- 半導体事業HOME
- マクニカの製品・サービス
-
技術情報

-
イベント・セミナー
- 取扱メーカー
- サポート
- お問い合わせ
- 製品購入はこちら
- 半導体事業のメルマガ登録
![]()
![]() 条件を指定して絞り込む
条件を指定して絞り込む
現在2120件がヒットしています。check
2025国際ロボット展 出展レポート
マクニカはNVIDIAの代理店として、2025国際ロボット展に出展しました。
このページでは、本展示会の内容をより詳細な説明を聞きたい方・改めて見直したい方に向けた記事となっております。

本展示会のテーマ
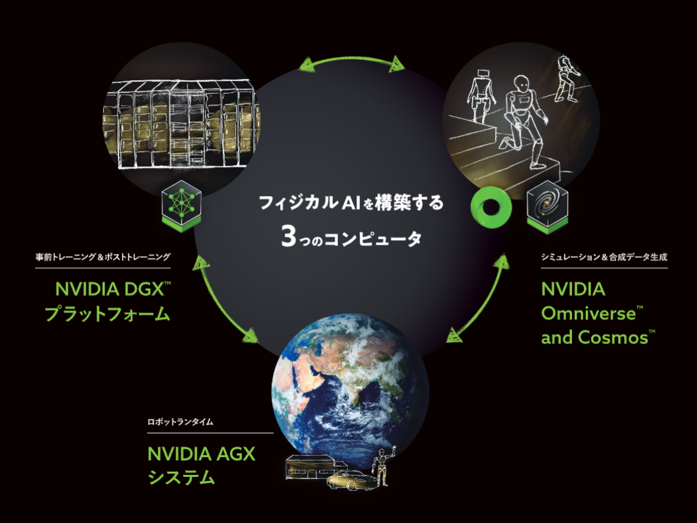
マクニカは今回、NVIDIAの提唱する「3つのコンピューターによるソリューション」をテーマに展示しました。
3 台のコンピューターによるソリューション: AI ロボットの次の波を推進
この「3つのコンピューター」の詳細は上記サイトをご確認頂ければと思いますが、概要を簡単に説明すると、
①大量のデータを使ってAIモデルを「学習」(トレーニング)
②バーチャル空間でロボットを「試験」(シミュレーション)
③「学習」「試験」した内容をロボット本体に「実装」(デプロイ)
という流れになります。
AIを活用することで、従来のルールベースによるロボット動作から、さまざまな用途(マルチタスク)に対応可能なロボットが実現できると考えています。
本展示会では、このソリューションについての一端をご紹介します。
AIモデル作成に向けたデータセット生成/拡張

本展示では、バーチャル空間上でのロボットシミュレーションによる「試験」、「データセット生成」、さらに生成したデータセット動画内の物体を置き換えたバリエーション動画を自動生成する「データセット拡張」の実施例をご紹介しました。
「データセット生成」では、バーチャル空間上でロボットや作業環境を再現し、現実の作業シナリオをシミュレーションするPick&Placeのデモを展示しました。こちらにはNVIDIA Omniverse™ ライブラリ及びオープンソースのロボティクス シミュレーションフレームワークであるNVIDIA Isaac Sim を活用しています。現場では収集が困難なデータも、バーチャル空間であればいつでもどこでも安全・大量に取得することが可能です。
さらにNVIDIA Cosmos™ 世界基盤モデルを用いて、様々な条件やバリエーションを加え、データセット動画の拡張を行いました。
データセット生成/拡張により、AIモデルの汎用性・適応力を高めます。これにより、現実環境での予期せぬ状況にも強い、堅牢なロボティクスAIの開発が可能となります。
デジタルツインを活用したロボット制御

