- 半導体事業HOME
- マクニカの製品・サービス
-
技術情報

-
イベント・セミナー
- 取扱メーカー
- サポート
- お問い合わせ
- 製品購入はこちら
- 半導体事業のメルマガ登録
![]()
![]() 条件を指定して絞り込む
条件を指定して絞り込む
現在2183件がヒットしています。check

差動伝送のパターン設計については、何となく設計しているけどこれで正しいのか、少し自信がないという声を耳にします。差動伝送にはいろいろな用語が混在し、混同して使われていることがあり、要求項目が何か明確になっていないこともあるようです。以下に、これらを整理してみることとします。
差動伝送のパターンの目標値
シングル伝送の場合の目標値は、特性インピーダンス Z0 とクロストーク係数 ξ の 2つです。差動伝送の場合は、特性インピーダンス Z0 と差動インピーダンス Zdiff、およびチャネル間のクロストーク係数の 3つです。ただ、用語が必ずしも統一されてないので、迷ったり間違ったりします。
(ξ:ギリシャ文字小文字のクサイ)
用語の間の関係
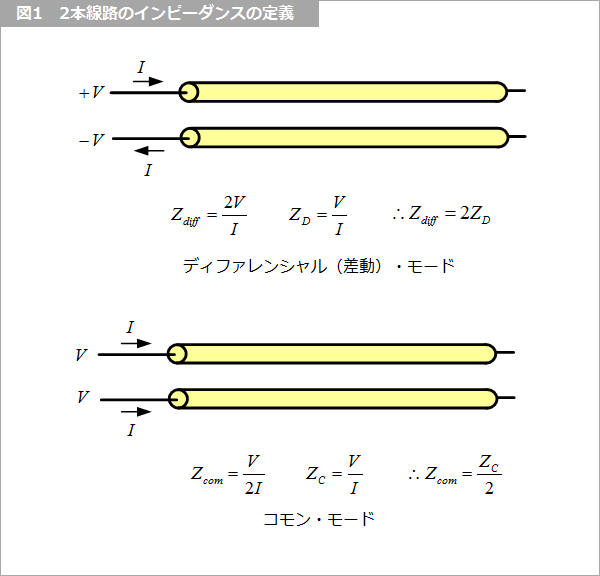
差動伝送(2本線路)の場合のインピーダンスの定義を 表1 に示します。特に、(b) と (c) はわかりにくいので、定義を 図1 に示します。
| 項 | 名 称 | 記号 | 意 味 | 例 | 関係式 |
| (a) | 特性インピーダンス | Z0 | 1本の線路の特性インピーダンス | 50 | Z0≅ZCZD |
| (b) | 差動インピーダンス | Zdiff | 2本線路に逆相の信号を加えたときの線間のインピーダンス | 85 | Zdiff=2ZD |
| (c) | コモン・インピーダンス | Zcom | 2本線路をつないで信号を加えたときのインピーダンス | 29.4 | Zcom=ZC2 |
| (d) | ディファレンシャル・モードのインピーダンス | ZD | 2本線路に差動信号を加えたときの1本の線路のインピーダンス | 58.8 | ZD≅1-ξ1+ξ×Z0 |
| (e) | コモン・モードのインピーダンス | ZC | 2本線路に同相信号を加えたときの1本の線路のインピーダンス | 42.5 | ZC≅1+ξ1-ξ×Z0 |
ξ:2本線路間のクロストーク係数
(a) 特性インピーダンス Z0
線路が 1本だけの場合の特性インピーダンス。例えば、50 Ω。
(b) 差動インピーダンス Zdiff
2本の線路間に逆相(差動)の信号を加えたときの線間のインピーダンス。例えば、85 Ω。
(c) コモン・インピーダンス Zcom
2本の線路をつないで共通に信号を加えたときのインピーダンス。
(d) ディファレンシャル・モードのインピーダンス ZD
2本線路に差動信号を加えたときの 1本の線路のインピーダンス。
(e) コモン・モードのインピーダンス ZC
2本線路に同相信号を加えたときの 1本の線路のインピーダンス。
以上のうち、(b) と (d) とが混同されて誤って用いられたり、(c) と (e) とが混同されることがあります。ZC と ZD とは、2本線路のパラメータとして、クロストーク解析の場合に用いられます。両者の関係は、ZC > ZD です。(b) の Zdiff は Zdiff = 2 × ZD で、(c) の Zcom は Zcom = ZC ÷ 2 であり、通常は、Zdiff > Zcom です。また、(a) の Z0 は (d) の ZD と (e) の ZC を用いて、Z0 ≒ √(ZC × ZD) で表されます。
差動インピーダンスの要求値
