- 半導体事業HOME
- マクニカの製品・サービス
-
技術情報

-
イベント・セミナー
- 取扱メーカー
- サポート
- お問い合わせ
- 製品購入はこちら
- 半導体事業のメルマガ登録
![]()
![]() 条件を指定して絞り込む
条件を指定して絞り込む
現在2153件がヒットしています。check
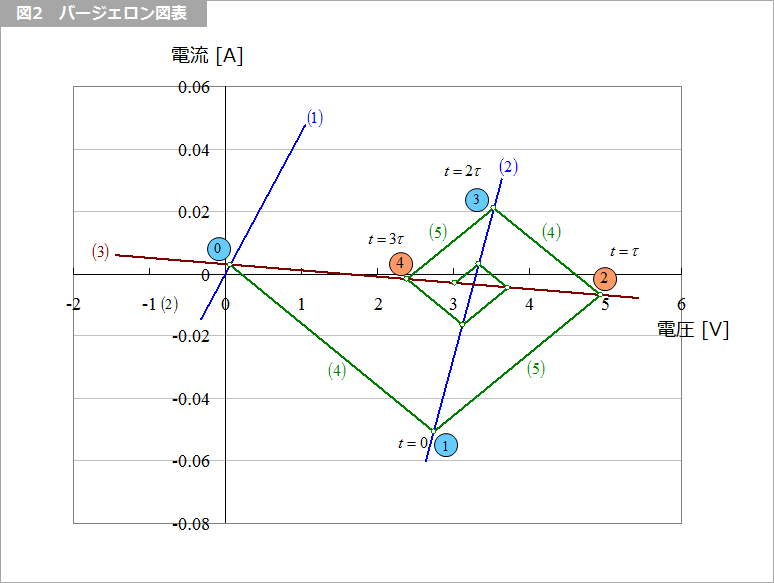
バージェロン(Bergeron)図表
バージェロン図表とは、ドライバとレシーバの電圧と電流の関係を与えて、反射を解析する方法です。非線型でも解析が可能です。(『IBISモデルを用いた反射の解析 ~その2』も参照ください。)
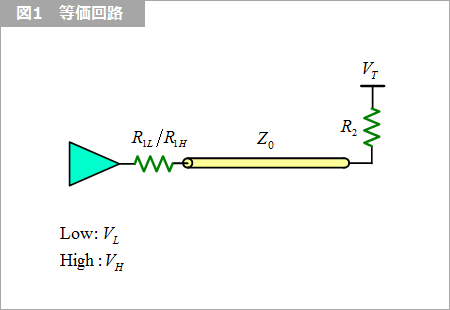
今回は 図1 に示すように、ドライバの特性とレシーバの特性(終端抵抗を含む)を線型とした場合の具体的な計算方法について述べます。電流の向きは、ドライバに流れ込む向きを正(プラス)とします。
ドライバの特性
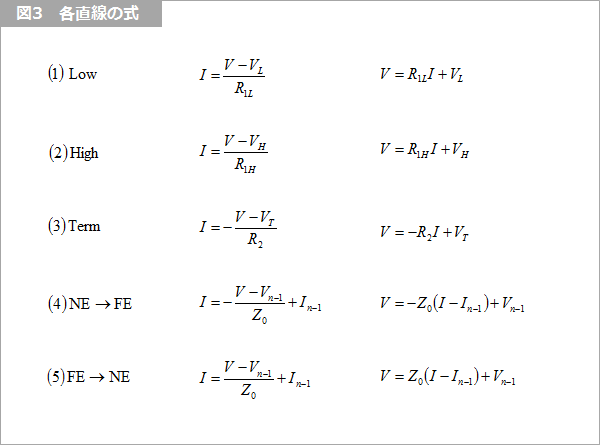
出力抵抗を R1 とし、ハイレベルを VH、ローレベルを VL とします。CMOS の場合、一般的に VH は Vcc、VL は 0(ゼロ)です。ドライバの出力抵抗のロー側を R1L、ハイ側を R1H とします。