- 半導体事業HOME
- マクニカの製品・サービス
-
技術情報

-
イベント・セミナー
- 取扱メーカー
- サポート
- お問い合わせ
- 製品購入はこちら
- 半導体事業のメルマガ登録
![]()
![]() 条件を指定して絞り込む
条件を指定して絞り込む
現在2129件がヒットしています。check

検討部品が届いた
前回までで『確実なバッティングと最速な走り』をコンセプトとしたロボット作りの構想が出来ました。
ネットで多くの部品を購入し、首を長くして待っていると、ロボットの部品が会社に到着しました。
大きい段ボールの中には数多くのセンサやモーター、基板、ジャンパーワイヤなどがギッシリでワクワクします!
自分がまだ幼いときは、ロボットのおもちゃを買ってもらって親に組み立ててもらったな・・・
そんな懐かしい思い出が蘇る、、そんな今日この頃。
まずは購入した部品が正常に動作するかチェックします!
チェックしたすべての内容を書くと途方もないので、一部抜粋でお届けします!
愉快な仲間たち『 フォトセンサ編』
早速、各部品の動作チェックをしたいと思います!
まずはフォトセンサです。
今回はバットでヒットを打った後に、ベースを一周するというルールです。
そのためには、真っ白いフィールドに引かれた黒のラインをしっかり識別しないといけません。
その役割を果たしてくれるのがフォトセンサです!
私が購入したフォトセンサーは白色を検知すると低い電圧、黒を検知すると高い電圧を出力してくれるそうですが、物体との距離によって出力が変わるとのことです。
簡易的なフィールドを作成して実験してみましょう。
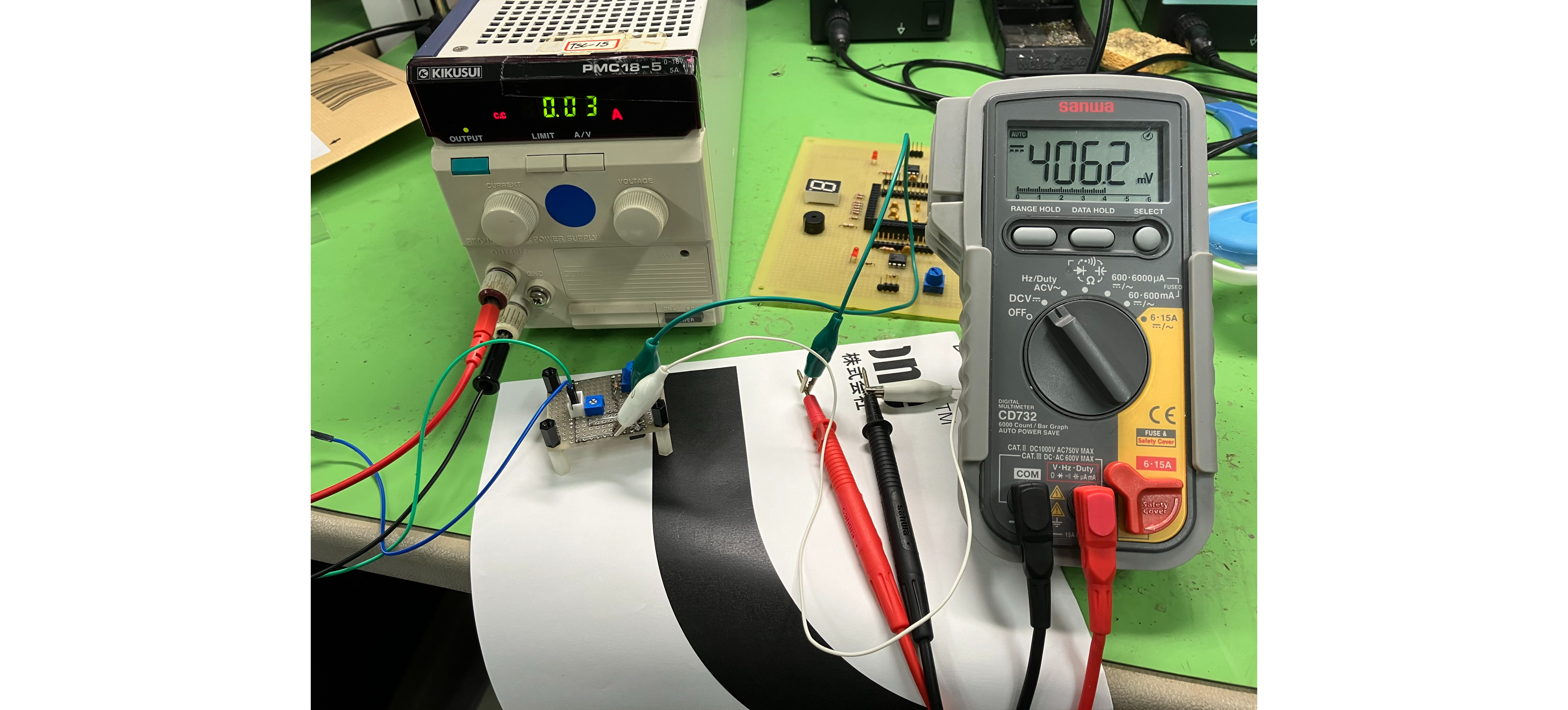
白のラインを検知している様子
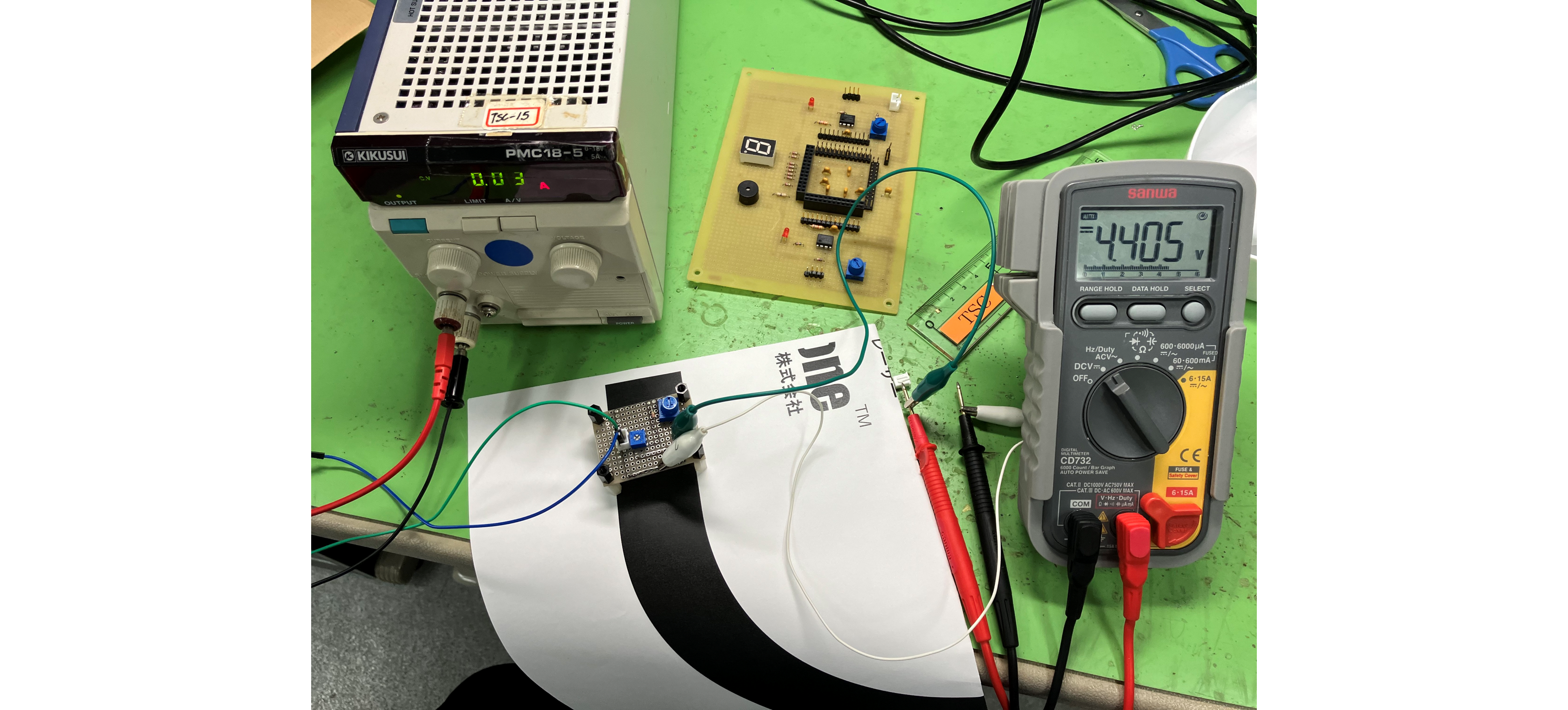
黒のラインを検知している様子
写真がとても見づらくてすみませんっ(汗)
左の写真は白の上にフォトセンサーの基板を置いた写真、右の写真は黒の上にフォトセンサーの基板を置いた写真です!
