- 半導体事業HOME
- マクニカの製品・サービス
-
技術情報

-
イベント・セミナー
- 取扱メーカー
- サポート
- お問い合わせ
- 製品購入はこちら
- 半導体事業のメルマガ登録
![]()
![]() 条件を指定して絞り込む
条件を指定して絞り込む
現在2183件がヒットしています。check

はじめに
こちらのページでは、Qualcomm® Robotics RB5 Platform 開発キットでIntel® RealSense™ Depth Camera D435iを試す手順について紹介します。
関連リンク:Qualcomm® Robotics RB5 Platform 開発キットについて

必要なもの:
・ホストPC(Ubuntu 18.04)
・Qualcomm® Robotics RB5 Platform 開発キット
・Intel® RealSense™ Depth Camera D435i
・USB Type-C ケーブル
事前準備
Qualcomm® Robotics RB5 Platform 開発キット自体のセットアップは事前に実施ください。
関連ページ(外部サイトにリンクしています):セットアップ
以下の手順の中でQualcomm® Robotics RB5 Platform 開発キットをインターネットに接続しますので、Set up networkまで完了している必要があります。
依存パッケージのインストール
Qualcomm® Robotics RB5 Platform 開発キット上でIntel® RealSense™ SDKをビルドします。
ホストPCとQualcomm® Robotics RB5 Platform 開発キットをUSB Type-C ケーブルで繋ぎ、adbを用いて開発キットへログインします。
必要な依存パッケージをQualcomm® Robotics RB5 Platform 開発キットへインストールします。
hostPC$ adb shell
# apt-get update
# apt-get install git libssl-dev libusb-1.0.0-dev pkg-config libgtk-3-dev
# apt-get install libglfw3-dev libgl1-mesa-dev libglu1-mesa-dev
# apt-get install cmake sudoIntel® RealSense™ SDKのダウンロード
続けて、Qualcomm® Robotics RB5 Platform 開発キット上でIntel® RealSense™ SDKをダウンロードします。
# mkdir /home/src
# cd /home/src/
# git clone https://github.com/IntelRealSense/librealsense.gitIntel® RealSense™ SDKのビルドとインストール
ダウンロードが完了したら、Qualcomm® Robotics RB5 Platform 開発キット上でIntel® RealSense™ SDKのビルドとインストールを行います。
# cd librealsense
# ./scripts/setup_udev_rules.sh
# mkdir build && cd build
# cmake ../ -DBUILD_EXAMPLES=true -DFORCE_RSUSB_BACKEND=true -DBUILD_GRAPHICAL_EXAMPLES=false
# make uninstall && make clean && make && make installIntel® RealSense™ SDKのサンプルアプリケーションの実行
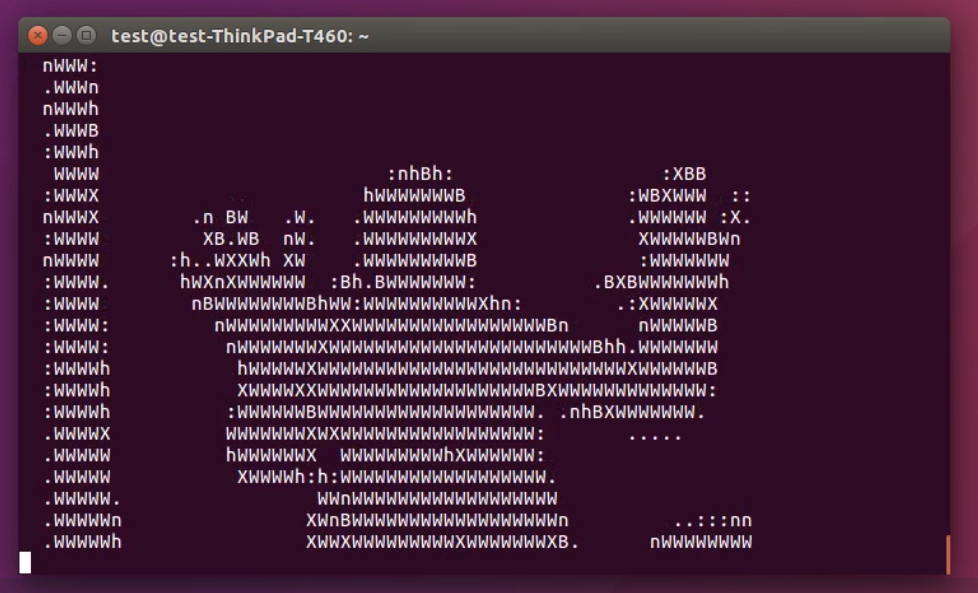
Qualcomm® Robotics RB5 Platform 開発キット上でDepth Mapを取得するサンプルアプリケーションを実行します。
# rs-depth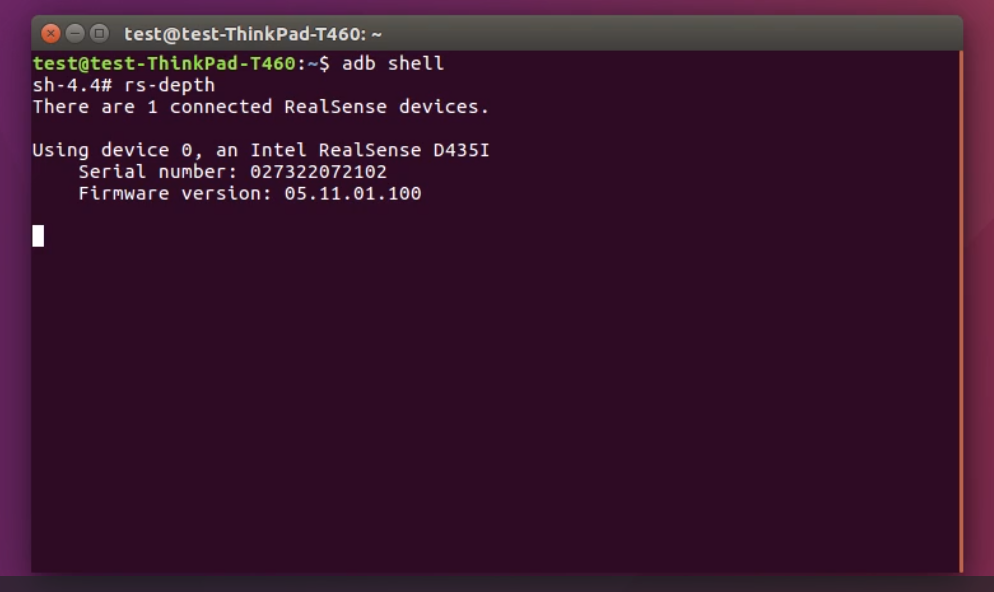
お問い合わせ / お見積り
製品に関するお問い合わせ、開発キットのお見積りは以下リンクよりご用命ください。
Qualcomm メーカー情報Topへ
Qualcomm メーカー情報Topページへ戻りたい方は、以下をクリックください。

