- 半導体事業HOME
- マクニカの製品・サービス
-
技術情報

-
イベント・セミナー
- 取扱メーカー
- サポート
- お問い合わせ
- 製品購入はこちら
- 半導体事業のメルマガ登録
![]()
![]() 条件を指定して絞り込む
条件を指定して絞り込む
現在2124件がヒットしています。check
数量限定!BLDCモーターセットのプレゼントキャンペーン実施中
BLDC モーターを使うアプリケーションの設計者の方は、「より滑らかで静かに、省電力で、精細にモーターを駆動させたい」と思ったことはありませんか?
今回は、理想的なモーターの動作を簡単かつ自由に実現でき るADI Trinamic™ シリーズのモータードライバーを紹介します。
BLDC モーターの 3つの駆動方式
BLDC モーターの駆動方式には、矩形波電圧駆動、正弦波電圧駆動、FOC駆動(正弦波電流駆動)の 3種類に分けられます。モーターを精細に動かすためには、電流・電圧の両方が正弦波を描くように制御することが重要です。モーターの回転に対して、適切な大きさ・タイミングの電圧を印加しないと、電力の損失が発生し、効率が低下します。
|
矩形波電圧駆動 |
正弦波電圧駆動 |
FOC駆動(正弦波電流駆動) |
|
| 制御周期 / 演算負荷 |
60°転流毎 / 低 |
正弦波毎 / 中 |
PWM毎 / 高 |
| 位置センサーの分解能 |
× |
△ |
〇 |
|
総コスト |
〇 |
△ |
× |
|
速度・位置制御精度 |
× |
△ |
△ |
| 振動・騒音 |
△ |
〇 |
◎ |
| 駆動効率 (省エネ) |
× |
△ |
◎ |
| モーター電圧・電流波形 | 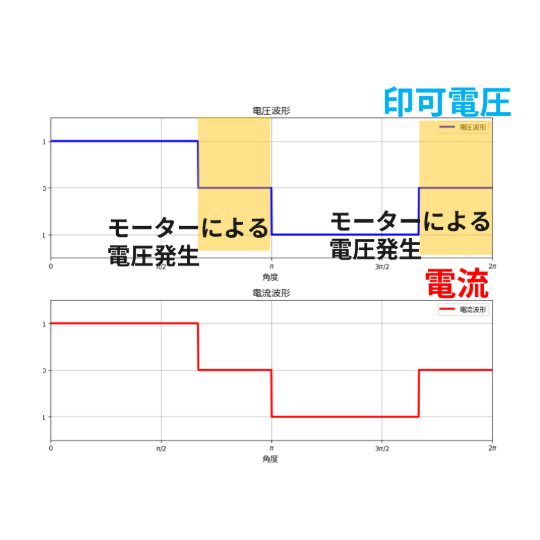 |