>通常、85 ~ 100 Ω 程度です。PCI-Express (PCIe) が 策定された初期の Zdiff は、100 Ω でした。なぜ 100 Ω になったかは当初から私は非常に疑問に思っていて、ボード設計の専門家が規格策定に深くかかわっていたらもう少し低いインピーダンスになっただろうと思っていました(脚注1)。たぶん、測定器が 50 Ω なので、1本当たり 50 Ω、2本で 100 Ω からきたのではないかと推測します。
実際に、Zdiff = 100 Ω を設計してみると、その困難さが理解できると思います。その後、85 Ω も「許容」されるようになりましたが、私はこちらが本筋だと思っています。なお、USB は Zdiff = 90 Ω です。
設計の手順
要求値としては 2項の項目のうち、(a) の Z0 と (b) の Zdiff を指定されるのが一般的です。他のパラメータを指定された場合にも、2項の変換式により (a) の Z0 と (b) の Zdiff に変換できます。チャネル間の結合のパラメータとして、クロストーク係数 ξ23 もあらかじめ決めておきます。
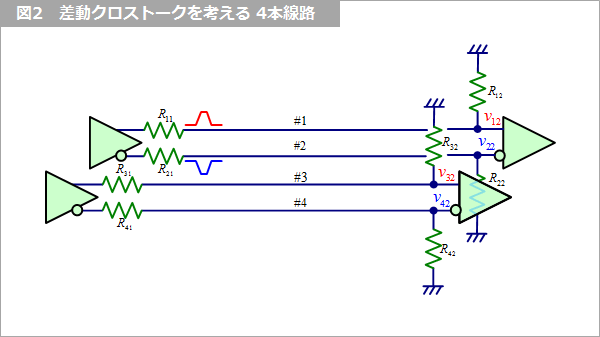
図2 に示す 2対の差動線路、すなわち 4本線路に順に #1 ~ #4 の番号を振り、線路 #1 と線路 #2 を加害者線路対とし、線路 #3 と線路 #4 の被害者線路を前提とします。
(1) Z0 の決定
線路 #1 が単独に存在する場合の単独線路のインピーダンスなので、簡単に決定できます。
(2) Zdiff の決定
線路 #1 と線路 #2 または、#3 と #4 の差動線において、目標の Zdiff になるように 2本線路の間隔を決定します。
(3) チャネル間のクロストーク係数 ξ23
チャネル間のクロストーク係数 ξ23 は、線路 #2 と線路 #3 との間のクロストーク係数です。目標のクロストーク係数 ξ23 になるように、チャネル間の間隔を決定します。
クロストーク係数とクロストークとの関係は、場合にわけて考えます。
(a) 近端クロストーク
加害者信号と被害者信号の信号の向きが逆の近端クロストークは、クロストーク係数にほぼ比例します。一般のシングル伝送がほぼクロストーク係数の 1/2 であるのに対し、差動伝送のクロストークはクロストーク係数の 0.4 倍程度で、少し小さめです。
(b) 遠端クロストーク
加害者信号と被害者信号とが同じ向きの遠端クロストークは、表面層と中間層とで傾向が異なります。
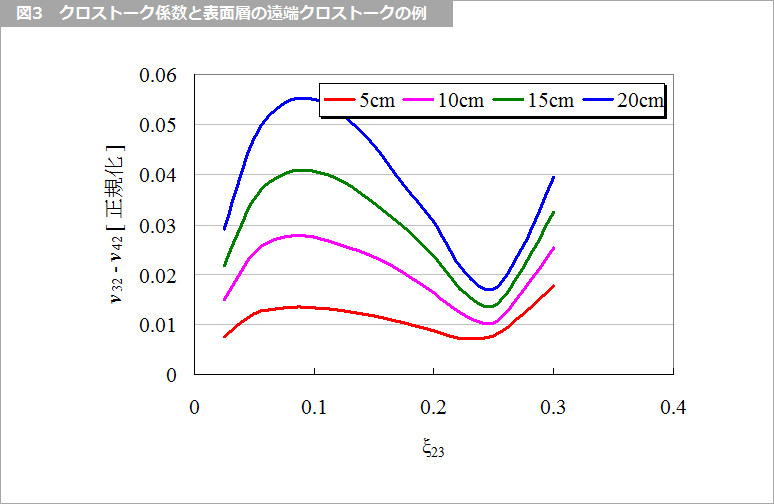
[i] 表面層
表面層の遠端クロストークは、4つの伝搬モードの遅延時間の差によるヒゲ状のクロストークが支配的です。図3 にその一例を示しますが、必ずしもいつもクロストーク係数 ξ23 が小さいほうがクロストークが小さいわけではないので、実際の回路で解析を行っておく必要があります。
[ii] 中間層
中間層の場合は、Hyperbola 終端(脚注2)の条件を満たしているので、クロストークの振幅自体は小さいが、ほぼ ξ23 の 2乗に比例します。
脚注1
日経エレクトロニクス 2002.11.4 p.62 の PCI Express のインタビュー記事
当時は、差動インピーダンスという用語はあまり使われてなくて、上記 2(d) の ZD を単にインピーダンスと呼んでいました。
脚注2
ドライバの出力抵抗を r、遠端の終端抵抗を R としたときの順方向クロストークは、rR = Z0^2 のときにゼロとなる終端を、Hyperbola 終端といいます。
碓井有三:
おすすめ記事/資料はこちら
======================================
碓井有三のスペシャリストコラムとは?
基礎の基礎といったレベルから入って、いまさら聞けないようなテーマや初心者向けのテーマ、さらには少し高級なレベルまでを含め、できる限り分かりやすく噛み砕いて述べている連載コラムです。
もしかしたら、他にも気になるテーマがあるかも知れませんよ!
こちら から他のテーマのコラムも覗いてみてください。