- 半導体事業HOME
- マクニカの製品・サービス
-
技術情報

-
イベント・セミナー
- 取扱メーカー
- サポート
- お問い合わせ
- 製品購入はこちら
- 半導体事業のメルマガ登録
![]()
![]() 条件を指定して絞り込む
条件を指定して絞り込む
現在2191件がヒットしています。check
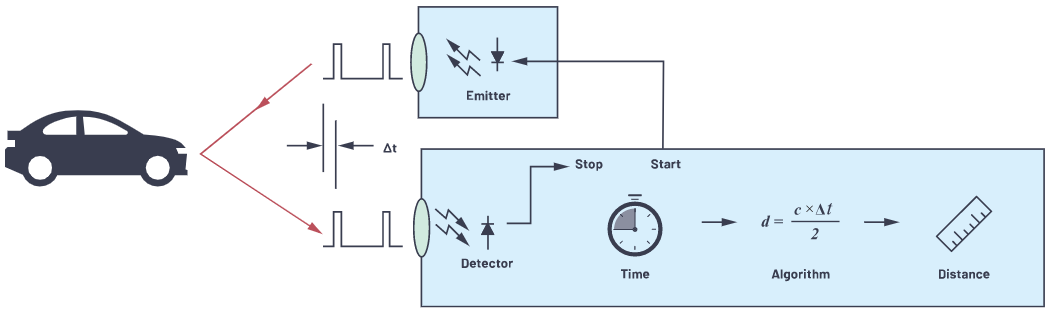
ToFカメラでの測定原理
ToFカメラはレーザーなどの変調された光を発射し、それが対象物に反射して返ってくる光をキャプチャーすることで深度を測定します。距離は、光が放出されてから反射光を受け取るまでの時間遅延Δtによって決定することができます。時間遅延は、カメラとオブジェクトの間の距離の2倍に比例します(往復)。
したがって、距離は深さd =(c×Δt)/ 2として推定できます。ここで、cは光速です。このように、ToFカメラを使うと2Dデータと必要な深度情報を測定することができます。
本記事ではアナログ・デバイセズ社のToFカメラモジュールの詳細を紹介します。
アプリケーションの開発を加速するToFカメラモジュール

アナログ・デバイセズ社が提供するアナログ・フロントエンド ADDI9036は、お客様のToFカメラアプリケーションの開発を加速します。
また、アナログ・デバイセズ社のアライアンス・パートナーである株式会社シーアイエス(以下CIS)は、ADDI9036を使用したToFカメラモジュール DCC-RGBD1を提供しています。そのToFカメラモジュール DCC-RGBD1と搭載デバイスについて、わかりやすく解説します!
DCC-RGBD1の製品特徴
YUV+Depthに対応
- ToFにはVGA解像度のCCDセンサーを搭載
- RGBにはQuad VGA解像度 Global Shutter方式のCMOSセンサーを採用
- オンボードのFPGAを用い、YUV+ Depth情報を同期、出力
広範囲&高精度
- WR (Wide Range) モードに対応 30cmから5mのシームレスな測距に対応
- SN (Super Near) モードに対応 15cmから70cmに対応
- WRモード:標準偏差率2.0%以下、SNモード:標準偏差率1.5%以下
小型・USB接続が可能
- モジュールサイズ:WxHxD 55mmx50mmx 35mm
- USB 3.0 microBコネクター搭載(給電非対応)
開発環境
- Windows/Linux対応のSDK
- Windowsベースで距離画像を簡易表示できるRGBDViewer
ROSドライバーパッケージ
- 対応応OS:Ubuntu Linux
- ROSドライバー:ROSバージョンKineticとMelodicに対応
- ROS Kinetic:Ubuntu 16.04、Ubuntu 18.04
- 深度・IR・カラー画像の取得
- 深度・IR・カラー画像の取得
- 処理結果をRVizで3D表示
- パラメーター変更、ポイントクラウド処理、ノイズ除去、平面検出・除去、対象物点群抽出、座標算出
提供元:TORK(東京オープンソースロボティクス協会)より
プログラム可能なタイミングおよびVドライバーを搭載したCCD ToFシグナル・プロセッサー ADDI9036
ADDI9036はアナログ・フロントエンド、プログラマブル命令セット・アーキテクチャー・タイミング・ジェネレーター、7チャンネル・レーザー・ダイオード・ドライバー、7チャンネルHドライバー、16チャンネル垂直ドライバー(Vドライバー)を内蔵した高集積デバイスで、高精度なToF CCDカメラに最適な製品です。
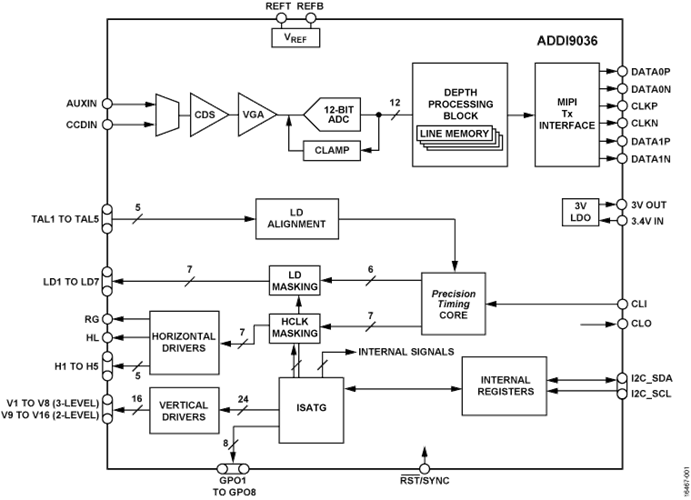
ADDI9036は非常に高機能な製品のため、使いこなすためには相応の開発リソースが必要になります。また、ToFカメラ開発も専門のノウハウが必要とされますので、CISが提供するToFカメラモジュールはこれらの課題を解決します。
ToFカメラモジュールを使用したデモンストレーション動画
本記事で紹介しているToFカメラモジュールを実際に使用して、人との距離を測定したデモンストレーション動画です。
アプリケーション例
- ロボット・ビジョン
- ロジスティクス
- AGV
- 監視
- メディカルケア



お問い合わせ / お見積もり
本記事では、ToFカメラアプリケーションの開発を加速するカメラモジュールと搭載デバイスについて解説しました。詳細を知りたいという方は、以下からお問い合わせください。
また、本記事に関連した「ToFカメラ開発アプリセミナー」というセミナーを過去に開催しました。もし開催したセミナー資料をご希望の方がいましたら、問い合わせ内容に ”ToFカメラ開発アプリセミナー資料希望"と記載のうえ、お問い合わせください。
アナログ・デバイセズ メーカー情報Topへ
アナログ・デバイセズ メーカー情報Topに戻りたい方は以下をクリックしてください。