 |
 |
■ 矩形波電圧駆動
シンプルな構成の方式で、60度転流ごとに電圧を印加します。電流波形は四角形に近くなり、振動や騒音につながります。制御が容易ですが、動作が粗く、効率は低めです。
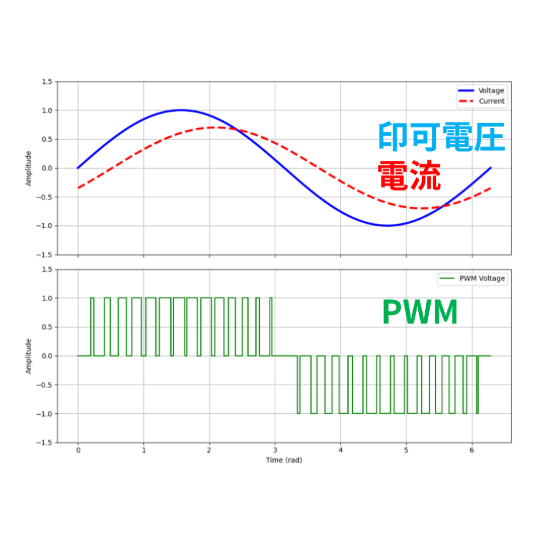
■ 正弦波電圧駆動
矩形波に比べ効率が良く静音低ノイズ方式です。通常、3個のホールセンサーを配置し、検出した回転位置に応じて電流を切り替えます。矩形波電圧駆動よりは滑らかに回転しますが、無駄な電圧が発生するため、効率は中程度にとどまります。
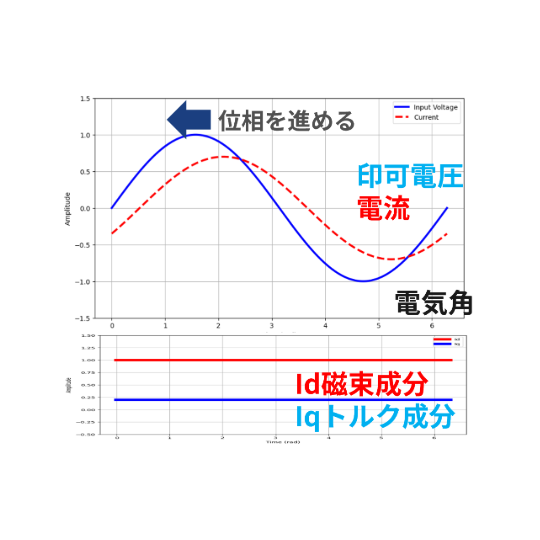
■ FOC 駆動
正弦波電圧駆動よりも分解能が高く、高効率な方式です。常にすべての相の電流を監視し、モーターの状態に応じて電圧を印加します。静かで滑らかな動作を高効率で実現可能です。
特に、ロボットアームや工作機械の先端部、AGV(無人搬送車)の足回りなど、精細な動作や高い効率が求められるアプリケーションには FOC 駆動が適しています。
FOC は複雑なソフトウェアが課題
一方、FOC 駆動はモーターの状態をリアルタイムに分析・制御するため、複雑な演算が欠かせません。ソフトウェアを細かく作り込む必要があり、開発工数が課題となってきました。また、ロボットアームのように複数軸を制御するアプリケーションでは、DSP (Digital Signal Processor) のような高性能のプロセッサーも多く必要でした。
今回紹介する ADI Trinamic™ シリーズ(以下、Trinamic™)の BLDC ドライバーは、FOC 制御機能をハードウェアとして内蔵。静かで滑らかで省電力なモーター制御を、軽い演算負荷で実現できます。
