- 半導体事業HOME
- マクニカの製品・サービス
-
技術情報

-
イベント・セミナー
- 取扱メーカー
- サポート
- お問い合わせ
- 製品購入はこちら
- 半導体事業のメルマガ登録
![]()
![]() 条件を指定して絞り込む
条件を指定して絞り込む
現在2191件がヒットしています。check

差動クロストークは難解
差動伝送のクロストークはシングル伝送の場合と比べてかなり難解です。
その理由は、
- シングル伝送のコモン、ディファレンシャルといった 2つのモードの組み合わせではなく、4つのモードを考える必要がある。
- 上記とも関連するが、解析解がシングル伝送の 4元の連立方程式に対して 8元の連立方程式となり、極めて煩雑である。
- シングル伝送は、一般的に、加害者側の線路のパルス幅が線路の往復時間よりも長い場合が多いが、差動伝送はパルス幅が狭い場合が多く、加害者のどのタイミングがクロストークとして表れるか簡単には考えにくい。
- SPICE などのモデルの作成が非常に煩雑である。
などでしょう。
差動信号と一般信号とのクロストークの違い
両者の違いを 表1 に示します。
差動信号は同表の最後行の前提に示すように、一般的に、
- 遠端を整合終端する
- 加害者の信号のパルス幅が狭い
という特徴があります。シングルはこの逆です。
その結果、クロストーク・ノイズのパルス幅が加害者の信号のパルス幅と等しくなります。一般信号は、線路遅延 τ(ギリシャ文字小文字のタウ)の 2倍のパルス幅となります。
