- 半導体事業HOME
- マクニカの製品・サービス
-
技術情報

-
イベント・セミナー
- 取扱メーカー
- サポート
- お問い合わせ
- 製品購入はこちら
- 半導体事業のメルマガ登録
![]()
![]() 条件を指定して絞り込む
条件を指定して絞り込む
現在2189件がヒットしています。check

前の記事はこちら:第一話マクニカ杯開催?!
コンセプト決め~目指せ和製マラドーナ~
まずサッカーロボットを作るにあたってクロちゃんに課せられたミッションがいくつかありました。
①コンロトーラから本体を無線通信で制御する。
②SOCはPSoC(Infineonのマイコン)を使用する。
③ドリブル、パス、シュートの一連の動作を行う。
④コントローラの入力に対して何かしら(LED、音声、アクション等)のフィードバック動作をすること。
ロボットを作成する上で一番大切だと言っても過言ではないコンセプト決め。
これらの仕様を満たす最強のサッカーロボットを作るべく、ここはクロちゃんのセンスが問われます。
誰にも負けない最強のサッカーロボットとは何だ?!
大事なのは最強のシュートを打つための機構?それとも当たり負けない馬力?
いやいや、そんなのナンセンスだ!!
誰にも負けない最強のサッカーロボットとはそれすなわち歴代最強のサッカー選手と同義!
クロちゃんは歴代最強のドリブラー、マラドーナを作り上げることに決めました!
