- 半導体事業HOME
- マクニカの製品・サービス
-
技術情報

-
イベント・セミナー
- 取扱メーカー
- サポート
- お問い合わせ
- 製品購入はこちら
- 半導体事業のメルマガ登録
![]()
![]() 条件を指定して絞り込む
条件を指定して絞り込む
現在2183件がヒットしています。check

本記事では、不揮発性と高速性を両立する次世代メモリー「MRAM」について解説します。
第3章「検証データ編」では、磁場環境におけるMRAMの適用性を評価するため、モーターおよびインダクターの磁束密度について実測調査を行いました。磁場発生源近傍から一定距離における磁束密度を測定した結果を示し、その影響について考察します。
第1章、第2章は下記リンクからご覧いただけます。
第1章「基礎編」:MRAMの基本原理や特長、従来メモリーとの違い、用途についてわかりやすく紹介します。
第2章 「応用編」:磁場環境におけるMRAMの適用性について詳しく解説します。
磁束密度の実測調査(ルネサスエレクトロニクス株式会社調べ)
モーターおよびインダクターの磁束密度の実測調査結果をまとめます。
磁場発生源近傍から一定距離までの磁束密度について、ガウスメーターによる実測結果を中心に示しています。
No.1 モーター
① 低電圧モーター
低電圧クラスの小型BLDCモーター(24V~36Vクラス)を対象に、停止時および動作時の磁束密度を測定しました。評価には、複数のモーターを用いています。
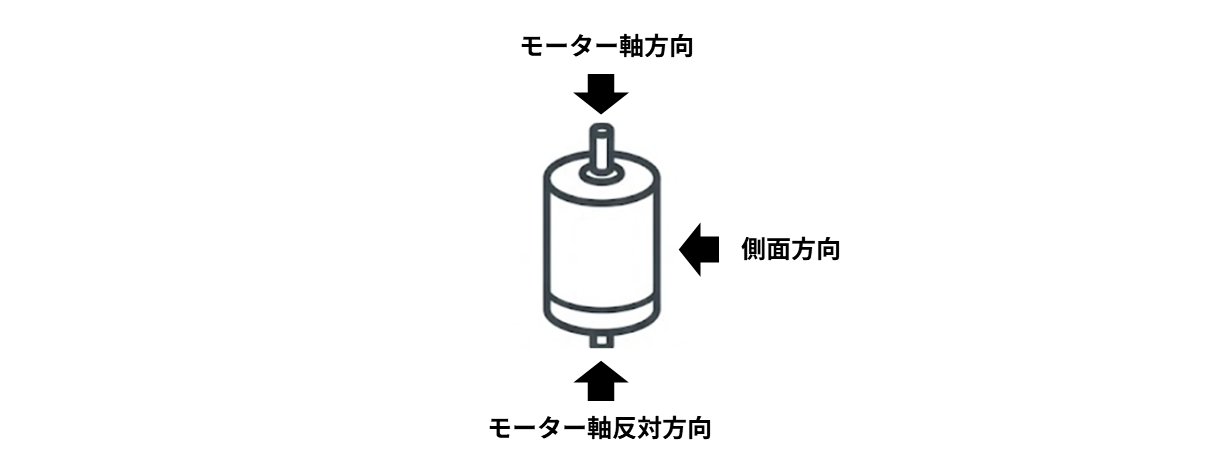
図1:低電圧モーターイメージ(画像制作者:ルネサスエレクトロニクス株式会社様、制作方法:Microsoft 365 Copilot によるAI作成画像)
測定したモーターの性能
・電圧:24V~36V
・定格出力:約10W~30W
・回転数:数千rpm
測定結果