ここからは、Trinamic™ の特徴を具体的に見ていきましょう。
ソフトウェア開発の課題を解決する Trinamic™
Trinamic™ による BLDC 向け FOC システムの構成例(センサーありの場合)
以下の図は、Trinamic™ を使った BLDC モーター向け FOC 制御システムの構成例です。ここではセンサーを用いる方式を紹介します。
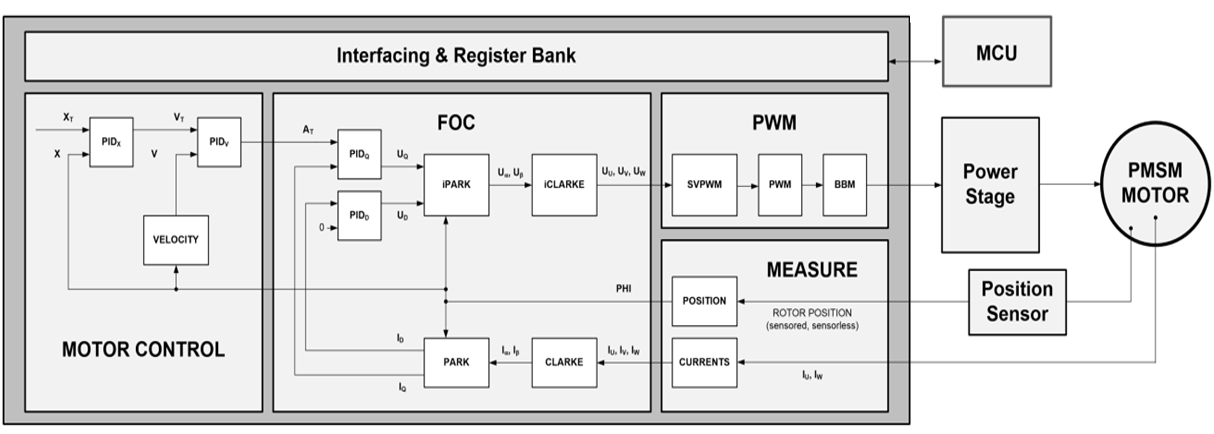
Trinamic™ は、標準的な FOC 制御機能に加えて、速度・位置制御機能もハードウェア側に搭載しています。そのため、ホスト MCU (Micro Controller Unit) にモーター制御アルゴリズムを実装する必要がありません。SPI 通信などでレジスタを設定するだけで、高度な制御が可能です。パワー段のゲートドライバーも内蔵しており、シンプルに設計できます。
Trinamic™による設計への効果
Trinamic™を利用することで、以下のような効果が得られます。
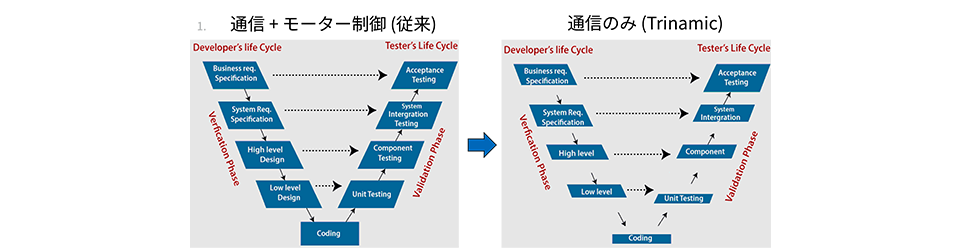
■ ソフトウェアが簡素化され、開発工数を削減
従来の FOC 駆動は、モーター制御機能をソフトウェアとして実装するため、開発工数が膨大でした。仕様変更も煩雑で、係数が変更されただけでも多くの再検証が必要でした。
Trinamic™ では、ハードウェア側でモーター制御ができるため、ソフトウェア側は通信のみで完結します。これにより、開発工数を大幅に削減することが可能です。また、実行中でもパラメーターを変更できるため、実際の動作を確認しながら、効率的に開発を進められます。
