- 半導体事業HOME
- マクニカの製品・サービス
-
技術情報

-
イベント・セミナー
- 取扱メーカー
- サポート
- お問い合わせ
- 製品購入はこちら
- 半導体事業のメルマガ登録
特徴
[ ARM CPU上でリアルタイム動作 ]
Uncanny Vision社のソフトウェアはARM Cortex-Aシリーズ上で優れたリアルタイム性を実現しているため、コンピュータビジョンにおける以下の課題を解決できます。
- 通信帯域
クラウド上で動作するコンピュータビジョンソフトウェアを使用するには、大容量の映像データをカメラからクラウドまで送り続ける必要があります。
- 速度性能
組み込みシステム上で動作させるには処理に時間が掛かり過ぎてしまい、期待する検出・認識をリアルタイムに行うのは困難です。
- 組み込み
GPUを使用することで(クラウドに接続せず)ローカルでコンピュータビジョンを行えますが、消費電力やコストが大きくなります。
[ アプリケーション例 ]
マシンビジョン、車載カメラ、監視システム、ジェスチャー認識、ドローン、ロボティックスなど様々な分野で適用できる技術です。
- 顔、歩行者、動物検出
- 物体、シーン認識
- 物体トラッキング
- 人間の態勢認識と行動予測
[ あらゆる環境で使用可能 ]
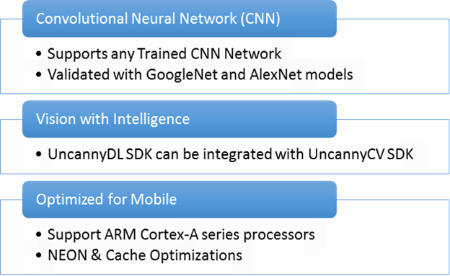
Linuxの他、iOS、Android、QNX、INTEGRITYなどあらゆる組み込みプラットフォームで実績があります。 また、ARM Cortex-Aシリーズだけでなく、Intel x86環境などでも使用可能です。
ラインナップ
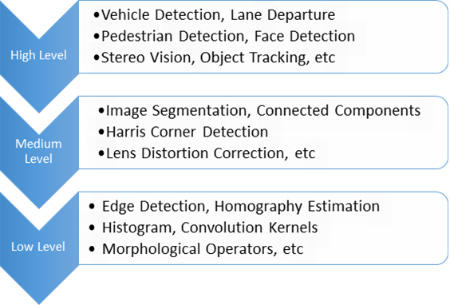
[ Uncanny CV ]
組み込み向けに最適化された高速なコンピュータビジョンライブラリです。
70種類以上の画像処理アルゴリズム・関数を持っています。
|
アルゴリズム |
処理速度 (メガピクセル/秒) |
OpenCVとの比較 |
|
キャニーエッジ検出 |
25.0 |
約 3倍 |
|
ORB(1500 keypoints) |
3.7 |
約 5倍 |
|
畳み込みフィルター 5x5 |
96 |
約22倍 |
|
収縮/膨張 |
153 |
約 6.5倍 |
|
インテグラルイメージング |
96 |
約 2.4倍 |
|
ハリスコーナー検出 |
15.7 |
約 6.5倍 |
|
顔検出(LBP Cascade) |
(パラメータにより異なる) |
約 3.5倍 |
|
連結成分抽出 |
(画像により異なる) |
約 1.7倍 |
|
歩行者検出 ※Cortex-A15にて測定 |
1.7 |
約 9倍 |
[ Uncanny DL ]
組み込み向けに最適化された高速なディープラーニングライブラリです。
UncannyCVと組み合わせて使用することでより高い精度を実現できます。
[ 開発サービス ]
コンピュータビジョンアルゴリズムの開発、高速化、FPGAへの
ポーティング、学習作業の代行などのサポートも行っております。