モーター筐体の外部において、停止時・動作時ともに磁束密度は 2ガウス未満 でした。測定方向(側面、軸方向、軸反対方向)による差もほとんど確認されていません。
|
測定条件 |
側面方向 |
モーター軸方向 |
モーター軸反対方向 |
|||
|
0mm |
3mm |
1mm |
3mm |
1mm |
3mm |
|
|
モーター(停止時) |
<2 |
<2 |
<2 |
<2 |
<2 |
<2 |
|
モーター(動作時、20mA) |
<2 |
<2 |
<2 |
<2 |
<2 |
<2 |
|
モーター(動作時、400mA) |
<2 |
<2 |
<2 |
<2 |
<2 |
<2 |
※距離(0/1/3mm)は、ガウスメーターのプローブ先端とモーター筐体表面の離隔(0mm=接触)
考察・まとめ
これらのモーターは鉄製筐体で全体が覆われており、筐体自体が磁気シールドとして機能しています。モーター設計において漏れ磁束は効率低下の要因となるため、外部に磁場が漏れにくい構造となっています。
よって低電圧モーター周辺の磁場は非常に小さく、MRAMを近傍に設置しても影響はないと考えられます。
② 高電圧モーター
産業用途を想定した高電圧モーターについて、主に停止時の磁束密度を測定しました。
図2:高電圧モーターイメージ
測定結果
モーター筐体外部での磁束密度は 2ガウス未満 であり、よりサイズが大きい定格電圧が高い場合でも有意な磁場は観測されませんでした。
考察・まとめ
高電圧モーターにおいても、鉄製筐体による高い磁気シールド効果により、磁束は筐体内部に閉じ込められています。
よって高電圧モーター周辺の磁場も非常に小さく、MRAMを近傍に設置しても影響はないと考えられます。
③アウターロータモーター
ドローンなどで使用されるようなアウターロータモーターの磁束密度を測定しました。
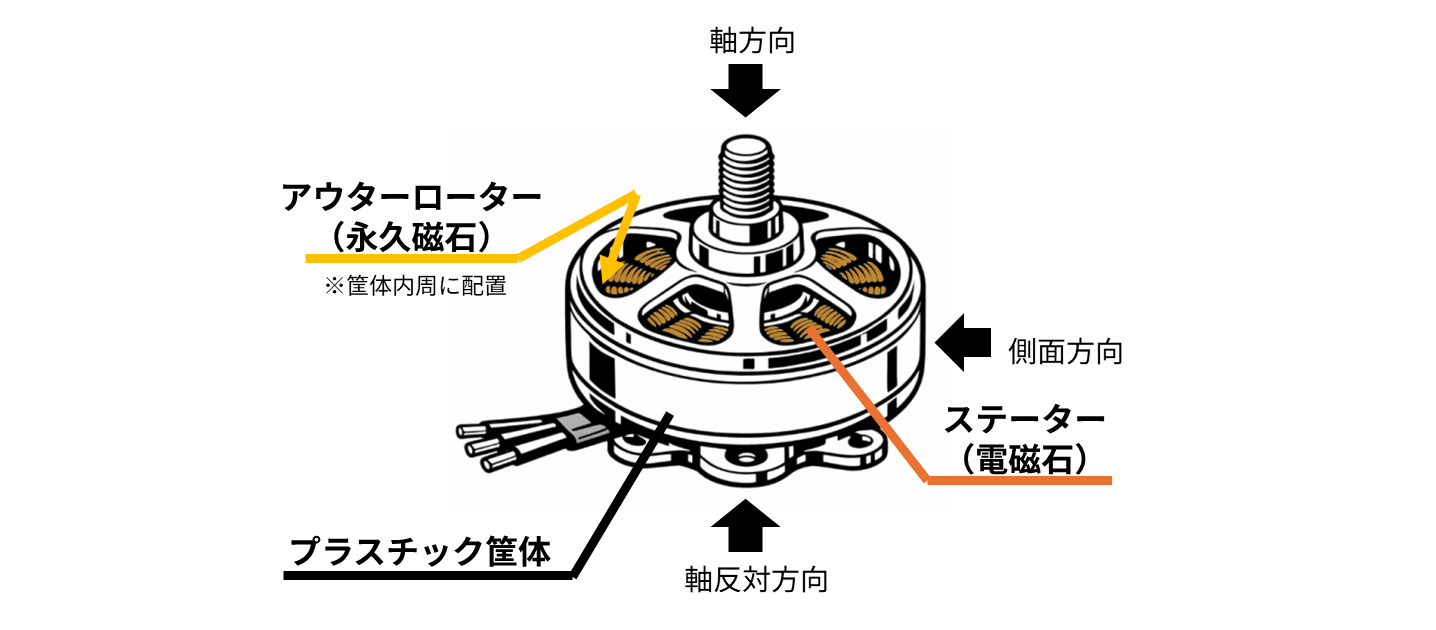