さまざまなセンサーに対応できるため、設計の自由度も確保されており、開発工数を削減しながら精細なモーター制御が可能です。ソフトウェアに起因する不具合を減らせるため、システム全体の信頼性も向上します。
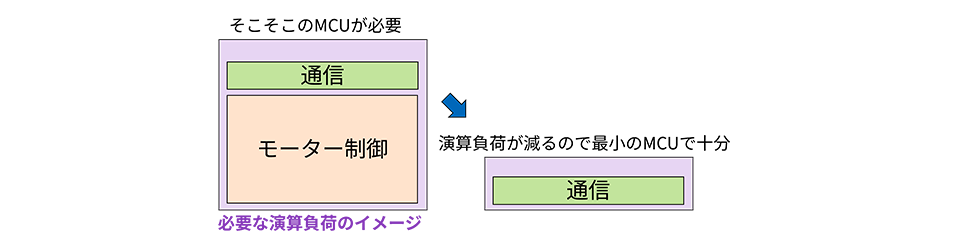
■ MCU をダウングレードして、コスト削減と省エネ化を手に入れる
ソフトウェア側の処理が簡素化されることで、MCUの演算負荷が軽減されます。処理能力の高いMCUが不要となるため、より低コスト・低消費電力のMCUを採用することが可能です。これにより、コスト削減や省エネルギーを実現できます。
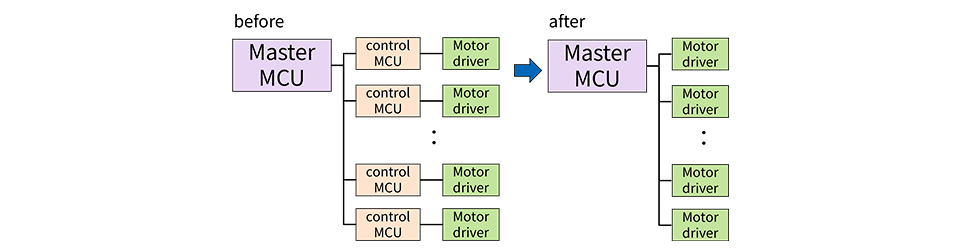
■ 個別のモーター制御用 MCU も不要に
従来の構成では、モータードライバーごとに制御用 MCU が不可欠でした。Trinamic™ では、ホスト MCU だけで複数のモータードライバーの制御が可能です。部品点数を減らし、基板面積やコストを削減できます。
■ 周辺部品が内蔵され、基板の小型化が可能
Trinamic™ は、必要な周辺部品やゲートドライバーをデバイスに内蔵。シンプルな回路構成で、基板面積を小型化できます。
Trinamic™ のさまざまな提供形態
ニーズに応じた提供形態で開発をサポート
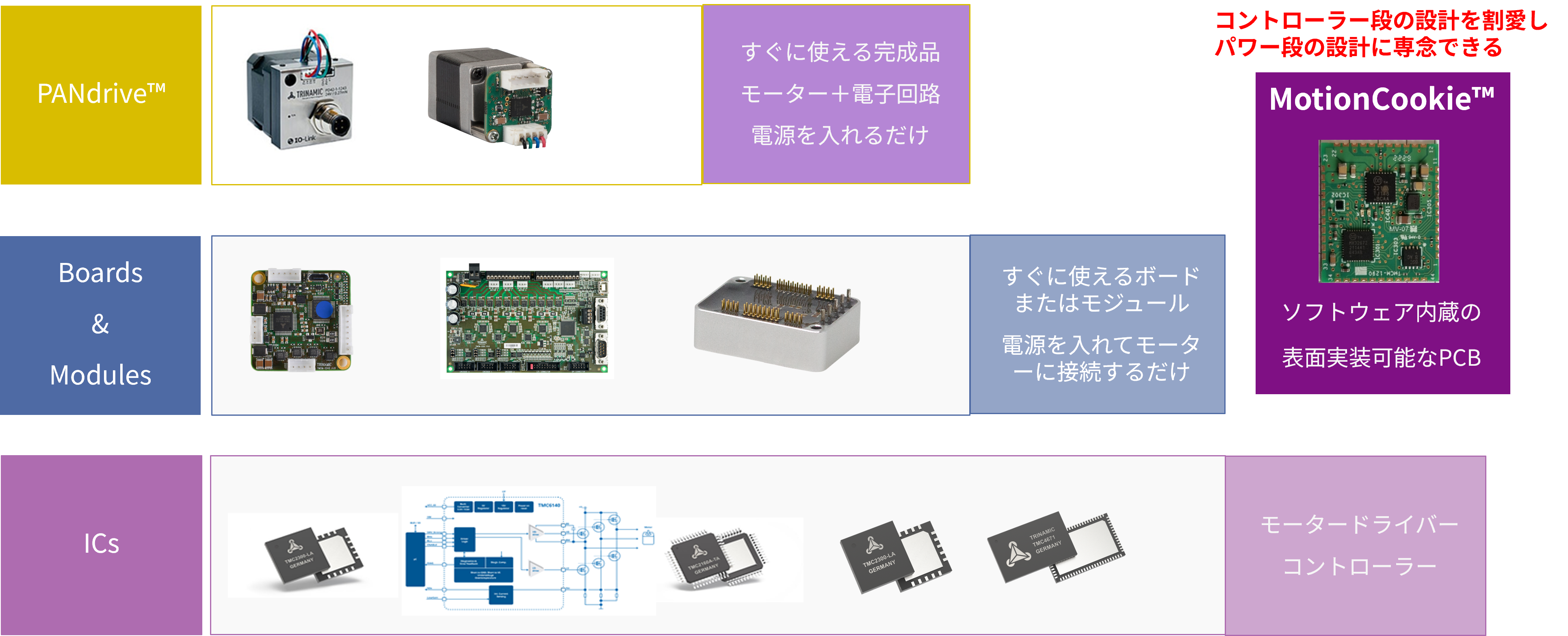
Trinamic™ は、IC 単体からモジュールやモーターまで、幅広いラインナップで提供されています。アプリケーションの要件に応じて、柔軟にソリューションを選択することが可能です。
その中でも注目したいのが、「Motion Cookie™」という新しいタイプのモジュールです。