マラドーナの5人抜きを再現するべく「圧倒的敏捷性と操作性」というコンセプトを掲げ、サッカーロボットの製作を始めました。
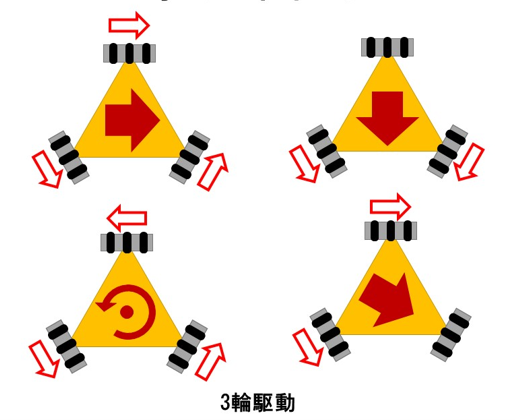
まず圧倒的俊敏性を実現するべくサッカーロボットの核となるホイールとして採用したのがこのオムニホイールです!

何と言ってもこのホイールは垂直方向にも小さなタイヤがついているので、このホイールによってロボットは前後左右、そして斜め方向への移動と機体の回転が可能となります。
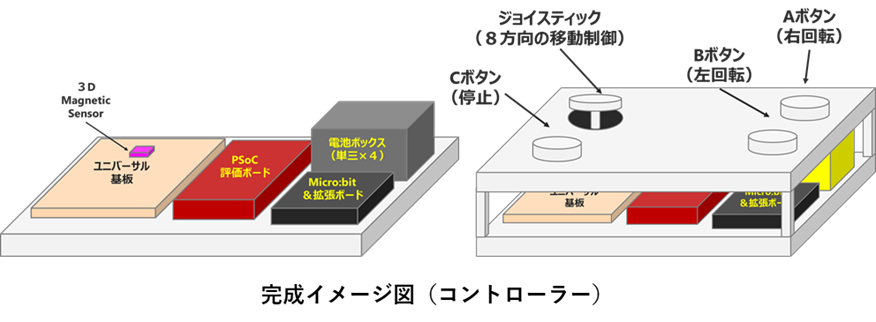
操作性についてはInfineon製の3D Magnetic Sensorを用いて、ゲーム機のコントローラのようなジョイスティックを実装しロボットの8方向の制御を行うことにしました。

コンセプトが決まったので、このコンセプトをもとに仕様を決めていきます。
「仕様決め~思ったより四角くなったねキミ~」
コントローラのジョイスティックを倒した方向によってロボットの8方向の移動が可能となり、メカスイッチによって回転と停止ができるようSOPで制御します。
コントローラ、ロボット間の通信にそれぞれMicro:bitという無線通信を行えるマイコンボードを使用し、SOPからの信号をロボットに送信する仕組みとなっています。
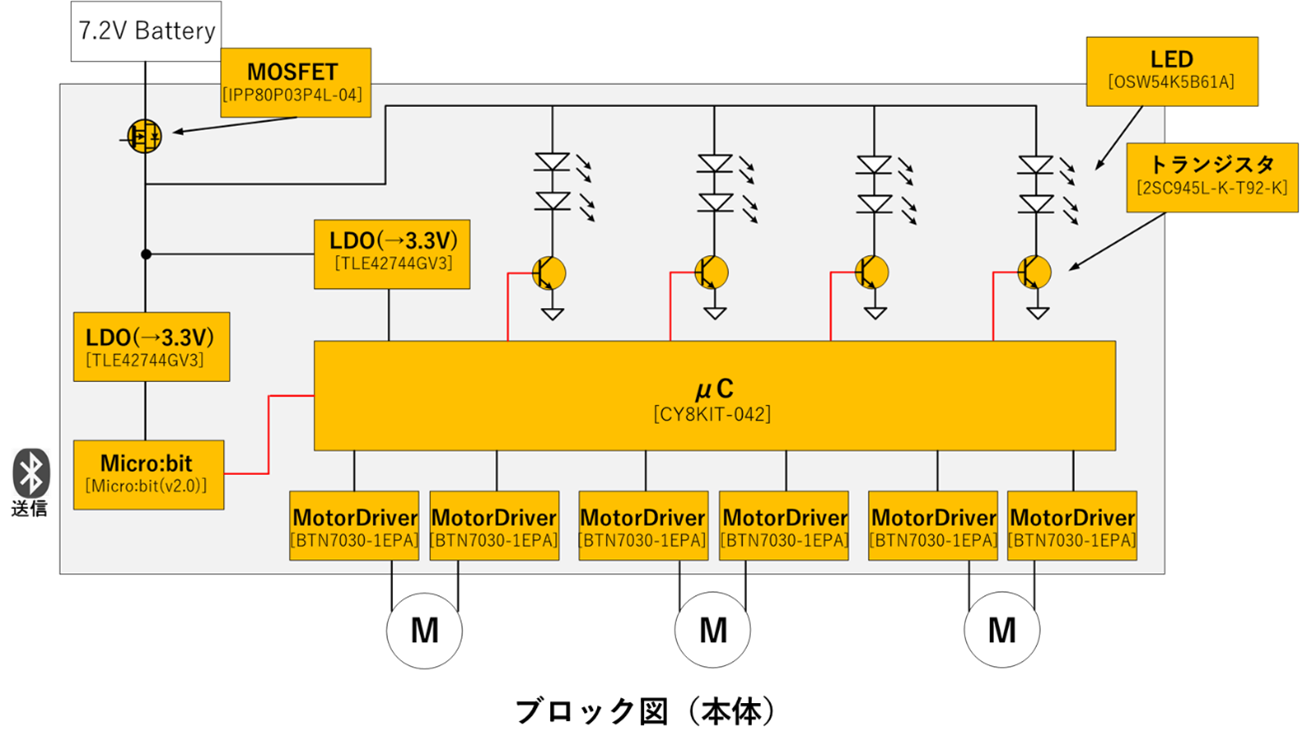
仕様をもとに部品選定を行い、作成したブロック図は以下のようになります!
