- 半導体事業HOME
- マクニカの製品・サービス
-
技術情報

-
イベント・セミナー
- 取扱メーカー
- サポート
- お問い合わせ
- 製品購入はこちら
- 半導体事業のメルマガ登録
![]()
![]() 条件を指定して絞り込む
条件を指定して絞り込む
現在2186件がヒットしています。check
はじめに
自動車業界は地球温暖化対策のため、今後は電気自動車への急速な移行が考えられます。今までのエンジン車と違い、大規模なモーター駆動によりモーター周りは磁場が所々に発生し、今まで使用していたHall素子等の磁気に影響される部品の使用は、難しくなってくると考えられます。昨今Hall素子と同様に非接触型で周りの磁力に影響されにくいInductive Sensorが注目されています。
Inductive Sensorで現在使用されているのはInductive SWなどの導電体と組み合わせたものが知られています。ファラデーの法則は、みなさんご存知だと思います。導電体が磁場に変化をもたらすと磁場の変動に従い、導電体に磁場を打ち消す磁場が発生することによって起電力が導電体に発生するという電磁誘導です。
Inductive Sensorの原理
図1をご覧ください。右側はトランスをイメージした物で、左側には発振器がついています。ファラデーの法則は左側に直流を流したとしても、発生する磁場は変化しないため Secondary Coil(2次側コイル)には誘導起電力が発生しないので出力はありません。
交流にすれば磁場は常に変化をするのでSecondary Coilに誘導起電力が働いて、出力が送出されることになります。間にあるTargetが移動すれば、Primary Coil (1次側コイル)とSecondary Coilの巻き数比が変化し、出力される波形の電圧も変化します。もし、これがSin波とCos波が出力されるとすれば、出力される波形の電圧値を比較すれば、Sin、Cosの各位相によってTargetがどの位置にあるかがわかります。トランスの例ではありますが、基板上にCoilをプリントしこの原理を用いて角度や距離の計測をするのがInductive Sensorです。
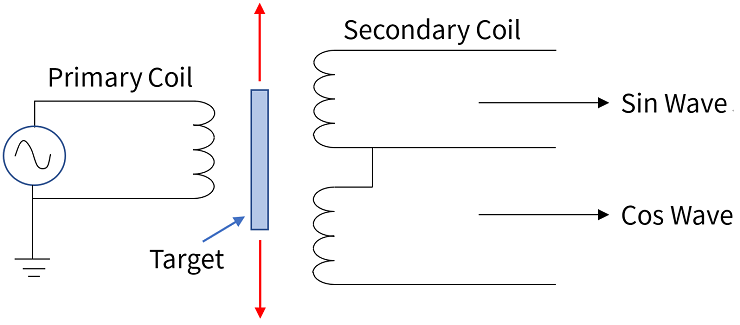
図1 Inductive Sensor トランスモデル
図2のように、基板上にPrimary Coilを設計し、このPrimary CoilをコンデンサとのLC共振回路で使用します。共振回路ですので図1の発振器を備えたPrimary Coilと同様に磁場を発生させることができます。次にSecondary Coilですが、Sin、Cosの波形を描くように設計します。これによってPrimary CoilとSecondary Coilの結合係数の密と疎を発生させ、Control ICの受信する電圧値をSin、Cosの位相に合わせた電圧値で受信することになります。ただし、このままではSin、Cosの位相波形は出力されず単なる相互誘導によるPrimary Coilの波形がSecondary Coilに出力されるだけになります。位相情報を得るためには、導電体のTargetによってPrimary Coilによって発生する磁場を乱してSin、Cos波形の位相情報にする必要があります。
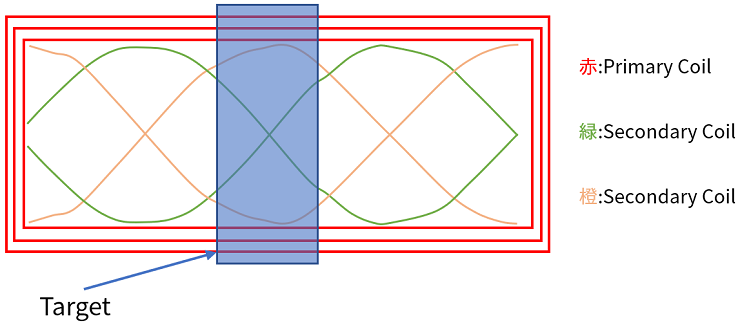
図2 Inductive Sensor 構成
図3は、TargetによるCoilからの渦電流(Eddy Current)を示したものになります。
この渦電流がTargetに流れることによって、位相情報へと変化します。
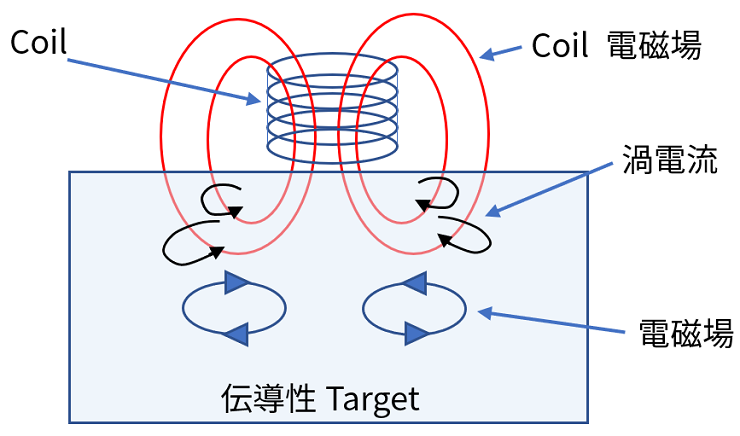
図3 Coilの磁場と渦電流
位相情報に変化することによって、Targetの位置を検出することができます。位置を算出する計算式は
Vp: Primary Coil電圧
Ns,Np: Primary Coil、Secondary Coil巻き数
As,Ap: Primary Coil、Secondary CoilがTargetで隠されている面積
k(z): TargetとCoilのカップリングファクタ
z: Airgap
Vsin、Vcosを算出しArctangentを計算することで、Targetの位置を計算することになります。Rotary Typeの角度計算も同様にして求めることができます。
Inductive Sensorは、ほこりや水滴に影響されることなく距離や角度を演算することが可能なため、非接触センサーとして摩耗することなく使用することができます。
お問い合わせ
本記事に関するご質問などは、以下よりお問い合わせください。
Microchip メーカー情報Topへ
Microchip メーカー情報Topページへ戻りたい方は、以下をクリックください。