Motion Cookie™ とは
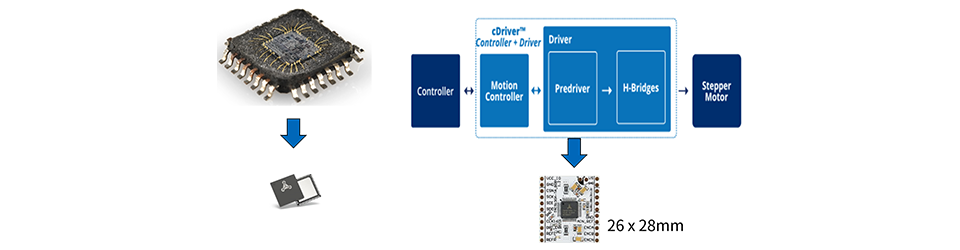
Motion Cookie™ は、モーター制御に必要な機能だけをコンパクトにまとめて、ボードへの面実装を可能にした小型モジュールです。MCU、ゲートドライバー、CSA(電流検出アンプ)を内蔵しており、単体の IC を使うよりも効率的に設計できます。
従来のモジュールとの大きな違いは、パワー段が含まれていない点です。これにより、設計の省力化と、自社のノウハウを活用したパワー段設計が両立できます。
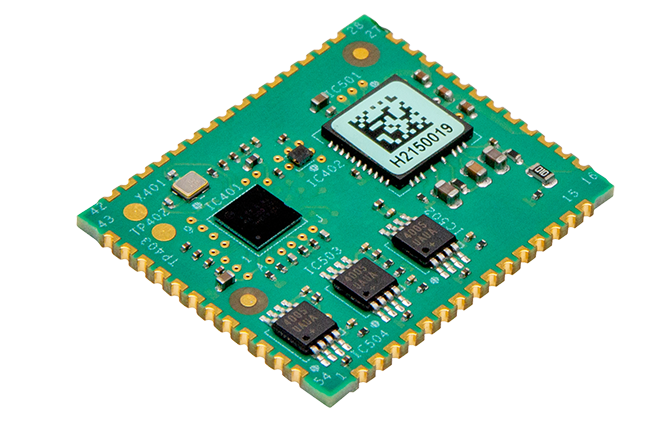
BLDC 向け Motion Cookie™ 製品「TMCM1690」
BLDC モーター向け Motion Cookie™ の代表的な製品が「TMCM1690」です。モーター制御に必要な機能を幅広く搭載しており、さまざまなニーズに対応できます。
TMCM1690 の特長
出力段のトランジスタを自由に選択でき、最大 100A 程度まで対応可能です。耐圧 60V に対応し、24V 系はもちろん、産業系でニーズの多い 48V 系でも利用できます。エンコーダーやホールセンサーなど、多様なフィードバック方式に対応しており、27mm × 22.5mm の小型サイズで省スペース設計に適合します。
特徴的な機能の 1つが、S 字ランプなどの高度なモーション制御機能を内蔵していること。滑らかな加速・減速で、揺れや衝撃を抑制できます。また、低速・高速で異なるパラメーターを設定できる「Lower Velocity PI」により、精緻な動作を実現。ブレーキ機能や診断機能も搭載しています。
■ 代表的なスペック