バーチャル空間と現実空間の両方でシミュレーションを行い、動作・精度・反応速度などを評価します。実際のロボット運用に直結する技術検証です。
ロボットアームの開発を加速するためのソフトウェアプラットフォームNVIDIA Isaac Manipulatorを活用し、カメラ映像から得られるロボットと障害物情報より、わずか数秒で2つの所定のポーズ間の最適経路を生成するだけでなくロボットが未知の障害物を回避します。
本展示では、アーム先端に装着したGripperも同時に制御し、障害物を避けたPick&Placeを実施しています。
一例として、工場内の生産ラインにおけるロボットのPick&Place作業の自動化を想定しますが、作業中に障害物にぶつかると、ロボットを停止しなければならず、生産効率の低下につながります。
本技術を用いることで、ティーチングレスで障害物回避が可能となり、生産効率を維持することが可能となります。
■参考文献
・Isaac for Manipulation Reference Architecture
https://nvidia-isaac-ros.github.io/reference_workflows/isaac_for_manipulation/reference_architecture.html
・cuRobo
https://curobo.org/
https://curobo.org/reports/curobo_report.pdf
https://github.com/NVlabs/curobo
・cuRobo and cuMotion
https://docs.isaacsim.omniverse.nvidia.com/latest/manipulators/manipulators_curobo.html
AIロボット開発を加速させる基盤モデルを活用したPick&Place

NVIDIA Isaac GR00T™ N1.5の視覚言語アクション (VLA) モデルを用いて、ロボットアームSO-ARM101が物体をつかみ上げ、指定場所へ正確に配置する一連の作業工程をデモンストレーションしています。
Isaac GR00T Nは、NVIDIAが開発した世界初の「ヒューマノイドロボット向けオープン基盤モデル」です。ヒューマノイドロボット向けではあるものの、ロボットアームでも使用することが可能です。
注目すべきは、このデモが わずか約30回のテレオペレーションデータ をもとに構築されている点です。GR00T N1.5が汎用性の高い推論能力や大規模データでの事前学習を背景に、この少ないデータセットによる実装を実現しております。
今回の展示では、このGR00T N1.5をFinetuneし、2025年8月に発売開始した最新のEdge AIプラットフォーム NVIDIA® Jetson Thor™にデプロイしております。ロボティクス向けに設計されたJetson Thorが、ロボットのパフォーマンスを支えています。
ビデオ分析によるAI異常検知

NVIDIA社が提供するVSSエージェントである、”NVIDIA AI Blueprint for Video Search and Summarization”(以下、VSS)を用いた異常検知デモです。入力された動画をテキストで要約するのみならず、プロンプト入力の質問に対して、動画の内容を分析してテキストで回答を出力することが可能です。
VSSを一言で表現すると、「動画を分析・要約・検索できるAIプラットフォーム」です。
VSSがもたらす最大の価値は、既に保有している映像資産やカメラ映像を、単なる記録から実用的な情報に変換できるところにあります。
従来のビデオ分析ソリューションと比較すると、動画から重要なポイント・指定した関心イベントを自動でまとめてくれること、チャット形式で動画の内容について質問できること、オンプレミス / クラウド問わず素早い導入が可能なことなどが特長です。
これらの特長により、市場投入までの時間を短縮、コスト削減による高い費用対効果、新しいソリューションとビジネス価値の提供が見込まれます。
英語の動画になりますが、YouTubeでもNVIDIAのデモ動画がアップロードされておりますので、こちらもご確認ください。(本展示とは別の動画で動作しています)
マクニカとしての今後の取り組み
以上が、今回の出展内容の概略となります。いかがでしたでしょうか?
当社マクニカは、フィジカルAIの社会実装に注力しています。
それに伴い、NVIDIAの一次代理店として製品のサポートを提供するのはもちろんのこととして、皆さまがお持ちの課題解決に向けた伴走支援のサービスも提供しております。
マクニカ、Physical AI検証環境を構築し、ロボティクスAI実装を支援 - AI事業 - マクニカ
社内でこのようなプロジェクトが走っていて支援して欲しい…といったお悩みベースでも大歓迎です。
当社との協業にご興味がございましたら、是非下記よりお問い合わせください。