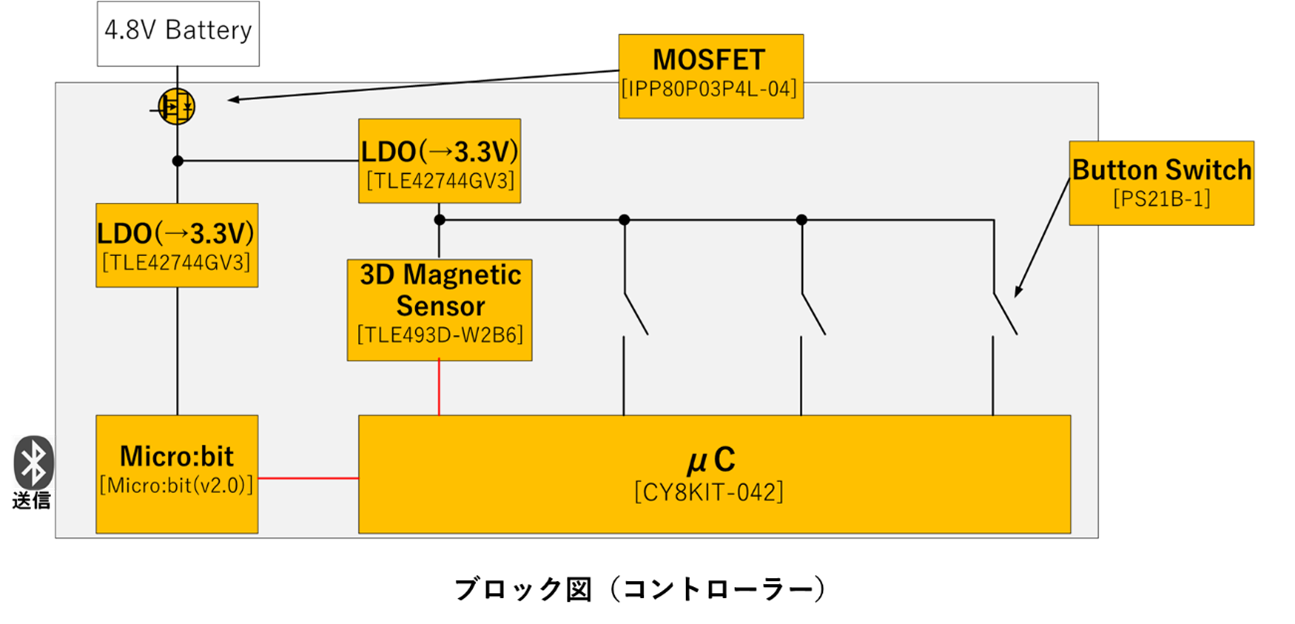
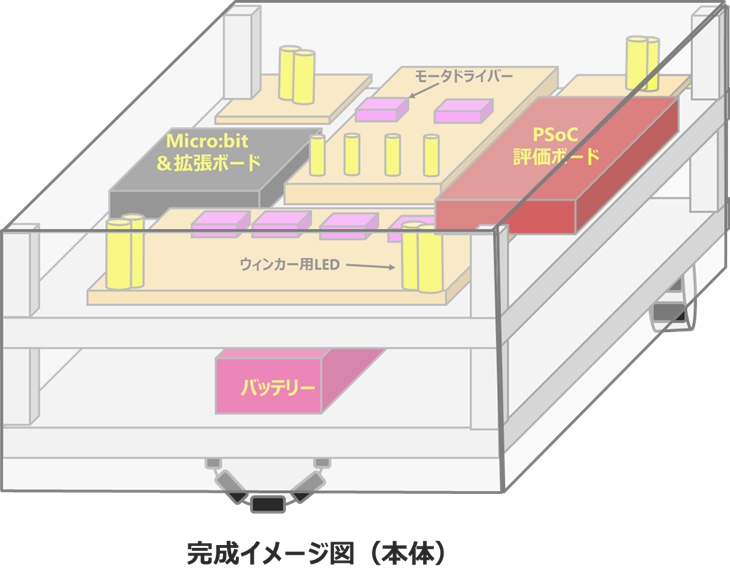
ロボット本体のモータの制御は2つのMOSFETとゲートドライバーが一体のチップとなっているHalf BridgeタイプのInfineonのモータドライバーを使用します。1つのモータに2つのHalf Bridgeドライバーを使用することでH Bridgeを構成し順転と逆転を制御することができます。
SOPはコンロトーラからの信号をもとにモータドライバーを制御します。
また、機体の四方にLEDを実装し、各移動モーションによって各LEDを点灯させる機能も実装しました(どうせなら派手な方がいいよね!)
仕様をもとに部品選定を行い、作成したブロック図は以下のようになります!
さて、コンセプト決めから仕様決め、ブロック図の作成まで順調に進んできました。次のページでようやく機体の作成に取り組んでいくわけですが、皆様はただ順調にロボットが完成するブログ記事を見ていて楽しいでしょうか?退屈してはいませんか?
けれども皆さんご安心ください!このロボット製作日記そんな甘っちょろいブログではありません!次のページから新人エンジニアが慌てふためく波乱万丈な実装編が待っていますのでお楽しみに!!
【新人エンジニアのサッカーロボット製作日記】
第一話『マクニカ杯開催?!』
第二話 『これが最強のサッカーロボット?!君の名はマラドーナくんだ!!』
第五話 『運命のKICK OFF!! その栄冠を掴むのは...』