・単軸 FOC サーボコントローラーゲートドライバーモジュール
・対応モーター:3相 BLDC モーターおよび DC モーター
・供給電圧範囲:+10V~+60V DC
・ゲート駆動電流:0.5A/1.0A/1.5A から選択可能、最大 1.5A
・PWM 周波数:最大120kHz(20kHz ~ 120kHz の範囲で設定可能)
・オンボード電流センスアンプを搭載
・対応位置フィードバック:インクリメンタルエンコーダー (ABN)、デジタルホールセンサー、アブソリュートエンコーダー (SPI/SSI)
・モジュールサイズ:27mm x 22.5mm とコンパクト
・通信インターフェース:UART (RS232)、CAN、およびEtherCAT® (SPI PDI)
・プロトコルサポート:TMCL、CANopen、CANopen、-over-EtherCAT (CoE)
■ 特徴的な機能
・モーション制御
◦線形ランプと S 字型ランプの両方をサポート。S 字型ランプは、加速度の線形変化により、よりスムーズな動作とシステム内の共振の大幅な低減を提供します。
◦「Lower Velocity PI」機能により、低速域で異なる PI パラメーターを設定でき、より精密な制御とスムーズな動作を実現します。
・ブレーキ機能
◦独立した電源を使用できる機械式ブレーキをサポートし、リリースデューティサイクル、保持デューティサイクル、リリース期間などを設定可能です。
◦モーターが減速する際に電源ラインへ回生されるエネルギーを散逸させるためのブレーキチョッパー機能を備え、システム損傷を防ぎます。
PWM ブレーキと抵抗/シャントブレーキの 2種類に対応しています。
・診断と保護