このとき、出力の特性は、図2 の直線(1) と直線(2) なので、図3 の式(1) と式(2) に対応します。図3 の式の左側は電流の式、右側は電圧の式です。両者は同じ式で、左辺を電流にするか電圧にするかの違いだけです。
レシーバ(終端を含む)の特性
終端抵抗を R2(開放は R2=∞)、終端電圧を VT とすると、図2 の直線(3) となり、図3 の式(3) と表されます。開放の場合は、I=0 となります。
傾き ±1/Z0 の直線
線路の特性インピーダンス Z0 の右下がりか左上がりの直線ですが、縦軸が電流、横軸が電圧なので、傾きは ±1/Z0 となります。各動作点を通り、傾き ±1/Z0 の直線は、図2 の直線(4) と直線(5) であり、図3 の式(4) および式(5) で表されます。
ローからハイに変化(立ち上がり)する場合を考えます。
初期値
図2 の直線(1) と直線(3) との交点なので、図3 の式(1) と式(3) を連立方程式で解くと、図2 の 0 および 図4 の 0 を得ます。(それぞれ○に 0)です。
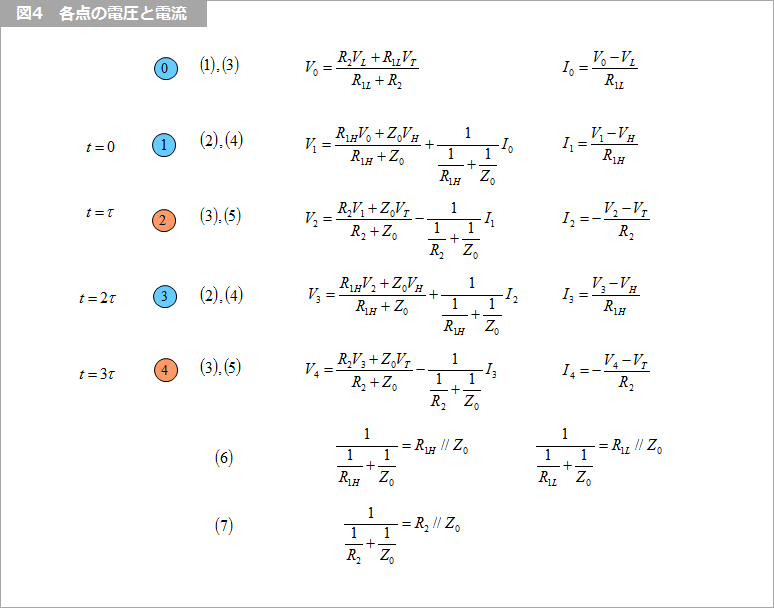
t=0
