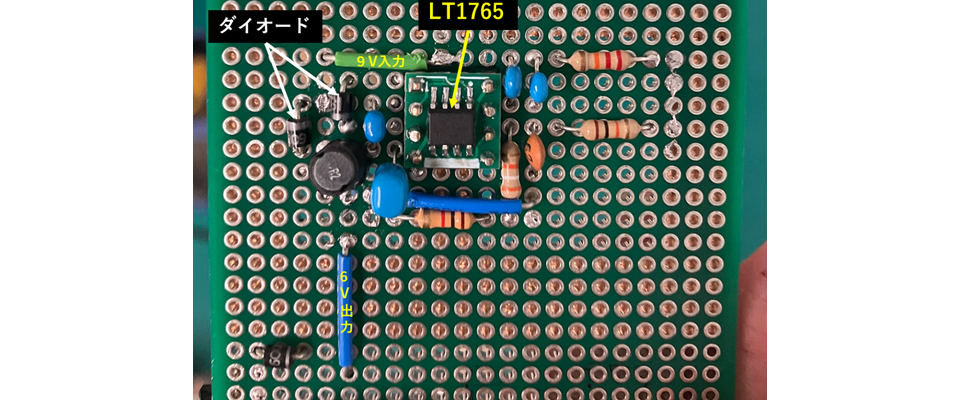
図4:回路基板おもて面
おもて面は意外ときれいにはんだ付けできているのではないでしょうか。
はんだ付けをするのは主に裏面なので、おもて面に部品を配置したのちに、1個ずつテープで固定して裏面をはんだ付けするやり方がおすすめです!ショットキーバリアダイオード(図4左上記載)は向きがあるので、間違えるとはんだ付けをやり直しになるので注意してください。(何回かやり直しました、、)
そして、はんだ付けを施した裏面はこちら(図5)
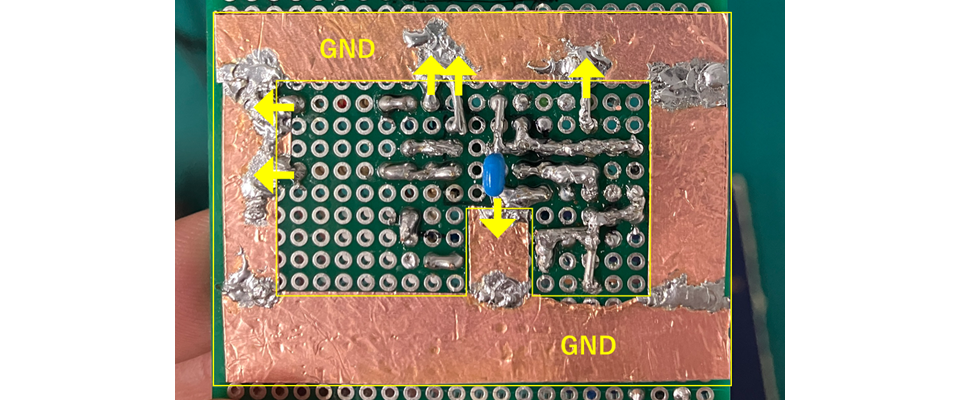
図5:回路基板うら面
いやーなかなかよくわからない絵面になっているかもしれません。
はんだが汚くなっていますが、配線をする際に針金などを使って抵抗やコンデンサーを回路としてつなげているのですが、実際これがとても難しかったです。黄色い枠がグラウンド(以下、GND)になっており、黄色の矢印は部品がGNDにつながっていることを表しています。GNDは広く循環するように銅箔を用いてレイアウトしています。GNDは回路においての基準 (0V) となり、細く小さく配置してしまうと、外部の影響を受けてしまいGNDの値が揺れてしまうことで、すべての電圧値が揺らぎかねません。そのため、図5のように広くべったりと配置して、外的要因(主にノイズ)の影響を受けにくいようにレイアウトしました。
これで一旦、私のライントレースカーのDC/DCコンバーター周りのはんだ付けは終わりです。
図6:GNDが安定しないと影響を受けてしまうイメージ(自作)
自作電源基板の評価
では、実際これがちゃんと動くのかという話になりますが、実験してみました。
おお!しっかりと6Vが出力されていることを確認しました!
実際にはノイズであったり過渡応答性だったりと評価すべき項目はありますが、この時の私はまだ知る由もなく、まずはICや回路自体の破損は見られずしっかりと動いていることが確認できて大変うれしかったです!