◦エネルギー消費を監視するIIT (Integral of Squared Current over Time) モニター機能。設定された時間内にリミットを超過した場合、
モーターを停止し、IIT エラーフラグを設定します。
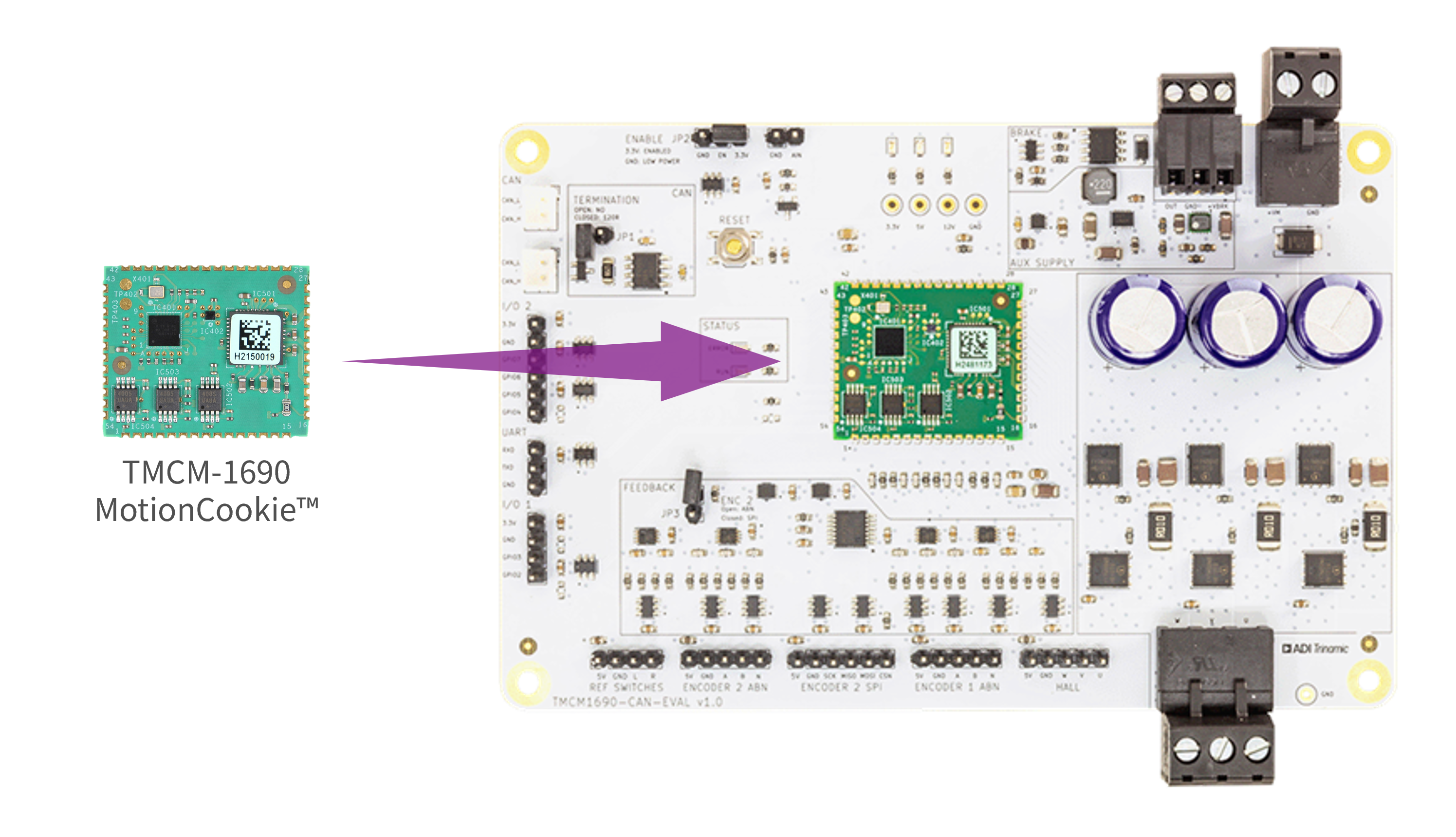
「TMCM-1690」
評価ボード「TMCM1690-CAN-EVAL」
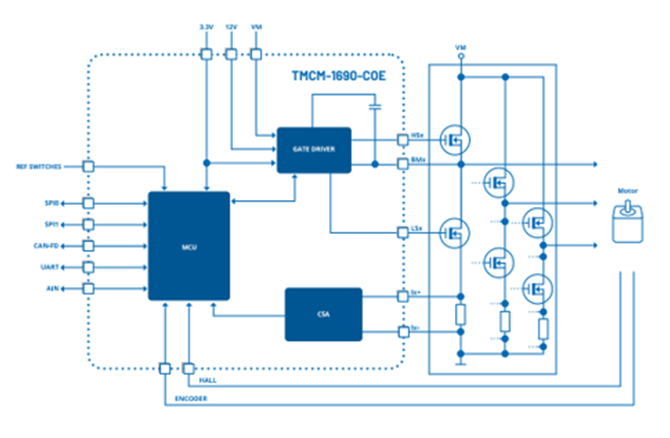
TMCM1690 ブロック図
GUI による簡単設定
Trinamic™ は、GUI ツール「TMCL-IDE」を使うことで簡単に設定できます。画面上の指示に従って、動作条件を入力するだけで、設定が完了します。プラグアンドプレイで、実際の動作を確認しながら設定できるため、自由自在なモーター制御を短時間で実現できます。
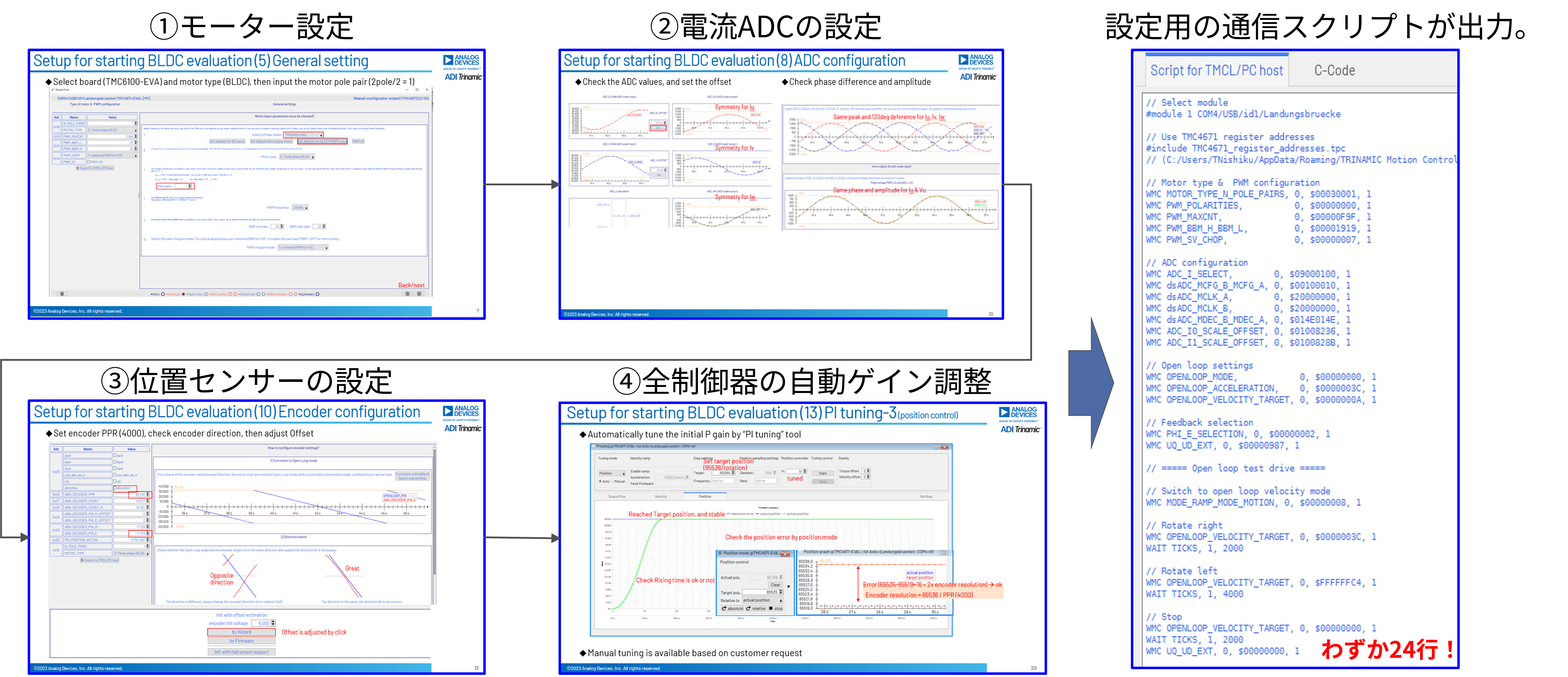
GUI ツール「TMCL-IDE」は短時間ですぐに慣れます!
これまでの提供形態との比較
以下は、今回ご紹介したMotion Cookie™ 製品 TMCM1690 と、従来のモジュール製品 (TMCM1617)、IC 単体 (TMC4671) の比較表です。機能の違いの参考にしてください。TMCM1690 は、静かで滑らかな動作や低消費電力が求められるアプリケーションを中心に、さまざまな場面で活用できます。
| FOC |
〇 |
||
| 電流センス機能 |
〇 |
× |
|
| ゲートドライバー |
〇 |
× |
|
|
位置フィードバック |
ABN, Digital Hall, Absolute encoder (SPI) |
ABN, Digital Hall |