遠端を整合終端しているので、クロストークはシングル伝送がゆっくりと収束するのに対し、単発で終わります。ただし、2τ 後に逆相のノイズが表れますが、線長が長いと損失によって 2τ 後のノイズは減衰します。20 ~ 30 cm 程度の USB などは要注意です。
クロストークの影響は一般信号は他のノイズも含めたノイズ・マージンとして考えることが多いですが、差動の場合にはジッタとして寄与するので、小さなノイズでもきちんと考慮しておく必要があります。
| 一般信号のクロストーク | 差動信号のクロストーク | |
| クロストークのパルス幅 | 2τ τ : 線路の遅延 |
TW : 加害者の信号のパルス幅 TW ≧ 2τ の場合は一般信号と同じ |
| 収束性 | ドライバの駆動能力に依存 | 単発 ただし 2τ 後に逆相ノイズ |
| 極 性 | 多くはノイズ源と同じ | 電圧源ドライバ : 正相 電流源ドライバ : 逆相 |
| クロストークの影響 | ノイズマージン Δtpd |
ジッタ (小さくても影響がある) |
| 前 提 | 遠端開放 ある程度広いパルス幅 |
遠端整合 狭いパルス幅 |
差動クロストークの解析
図1 は差動伝送のクロストークの表れ方を示したものです。
加害者線路が #1 と #2 の 2本 1組で、被害者線路が #3 と #4 の 2本 1組です。クロストークは、被害者線路 #3 の遠端の v32 と #4 の遠端の v42 との差を考えます。
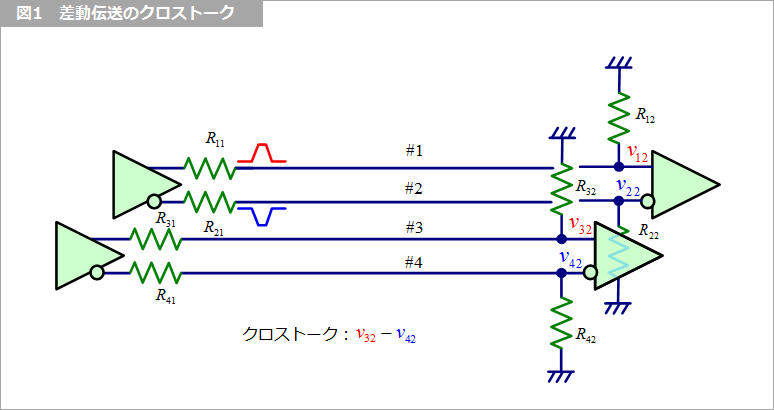
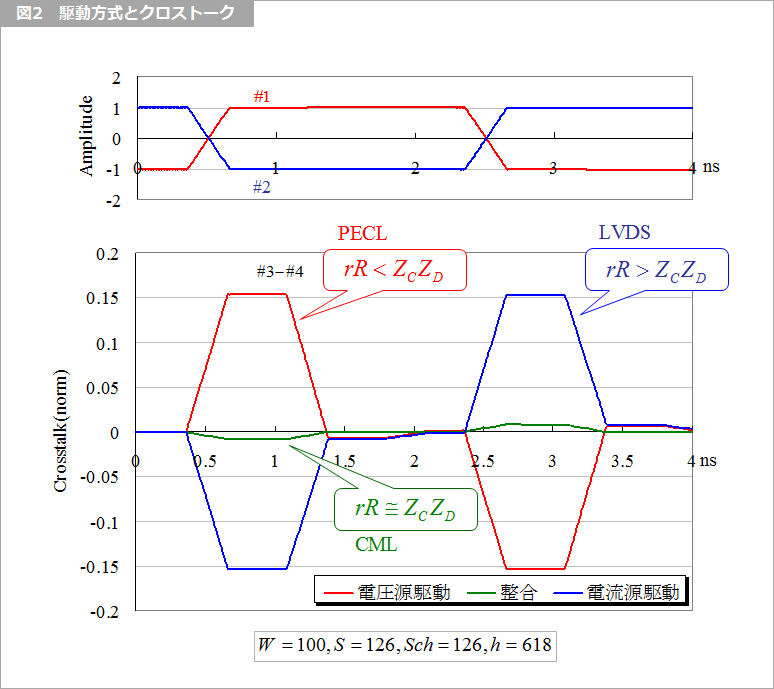
図2 は差動クロストークの解析結果です。