ドライバが VL から VH に変化します。このときのドライバの出力抵抗は、ロー側が R1L でハイ側が R1H です。もちろん同じ値でも構いません。初期値 0 を通り、傾き -1/Z0 の直線(4) と、直線(2) との交点を求めると、図2 の①および 図4 の①を得ます。この点が、信号が立ち上がってすぐのドライバの振幅です。
t=τ
立ち上がった信号が遠端に進みます。①の点を通る傾き 1/Z0 の直線(5) と、遠端の直線(3) の交点が t=τ (ギリシャ文字小文字のタウ)の点で、図2 の②および 図4 の②です。
t=2τ
遠端から近端に反射が向かいます。②を通る傾き -1/Z0 の直線(4) と近端の(2) の直線の交点が t=2τ の点で、図2 の③および 図4 の③です。
t=3τ
同様に、③を通る傾き 1/Z0 の直線(5) と、遠端の(3) の直線の交点が t=3τ の点で、図2 の④および 図4 の④です。
t=4τ 以降も、τ の奇数倍と偶数倍に分けて考えると繰り返しで求めることができます。
ハイからローに変化(立ち下がり)する場合は、抵抗と電圧を、R1L⇔R1L、VH⇔VL と入れ換えます。
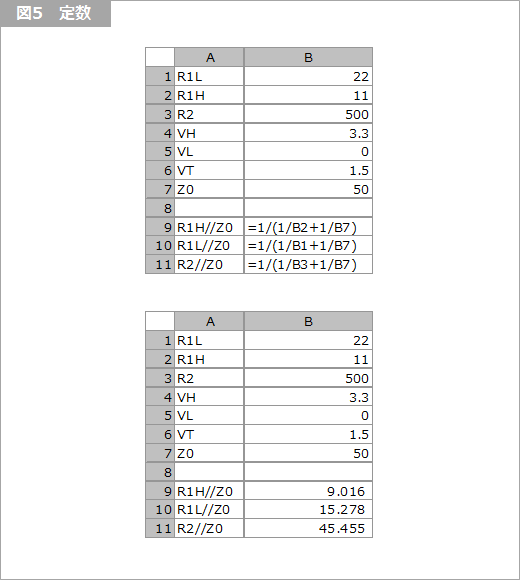
定数
図4 の各式には共通の係数があります。①および③の I0 および I2 の係数は、図4 の式(6) に示すように、R1H と Z0 の並列接続です。