ABN, Digital/Analog Hall, Analog Encoder |
| モーションコントロール |
〇(線形ランプとS字型ランプ) |
× |
|
| 対応プロトコル |
CANOpen, TMCL,CoE |
× |
|
| パッケージ(mm) |
MotionCookie (27x22.5x3) |
Module (36.8x26.8x11.1) |
QFN76 (10.5x6.5) |
アプリケーション例
- 3D プリンター
- 産業オートメーション
- ロボット、AGV
- ラボオートメーション
- 医療・ヘルスケア
- バッテリー駆動
- ホームオートメーション
今回は、BLDC モーターの駆動方式の違いと、精細な FOC 制御を簡単なソフトウェアで実現する Trinamic™ の特長を紹介しました。
BLDC モーターを静かで滑らかに、省電力で動かすには、FOC 駆動が有効です。Trinamic™ では、これまでの FOC 駆動の課題だったソフトウェア開発を大幅に削減でき、簡単な設定だけで、自在なモーター制御を実現します。Motion Cookie™ として提供される TMCM1690 は、パワー段を自由に設計できるメリットがあり、S 字ランプなどの高度なモーション制御も容易です。
ご自身のアプリケーションに活用できそうだと感じた方は、まずは評価から始めてみませんか?
どうぞお気軽にお問い合わせください。
商品の購入はこちら
メーカーサイト/その他関連リンクはこちら
お問い合わせ
本記事に関してご質問がありましたら、以下よりお問い合わせください。
アナログ・デバイセズ メーカー情報 Top へ
アナログ・デバイセズ メーカー情報 Top へ戻りたい方は以下をクリックしてください。