- 半導体事業HOME
- マクニカの製品・サービス
-
技術情報

-
イベント・セミナー
- 取扱メーカー
- サポート
- お問い合わせ
- 製品購入はこちら
- 半導体事業のメルマガ登録
![]()
![]() 条件を指定して絞り込む
条件を指定して絞り込む
現在2189件がヒットしています。check
バスは便利な信号伝送方式です。1本の線路を使って複数の信号を送ります。信号はある範囲内で、どこで受け取っても、どこから送り出してもよいので、使う上では便利です。
ただし、信号伝送の形態としては、あまり性能を上げることはできません。バスに対する概念は 1対1 伝送です。線路を 1本の信号が占有する代わりに、性能を上げることは比較的容易です。
ここでは、何回かにわたって、バス伝送について解説します。
バスは便利だが...
バスの語源はオムニバス(Omnibus)、すなわち、乗合バス(当初は乗合馬車)にまでさかのぼります。
電気の分野では、複数の信号線路上に複数のビットを伝送する形態をいいます。複数の乗客が同じ乗り物に乗るのと似ているところから来ています。バスは、複数のスロットのどこにカードを挿しても動作させることができる便利な伝送形態でした。
バスは便利な反面、SI(シグナルインテグリティ)の観点からは少し難しい面があります。
異なる複数のトポロジーの存在
物理的には同一の接続形態でも、複数の電気的な配線形態、すなわち、トボロジーが存在します。
図1 はそのうちのいくつかを示します。
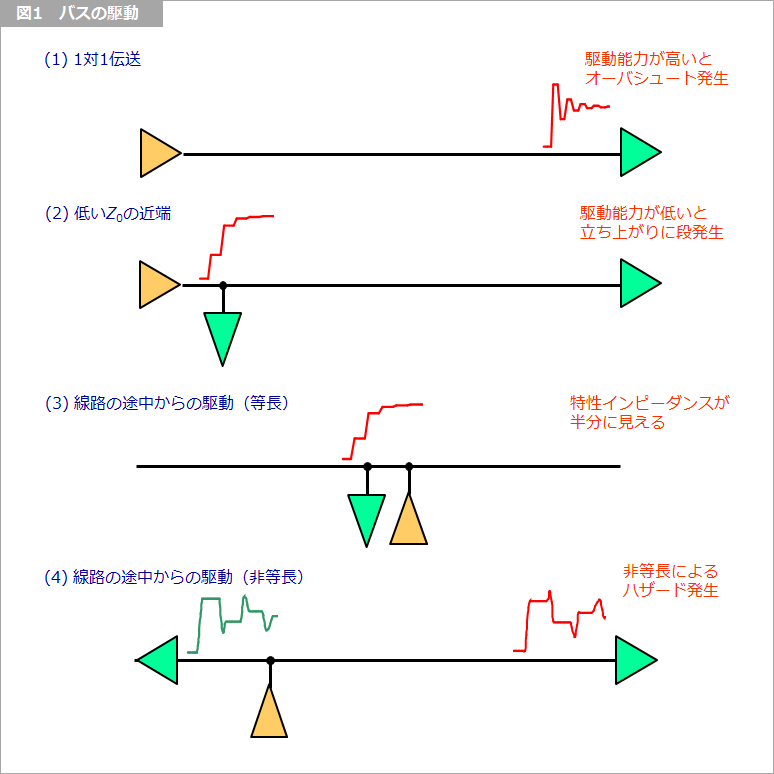
(1) 1対1配線
ドライバの駆動能力が大きいと、オーバシュートとその跳ね返りが生じる。
(2) 最近端にレシーバが存在
ドライバの駆動能力が低いと、立ち上がり波形に段が生じ、遠端からの少なくとも 1往復の反射を待たなければならない。
(3) 線路の中央にドライバとレシーバが接近して存在する場合
ドライバから見ると、線路が並列に接続されたように見え、特性インピーダンスが半分になって、(2) よりもさらに信号レベルが低くなる。
(4) 線路の中央よりも片方に寄った位置にドライバが近接して存在する場合
ドライバから見ると、線路長の異なる 2本の線路に対する 1対2 伝送となり、信号の変化時にヒゲ(ハザード = Hazard)が生じる。
これらを解決するには、近端、遠端ともに整合終端する、いわゆる両終端が必要ですが、TTL の 5 V や LVTTL もしくは CMOS の 3.3 V 振幅では消費電力が増大します。
例えば、50 Ω の線路で両端整合すると、1本当たり 5 V 振幅で 500 mW、3.3 V 振幅で 200 mW にも達します。また、ドライバには極めて大きな駆動能力が要求されるために、従来は必要最小限にしか適用できませんでした。
小振幅バスの登場
従来の論理回路は入力電圧の不感帯が広く、例えば、CMOS IC では 1 ~ 2 V 程度です。この不感帯の広さのために、論理振幅は 50年ほど前に誕生した TTL の 5 V から、つい最近の LVCMOS の 3.3 V まで、それほど大きくは小振幅化は進みませんでした。
ところが 1990年代になり、高速化の要求の高まりに対応して、Pentium の FSB (Front Side Bus) に適用された GTL や Direct Rambus、さらには SSTL のように、信号振幅を 0.8 V 程度に小さくしたバスが登場しました。
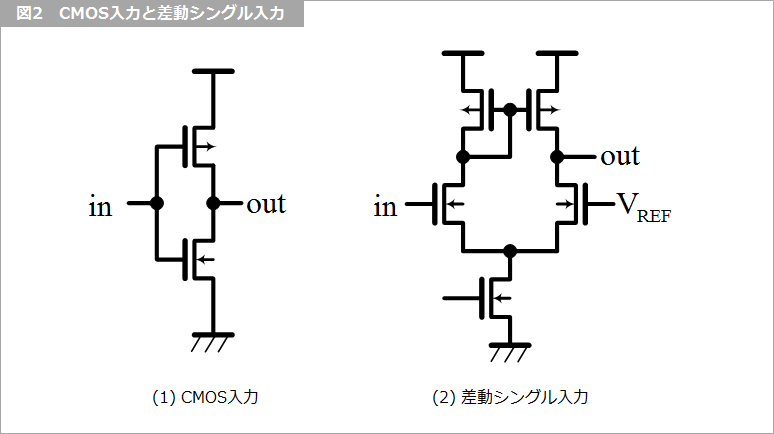
入力の不感帯に対してはどのように対処したか、それは、図2(a) に示すように、従来の CMOS 回路に対して、同図(b) の差動シングル入力を採用したことでした。CMOS 入力に比べて不感帯が非常に小さくなって、小さな振幅でもレシーバで論理を識別できるようになったことでした。
続きは、『バス伝送~その2』をご覧ください。
碓井有三のスペシャリストコラムとは?
基礎の基礎といったレベルから入って、いまさら聞けないようなテーマや初心者向けのテーマ、さらには少し高級なレベルまでを含め、できる限り分かりやすく噛み砕いて述べている連載コラムです。
もしかしたら、他にも気になるテーマがあるかも知れませんよ!