図3:アウターロータモーターイメージ(画像制作者:ルネサスエレクトロニクス株式会社様、制作方法:Microsoft 365 Copilot によるAI作成画像)
測定結果
・側面方向:最大約50ガウス
・軸方向・軸反対方向:約20ガウス
磁石単体では数百ガウス以上の磁場が確認されていますが、側面はプラスチックで覆われており、表面部分でも50ガウス程度となっていました。
考察・まとめ
ドローンは、軽量化のため磁気シールド性のある筐体が用いられない場合も多く、その場合は周囲に漏れ磁束が発生します。しかし、その場合でも数十ガウス程度です。
また、ドローンはモーターと制御基板(MCU搭載)が物理的に離れて配置されるため、距離による磁場減衰により磁場の影響は小さくなります。
構造上は漏れ磁束が存在しますが、実アプリケーションにおいてMRAMへの影響は限定的であると考えられます。
④ 軽量モーター
軽量モーターの磁束密度を測定しました。軽量化を目的として、アルミなど透磁率の低い材料を筐体に用いたモーターでは、鉄製筐体のモーターと比較して、磁気シールド効果が小さくなり、漏れ磁束が大きくなります。
測定結果
・低電流時:磁束密度は検出限界以下
・大電流時:筐体近傍で数十ガウス
考察
今回確認された磁場レベルは MRAMの動作やデータ保持に影響を及ぼすものではありませんでしたが、通常の鉄製筐体モーターと比較すると、アルミなどの透磁率の低い材料は漏れ磁束が増加する点には留意が必要です。
⑤磁気センサー付きモーター
モーターの軸に磁気センサー検出用の磁石を取り付けたモーターの磁束密度を測定しました。
測定結果
・モーター筐体からの漏れ磁束:2ガウス未満
・磁気センサー用磁石:
- 0mm:約14,000ガウス
- 2mm:数100ガウス
- 5mm:約200ガウス
考察・まとめ
モーター本体は磁気シールドされている一方、磁気センサー用磁石は非常に強い磁場源となります。MCUが磁石から数mmの距離に配置される場合、内蔵されたMRAMの耐磁場仕様を超える可能性があります。