黒だと4.405V、白だと406.2mVでした。とてもハッキリ区別してくれそうです。(分かりやすい子、大好き!)
今度はフォトセンサーと地面の距離を変化させ、その差が何cmくらいがベストであるかを決めるための実験をしたいと思います。
その結果が以下の表になります。
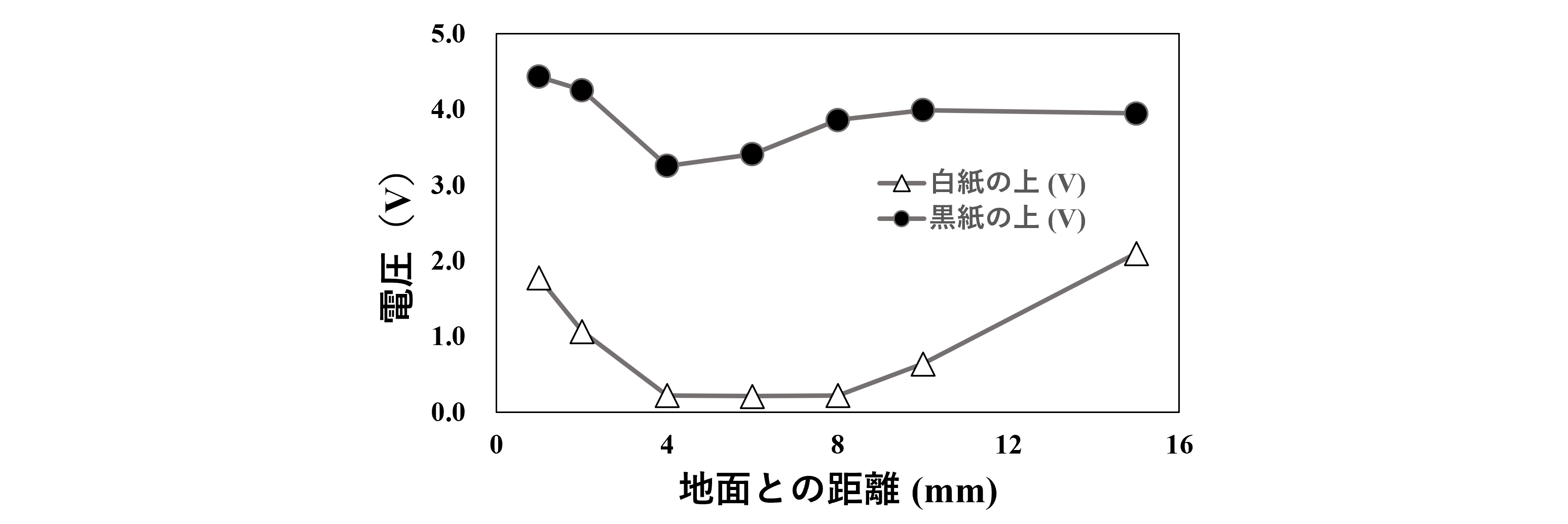
フォトセンサの距離-出力電圧
結果は上の図のようになりました。
地面との距離が近すぎても遠すぎても、白や黒を検知した時の出力にブレがありそうです。