同様に、②と④の I1 および I3 の係数は、式(7) に示すように R2 と Z0 との並列接続です。これらは毎回計算しなくてよいように、図5 のように、あらかじめ定数として計算しておきます。図5 には、上に数式を、下に数値を示します。
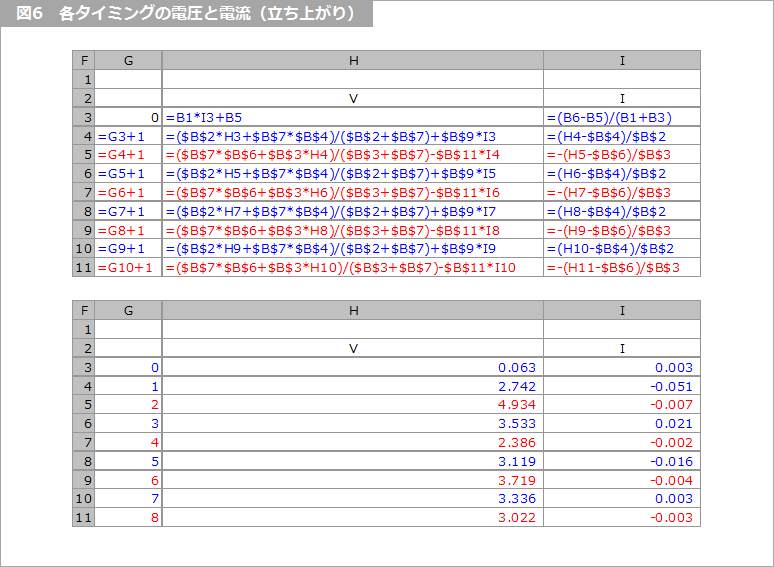
式
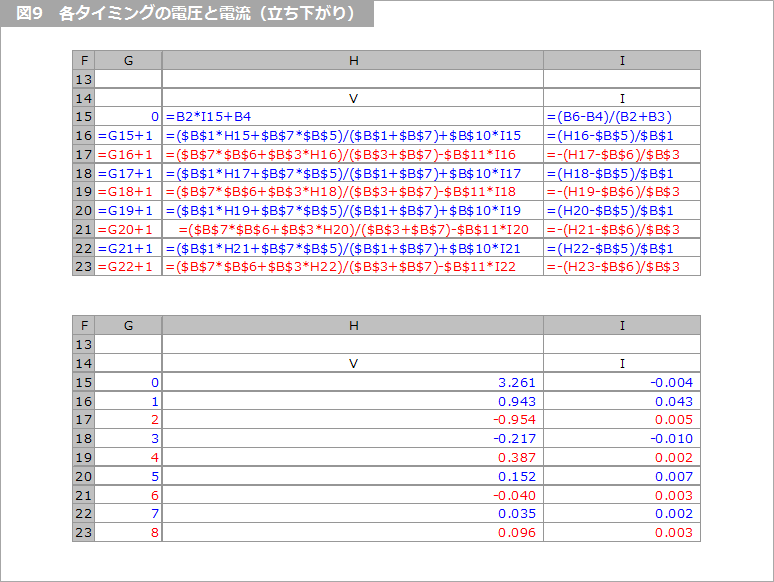
図6 に示すように、図4 の式をエクセルに書き込みます。図4 の○付きの数字とセルの文字色とを合わせています。G列は τ です。図6 の H列と I列とで散布図を描くと冒頭の 図2 のバージェロン図表となります。立ち下がりについても同様に、図6 に対応して、図9 を求めます。
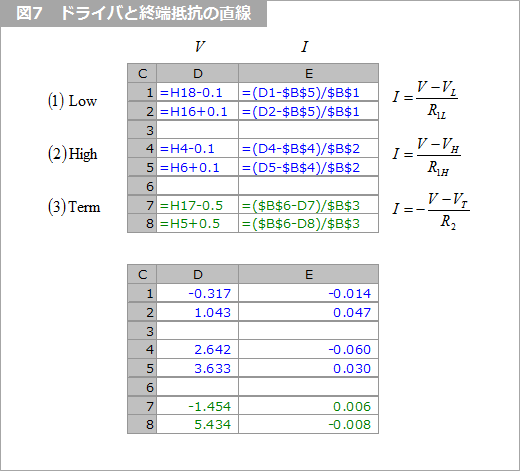
ドライバと終端抵抗の直線は、図7 の D列と E列で散布図を描きます。なお、これらの直線の X軸(電圧)の下限と上限は、
ドライバ(ロー)の下限:立ち下がりの 3τ の点 -0.1
ドライバ(ロー)の上限:立ち下がりの 0τ の点 +0.1
ドライバ(ハイ)の下限:立ち上がりの 3τ の点 -0.1
ドライバ(ハイ)上限:立ち下がりの 0τ の点 +0.1
終端抵抗の下限:立ち下がりの 1τ の点 -0.5
終端抵抗の上限:立ち上がりの 1τ の点 +0.5