よって磁気センサー付きモーターとMRAM搭載MCUを組み合わせる場合、慎重な設計が必要です。
No.2 インダクター
① ギャップ付きインダクター
磁気飽和防止のため、コアにギャップを設けた電源用インダクターの磁束密度を測定しました。
測定結果
ギャップ近傍で最大約10ガウスの磁場漏れが観測されましたが、それ以外の領域では数ガウス以下でした。
考察・まとめ
局所的な磁場漏れはあるものの、MRAMに影響を及ぼすレベルではないと考えられます。
② パワーインダクター
閉磁路構造を持つ、外形が約20mm程度のサガミエレク社製パワーインダクターの磁束密度を測定した結果は次項を参照してください。
インダクターからの漏れ磁束に関するシミュレーション結果(サガミエレク株式会社提供)
サガミエレク株式会社にて、パワーインダクターを対象に、磁場解析シミュレーションによる漏れ磁束の評価が実施されました。
大電流条件下におけるインダクター周辺の磁場分布を調査しています。
対象インダクター
- ①サガミエレク社製パワーインダクターCVK2522H-5R4M
- 透磁率(μ)= 40
- 外形寸法:20 × 25 × 22.5 mm
- インダクタンス値L= 5.4 uH - ②サガミエレク社製フェライトコアインダクター(CVK2522H-5R4Mと同等のサイズかつL値)
- 透磁率(μ)= 3000
- 外形寸法:9 × 16.5 × 22.3 mm
- インダクタンス値L= 5.4 uH
シミュレーション条件
・電流条件
- DC 100A(①にて初期インダクタンス値から L変化率 −30% となる電流値)
・基板条件 - 基板サイズ:75 × 75 × 1 mm
➀CVK2522H-5R4M
➁フェライトコアインダクター
図 4:シミュレーション条件(画像提供者:サガミエレク株式会社 様)