地面との距離を6~8 mmにすれば白と黒の差が一番はっきりしそうです。
地面のラインをしっかりセンシングが出来そうでとても楽しみです。
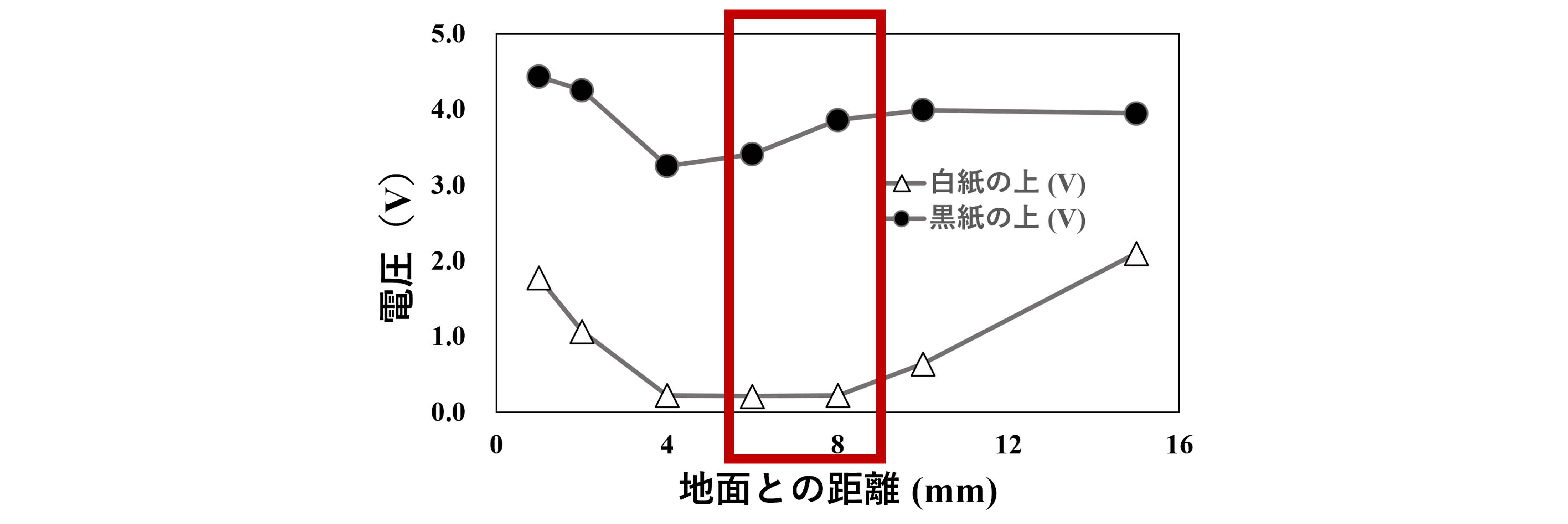
フォトセンサの距離の最適範囲
愉快な仲間たち『 調音波センサー編』
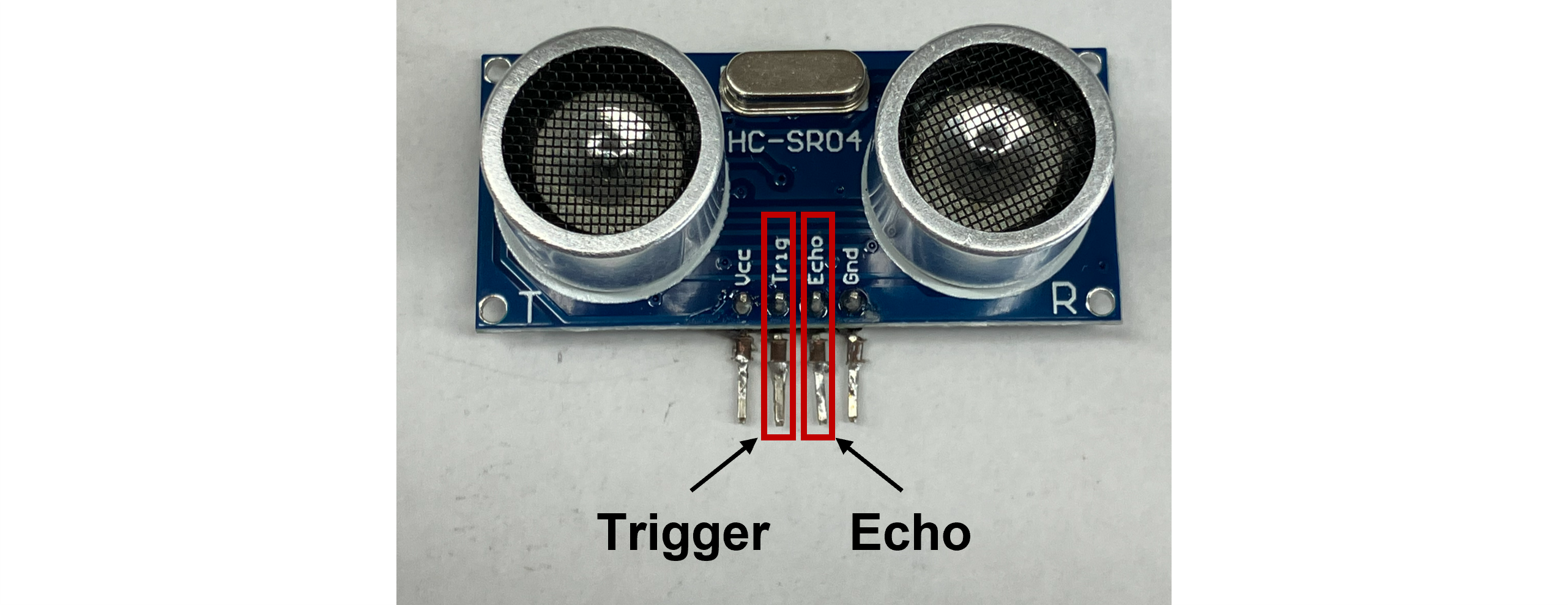
データシートには、『超音波センサのTriggerピンに1つのパルスを入力すると、Echoピンから超音波が出力される』との記載がありました。