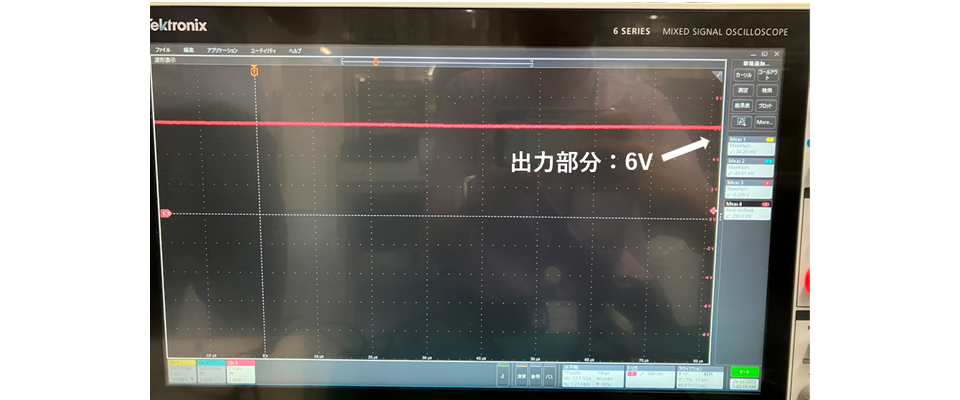
図7:実験結果
電源以外の周辺回路の作成
ライントレースカーの仕様について
私の製作実習はライントレースカーを作ることなので、LEDを光らせる回路や脳ミソであるマイコンにつなげる回路、モーターを接続する部分など多くの回路を実装する必要があります。過去に話せていませんでしたが、今回のライントレースカーの仕様を説明します。
| 製作物 | ライントレースカー | |
| 動作概要 | 黒い線をたどり、障害物を感知するとよける動作をおこなう | |
| 使用部品 | DC/DCコンバーター | 9V → 6V 降圧 |
| 9V電池 ×2 | モーター駆動用とマイコンボード駆動用の2つ | |
| Arduino UNO | マイコンボード、動作電圧7V、内部LDOあり | |
| LED ×2 | 装飾用 | |
| SG90-HV ×2 | サーボモーター:Arduinoへ入力 | |
| HC-SR04 | 超音波センサー:Arduinoへ入力 | |
| フォトトランジスター ×2 | ライン検知用:Arduinoへ入力 | |
上記内容ではわかりづらい点があると思いますので、図8の電源の流れ、図9の信号系のつながりを図で表しました。
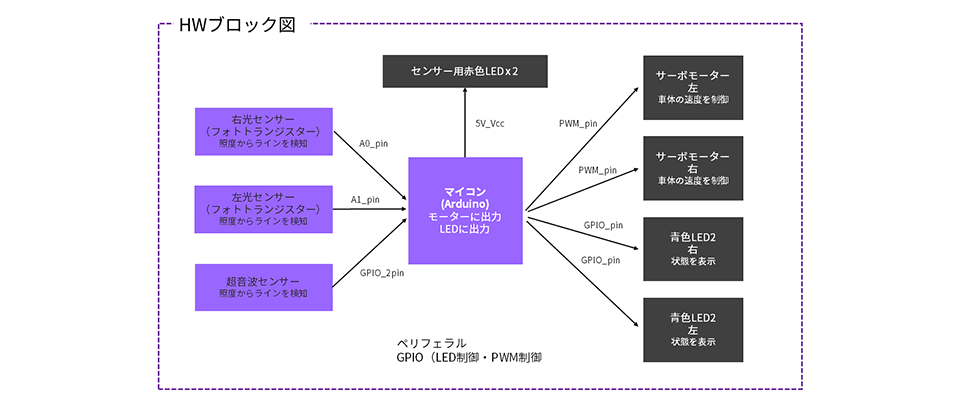
図8:ハードウェア (HW) ブロック図
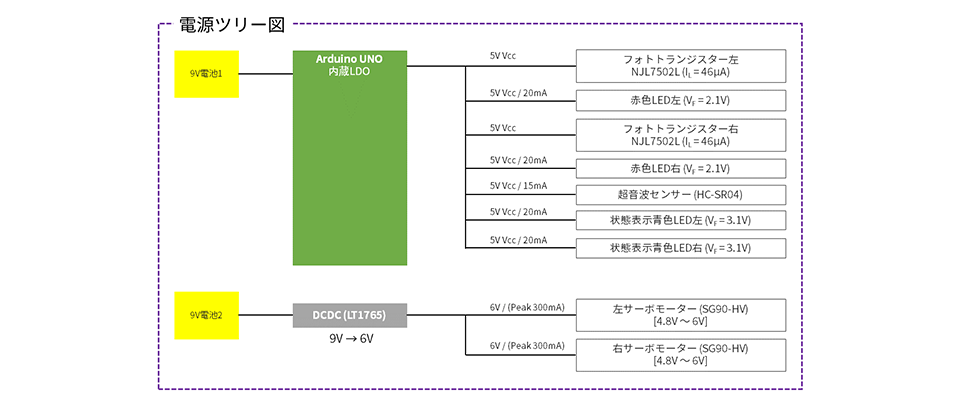
図9:電源ツリー図
ライントレースカーの動き
軽くではありますが、本ライントレースカーの動きを説明します。
左右のフォトトランジスターで黒線を読み取り、その情報をArduinoに入力します。その情報をもとに左右のサーボモーターの速度をArduinoで調整することで黒線をたどるような動きをします。障害物は、超音波センサーで検知し、情報はArduinoに入力します。
2つの電池うち、1つはArduinoに直接に入力し、Arduinoが駆動するために使用されます。もう1つは、サーボモーターの駆動用に使われます。Arduinoの各種ピンから部品の電力を賄うことができますが、サーボモーターの駆動用には足りないので、電池から供給しています。
基板作成のこだわり
図にあるような部品は、1枚の基板に収めてできるだけ本体を小さくしたいのが私のこだわりです。Arduinoはマイコンボードなので、基板として出来上がっている状態です。そのため、それ以外の周辺部品やコネクターなどすべてを電源回路と一緒に搭載する予定です。作成した基板は、次回お見せできればと思います。
次回
全4回のうち3回が終わりました。電源基板までが完成し、残りは周辺部品を載せたのちにプログラムを書き込んで実際に動くか実験をしていきます。ライントレースカーも残りは形にしていくだけです。現段階で製作実習から電源基板を作成したことで電源を学べたことがとても大きいです。私は昔から工作が好きな人間だったので残りも楽しもうと思います。
以上、新米エンジニア山のフドウの記念すべき3話目でした。
電源から作るライントレースカー記事一覧
・ライントレースカーの回路実装編