差動伝送のドライバは、電流源ドライバの LVDS、電圧源ドライバの PECL、整合ドライバの CML によってクロストークの極性が異なります。
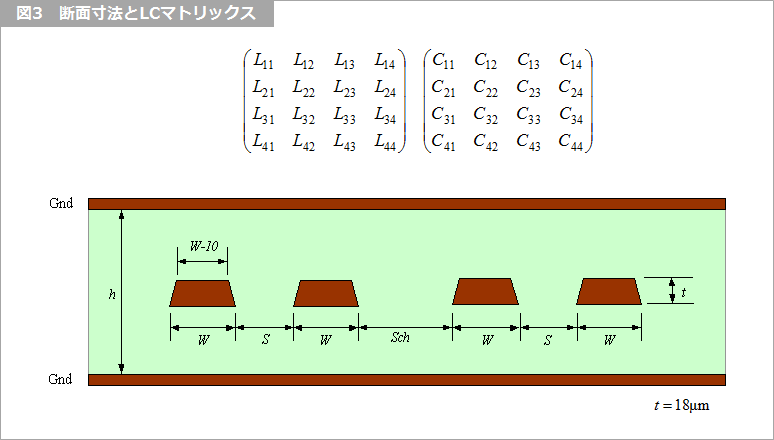
実際に解析するには、図3 の断面構造からフィールド・ソルバを用いて LC マトリックスを求めます。
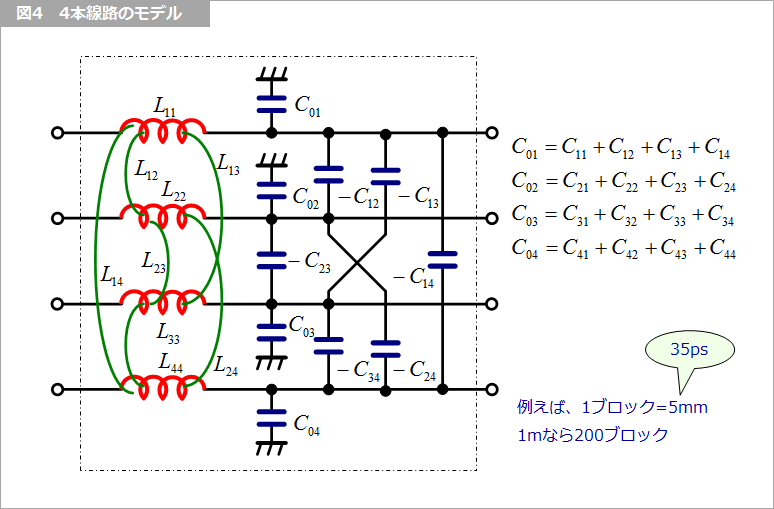
解析は、図4 の等価回路を必要ブロック繰り返して縦続接続して SPICE などの解析ソフトを用いて行います。
この 1ブロックをどの程度の長さにするかは、解析する信号の立ち上がり時間などで決まりますが、同図に示すように 1ブロックを 5 mm とすると、1 m の線長を解析するには 200ブロック接続する必要があります。
1ブロックを短く選ぶと計算量が多くなり、長く選ぶと解析精度が落ちるので、十分なブロックを選ぶ必要があります。
差動クロストークの近似計算
実際の解析は、煩雑なモデル作りと多くの計算量が必要なことは想像できます。これを断面寸法が変わるたびに計算するのは実際的ではないので、もう少し簡単な方法を紹介します。
図5 は加害者線路 2本と被害者線路 2本からそれぞれ 1本ずつを選んで、シングルの 2本線路のクロストークを計算で求めて、4つの組み合わせに対して重ね合わせる方法です。
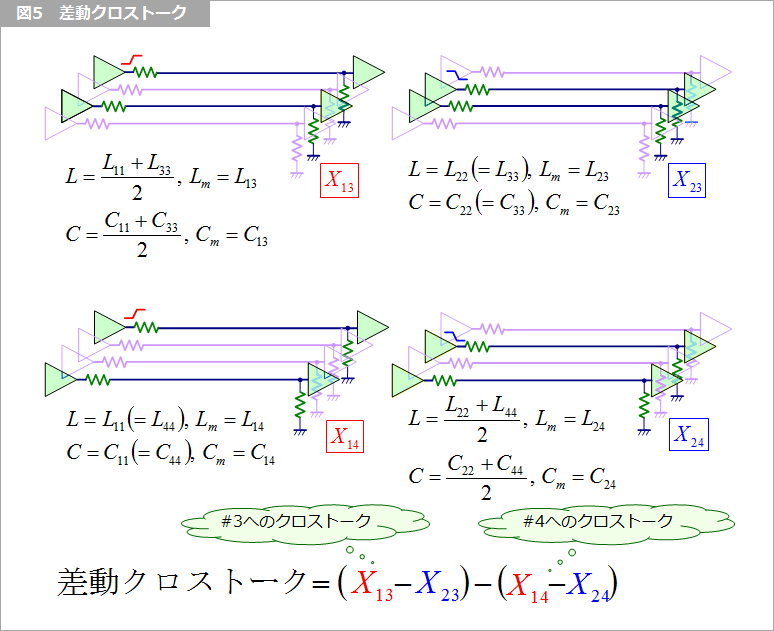
図5 の左上の X13 とは、線路1 から線路3 へのクロストークを表します。他の 3つについても同様です。