これならファンクションジェネレーターでパルス波を作って超音波センサーに信号を送るだけですね。
ファンクションジェネレーターとオシロスコープのスイッチを入れて、ボールを転がしてっと、、
・・・あれ?ボールを検出したら波形が大きく変わるはず、、
もう一度スイッチON!!!!
(シーン)
・・・んんん?!この超音波センサは壊れているのでしょうか?全く、困ったもんですねってあれ?
うっかり超音波センサーに少し触れたその刹那、オシロスコープにボールを検知した時に出力されるであろう波形の変化が現れました。
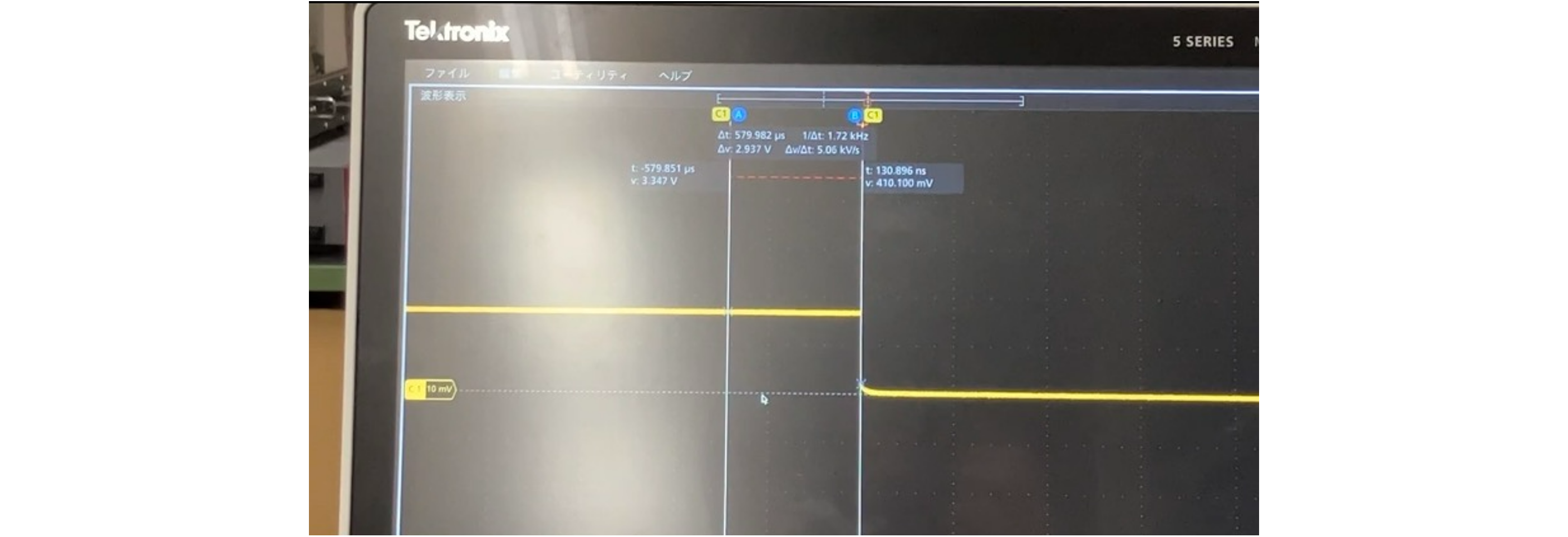
オシロスコープの波形(変化前)
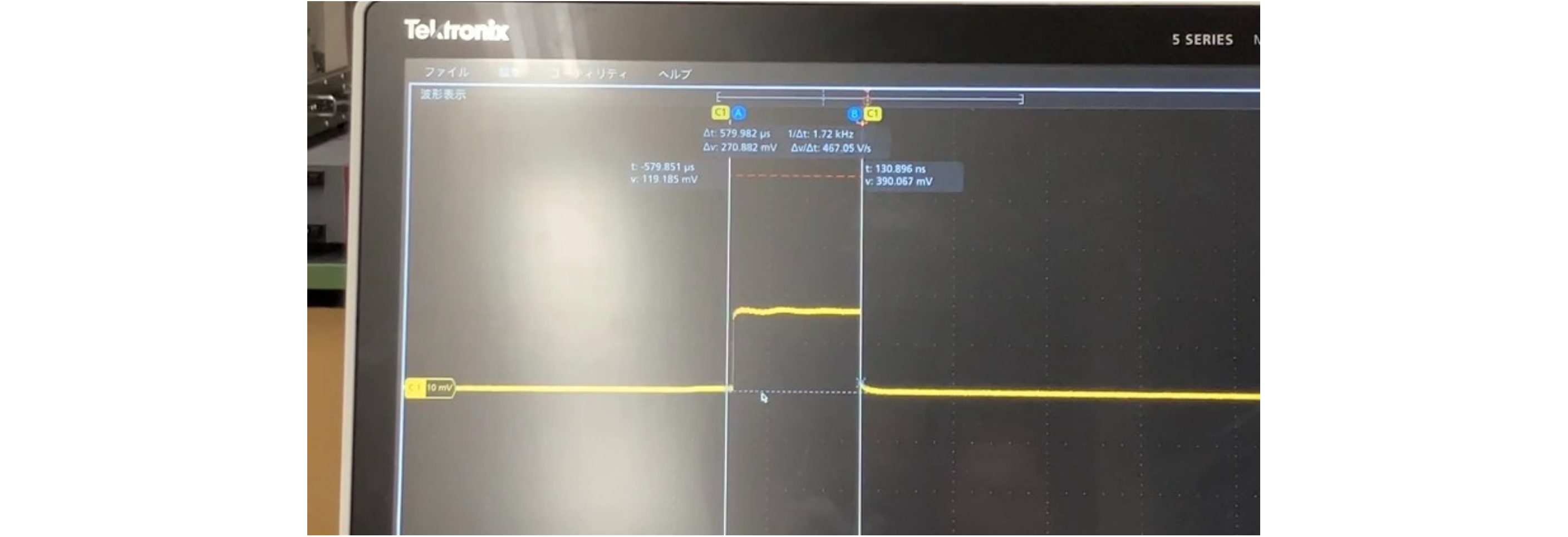
オシロスコープの波形(変化後)
も、もしかして、超音波センサーの配置位置は重要だったのではないでしょうか?!
超音波センサーは位置が悪いと地面をセンシングしてしまうし、かつ、ボールをしっかり認識できる高さに合わせて配置しないといけません。
ベストな高さを見つけるために実験をしましょう!