としています。±0.1 や ±0.5 は、グラフの出来栄えをみて変更してください。
近端と遠端の時間軸ごとに電圧に分ける
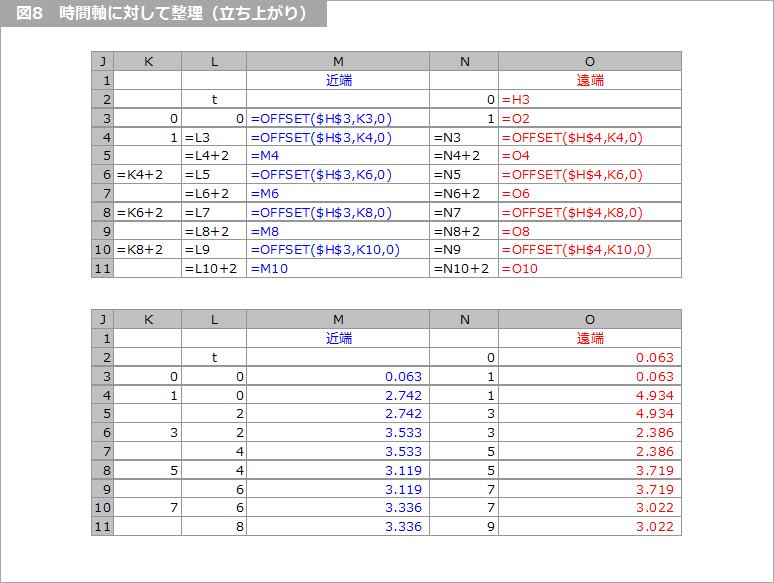
図6 で求めた各点の電圧を 図8 のように時間軸に対して整理します。K列は Offset 関数のインデックスです。
時間軸は、『格子線図』のときと同じ方法を用います。近端の波形は、図8 の L列と M列とを散布図でグラフ化します。遠端は同様に、N列と O列です。その結果が、冒頭の 図2 です。
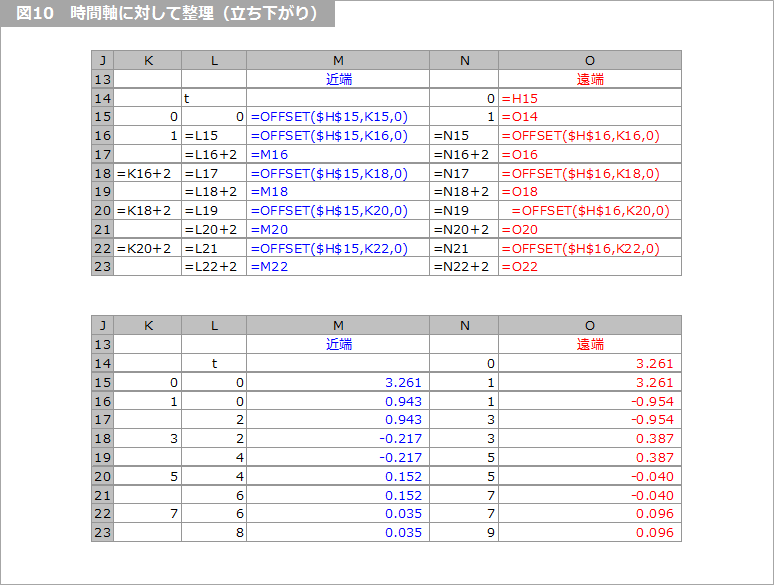
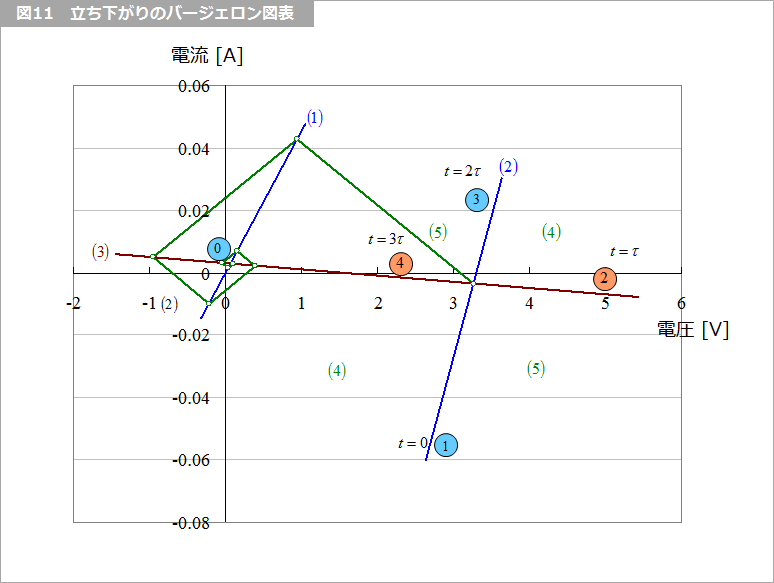
立ち下がりについても同様に、立ち上がりの 図8 に対して 図10 を求めます。図11 に作成したグラフを示します。
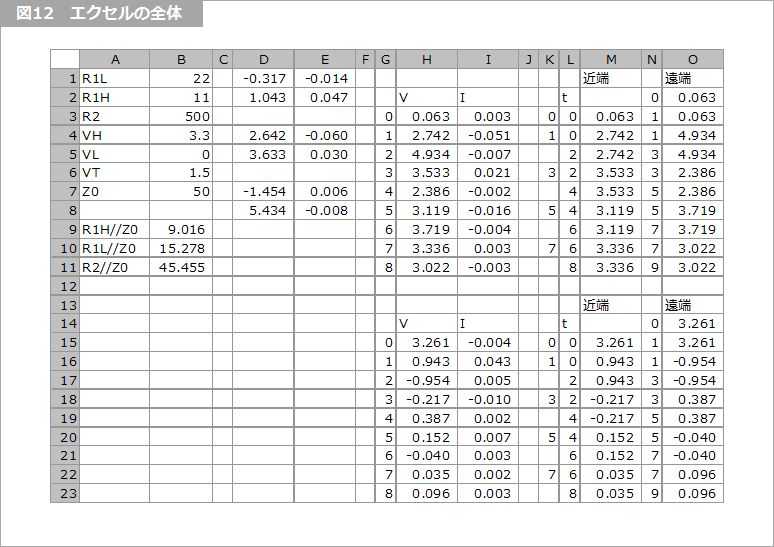
エクセルの全体を 図12 に示します。
碓井有三のスペシャリストコラムとは?
基礎の基礎といったレベルから入って、いまさら聞けないようなテーマや初心者向けのテーマ、さらには少し高級なレベルまでを含め、できる限り分かりやすく噛み砕いて述べている連載コラムです。
もしかしたら、他にも気になるテーマがあるかも知れませんよ!