図3 に示す 4本線路の LC マトリックスに対して、図5 の例えば X13 を求める場合には、自己インダクタンス L は L11と L33 の平均を取ります。C についても同様です。他の場合にも同様に LC の対角要素(L11、L22など)は対象となる線路の平均を取ります。
計算例を 図6 に示します。
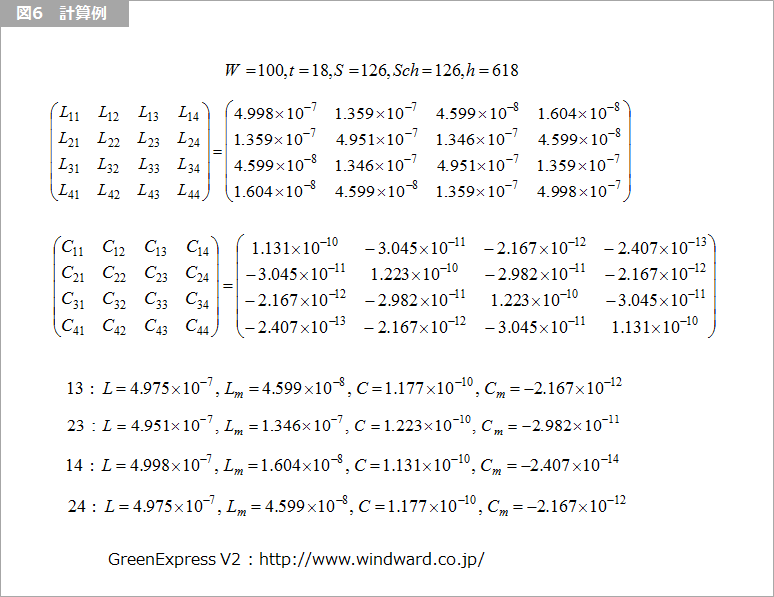
次は、各 2本ずつ選んだ 2本線路のクロストークを求めることになります。
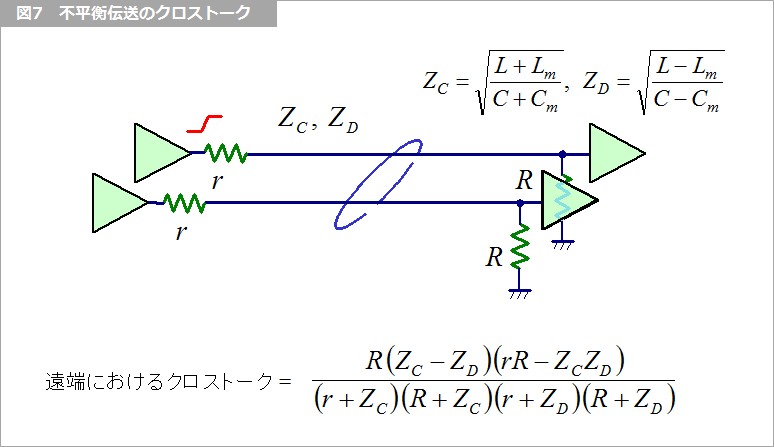
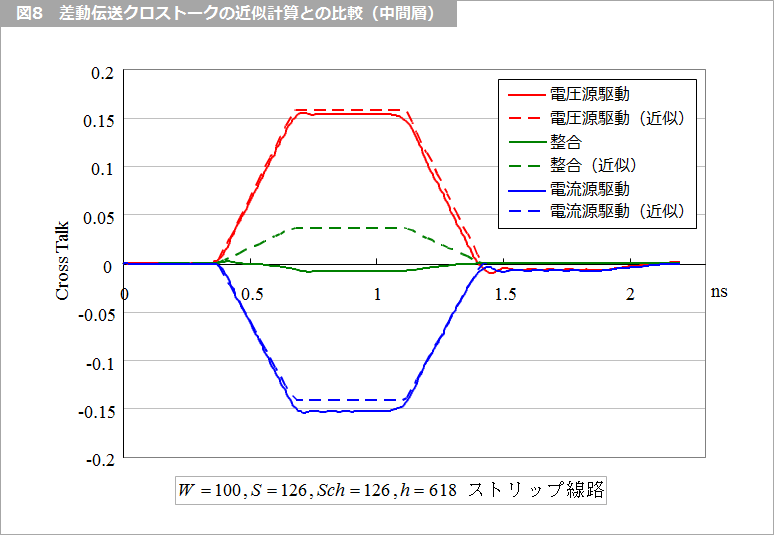
2本のシングル伝送の遠端のクロストークは 図7 のように表されるので、求められた結果を 図5 に代入して、最終的に同図下に示す式で差動クロストークを求めることができます。
その結果を 図8 に示します。CML の場合に誤差が大きいですが、電流源ドライバや電圧源ドライバの場合には高い精度で求めることができます。
このように近似計算して、必要と思われる場合だけ解析ソフトで解析すると効率が上がると思います。やみくもに解析ソフトでやってみるのは多くの時間を要するので、効率的に解析していただければと思います。
碓井有三のスペシャリストコラムとは?
基礎の基礎といったレベルから入って、いまさら聞けないようなテーマや初心者向けのテーマ、さらには少し高級なレベルまでを含め、できる限り分かりやすく噛み砕いて述べている連載コラムです。
もしかしたら、他にも気になるテーマがあるかも知れませんよ!