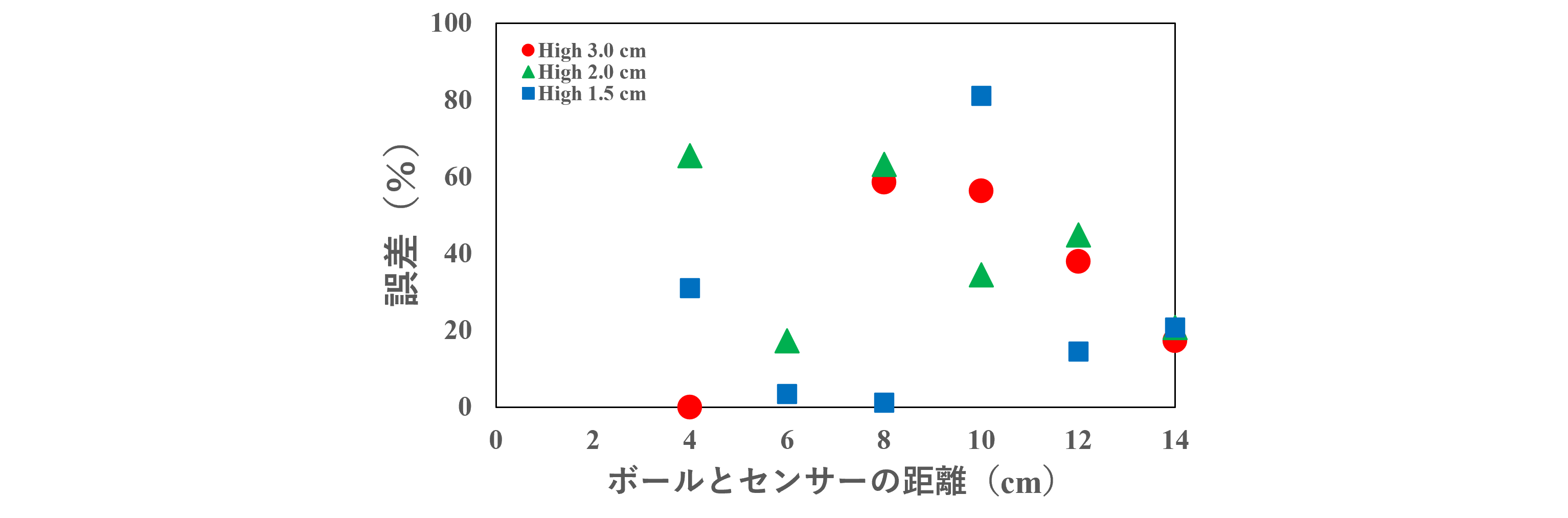
超音波センサーの実験
ふむふむ、どうやら超音波センサを置く位置は、地面から高さ1.5cm、ボールとの距離を6~8 cmにすれば実際の距離と超音波センサの測定値の誤差が少なそうですね。
実験で確認済みではありますが、改めてスイッチON!、、今度はしっかりとセンシングしてくれました。
こうして超音波センサ君は僕のロボットの大事なチームメイトになりました。ようこそ、超音波センサ!
おまけ:モーターの消費電流ってどのくらいかな?
順調(?)に部品のチェックが進む中、モーターの実験をしていると1つの疑問が浮かびました。
安定化電源とモーターを繋げ、安定化電源のモニターを見るとそこには0.22 Aの数字。
この数字はいったい何の数字でしょう。
負荷がない状態でモーターを回している様子
昨年この製作実習を乗り切ったクロちゃん先輩に聞いてみました。
私: クロちゃん先輩、この数字何ですか、
クロ: コウスケ、ちゃんとデータシート見たかのか?
私: うーん、そういえばCURRENTの項目は見ました。確か0.66 Aだったような。
クロ: どれどれ、私に見せてごらんなさい
~ 1分後 ~
クロ:なるほど。コウスケは最高効率時の電流値を見たわけだ。確かに0.66 Aと書いてある。
私:ほら言ったじゃないですか!ちゃんとデータシート読んでますよ!
クロ:甘いな、それじゃあ俺の背中には届かない。コウスケが今見なければならないのはNO LOADの項目だ、NO LOADの意味は分かるよな?
私:道がないとかですか?
クロ:それはスペルが違うな。NO LOADは負荷がない状態のことだ。今、モーターは道を走る、何かを運ぶといった負荷がないだろ?その状態だと消費電流は少なくなるんだ。NO LOADの値を見てごらん。
私:あ、0.20 Aって書いてある!
クロ:そう。若干消費電流が高いのはギアを噛ませいる分が影響しているんじゃないかな。
私:なるほど。あ、手でモーターを抑えて負荷をかけたら電流値が上がりました!!
クロ:これでモーターのことが良く分かったな。引き続き頑張れよ。
私:有難うございます!
負荷を与えて電流が上昇している様子
こうしてコウスケはまた一歩成長したのであった。
次回『ベースを駆け抜けろ、ソフトウェアでスピード制御編』でお会いしましょう。