シミュレーション結果
①CVK2522H-5R4M
・X–Y 平面:
磁束密度を 200 ガウスまで低減するには、約 3.0 mm の離隔距離で十分である。
・Y-Z平面:
磁束密度を 200 ガウスまで低減するには、約 1.5 mm の離隔距離で十分である。
②フェライトコアインダクター
・X–Y 平面:
磁束密度は200ガウスを十分下回るレベルであった。
・Y-Z平面:
磁束密度を 200 ガウスまで低減するには、約 0.5 mm の離隔距離で十分である。
|
200ガウス |
|
| ➀ | X-Y平面 3.0mm |
| Y-Z平面 1.5mm | |
| ➁ | X-Y平面 - |
| Y-Z平面 0.5mm | |
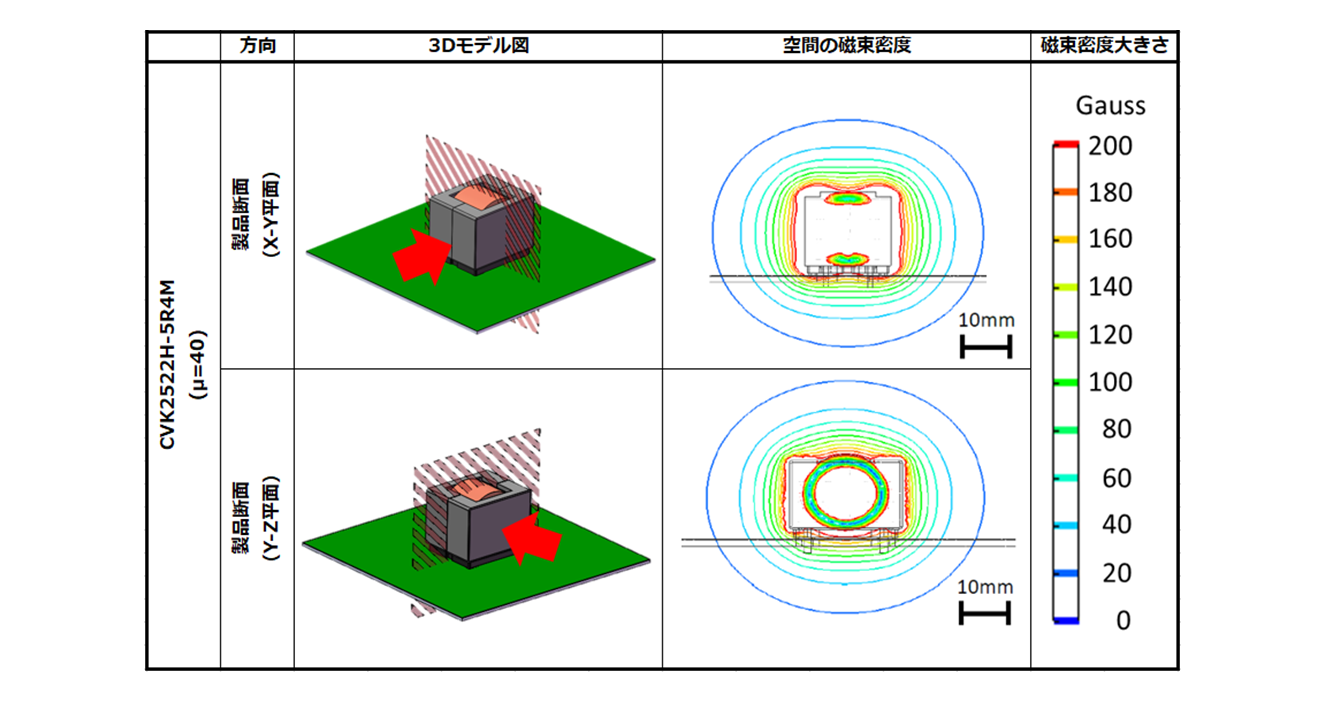
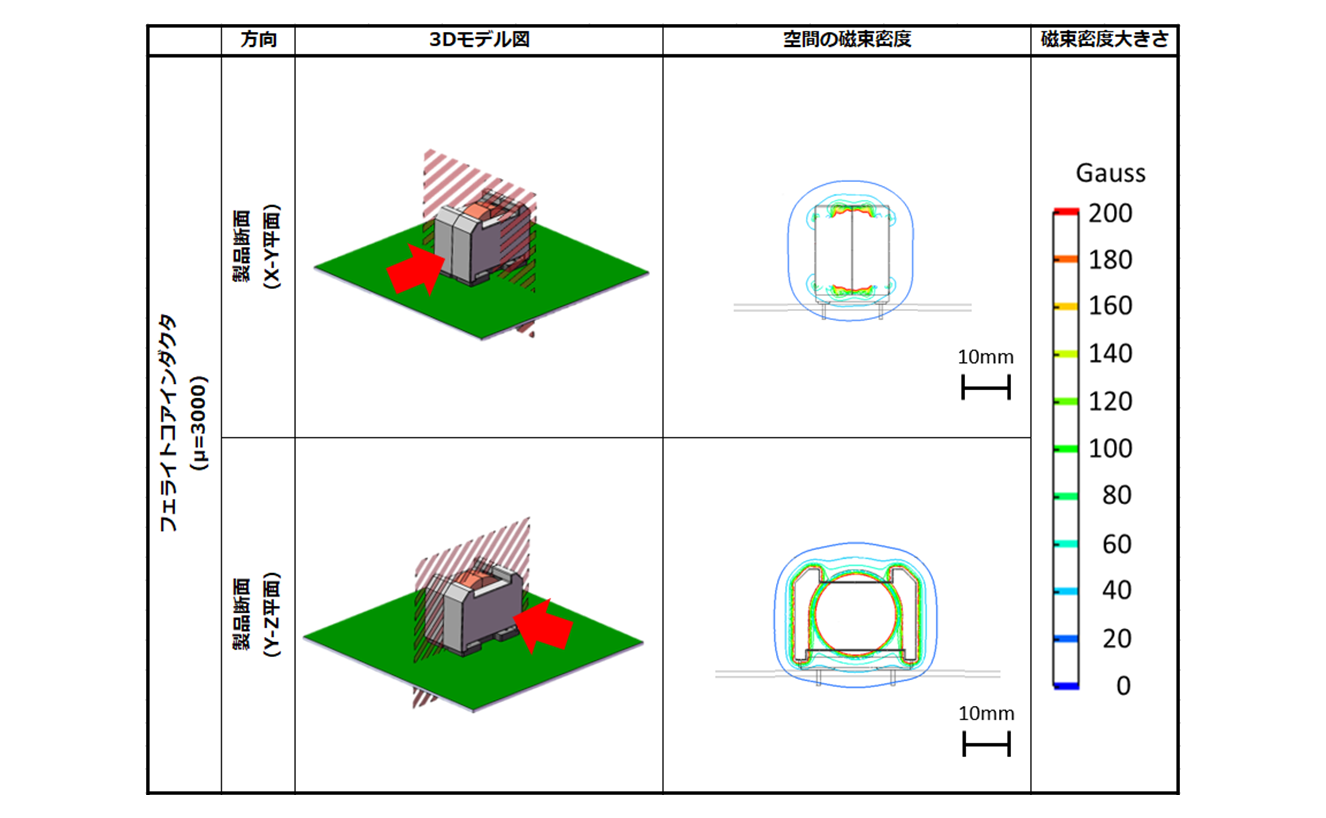
図 5:磁束密度シミュレーション結果(画像提供者:サガミエレク株式会社 様)
評価結果まとめ
・大電流が流れる条件においても、インダクターコアにより磁束の多くが内部に閉じ込められることを確認
・材料の透磁率μによって漏れ磁束の状態は異なり、μが高い材質の方が磁束を内部に閉じ込められる傾向がある
・インダクター周辺に漏れる磁束は限定的であり、MRAMの動作に影響を与えるレベルではない
一般的な電源回路においてインダクターとMRAM内蔵MCUを適切な距離で配置すれば、磁場の影響は十分に抑えられる、という設計上の指針を裏付けるデータの一例となりました。
インダクター近傍では磁場が集中するものの、距離とともに急速に減衰しており、周辺回路への影響は限定的です。
最後に
本章では、MRAMの磁場影響を実測データに基づいて検証しました。第1章「基礎編」・第2章「応用編」もあわせてご覧いただくことで、より理解を深めていただけます。
お問い合わせはこちら