- 半導体事業HOME
- マクニカの製品・サービス
-
技術情報

-
イベント・セミナー
- 取扱メーカー
- サポート
- お問い合わせ
- 製品購入はこちら
- 半導体事業のメルマガ登録
![]()
![]() 条件を指定して絞り込む
条件を指定して絞り込む
現在2130件がヒットしています。check

コンセプト決め 優勝するための確実な計画
ロボットの作成にあたって、今回は以下の3点が要求されています。
①ピッチャー台から転がってくる球を検知してLEDを光らせること
②バットを駆動させてボールをはじき返すこと
③ベースを一周した後にホームベースを検知して停止すること
この3つを必ず組み込まなければならないのは難しそうですね(汗)
次に大事な『コンセプト決め』です!
大谷翔平を彷彿とさせるようなバッティング力や走りのスピードを実現させるにはどのようにするべきでしょうか。
ホームランを飛ばすための強靭なバットを持った重量級ロボットが良いのか、それとも最低限のヒット狙いで迅速な速さをもった身軽なロボットが良いのか。
走りとバッティングはトレードオフの関係になりそうです(汗)。
今回はバットに当てないと走っても得点はゼロという特殊なルールがあるとのこと、ならば特殊なバットを作成して確実なヒットを狙いって最速な走りを狙います!
これに追加項目の芸術点の加点を取ることで優勝を掴みます!
その芸術点はロボットの姿を工夫することで『マクニカ愛』と『圧倒的存在感』を見せつけることで獲得することに決めました!
(最終話までロボットの姿は秘密です)
ロボットの姿(秘密)
ロボットの愉快な仲間たち
このようにして製作実習が本格的に始まりました。
『確実なヒットと最速な走り』を実現するための愉快な仲間たちを紹介します!
まずは確実にバットに当てるためのバットの紹介です。
今回は黒ひげ危機一髪の原理を利用した特殊なバットを使います。
下の写真の様にモーターが回ると中の芯が飛び出る仕組みになっています。

モーターが回転する前

モーターが回転した後
これのどこが確実ヒットのバット??といった疑問が出てくるでしょう。
安心してください。ここからが工夫ポイントになります。
確実なヒットを狙うにはどうすればよいでしょうか?
それはストライクゾーン全てを網羅できるバットを作成すればいいのです(ですよね!)
事前情報によると、ストライクゾーンは8cmの幅と聞いています。
この情報を踏まえ、今回は8cmの板を取り付けることで確実なヒットを実現します。
(意外とこの板を取り付ける作業に膨大な時間を費やします)
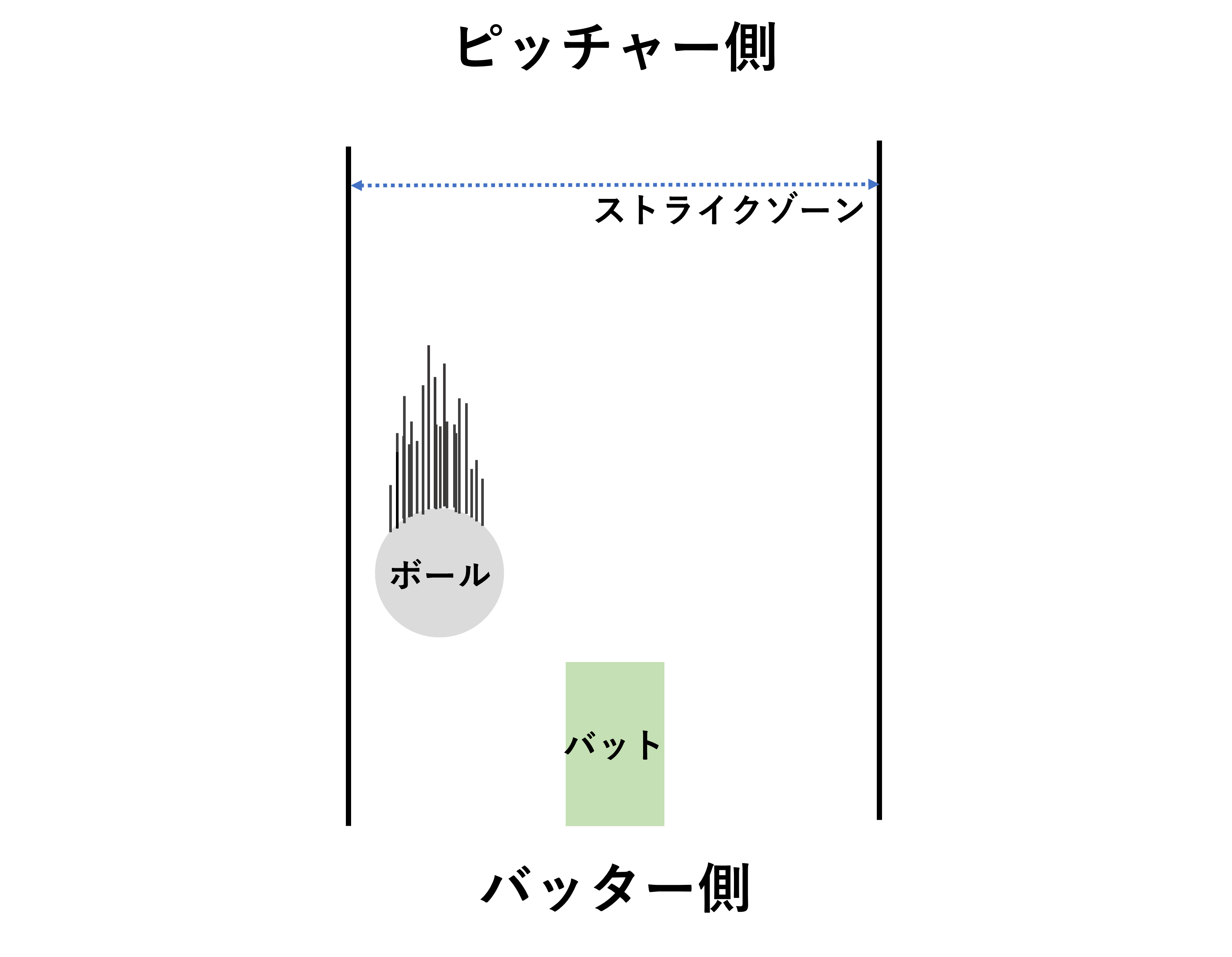
板を取り付ける前
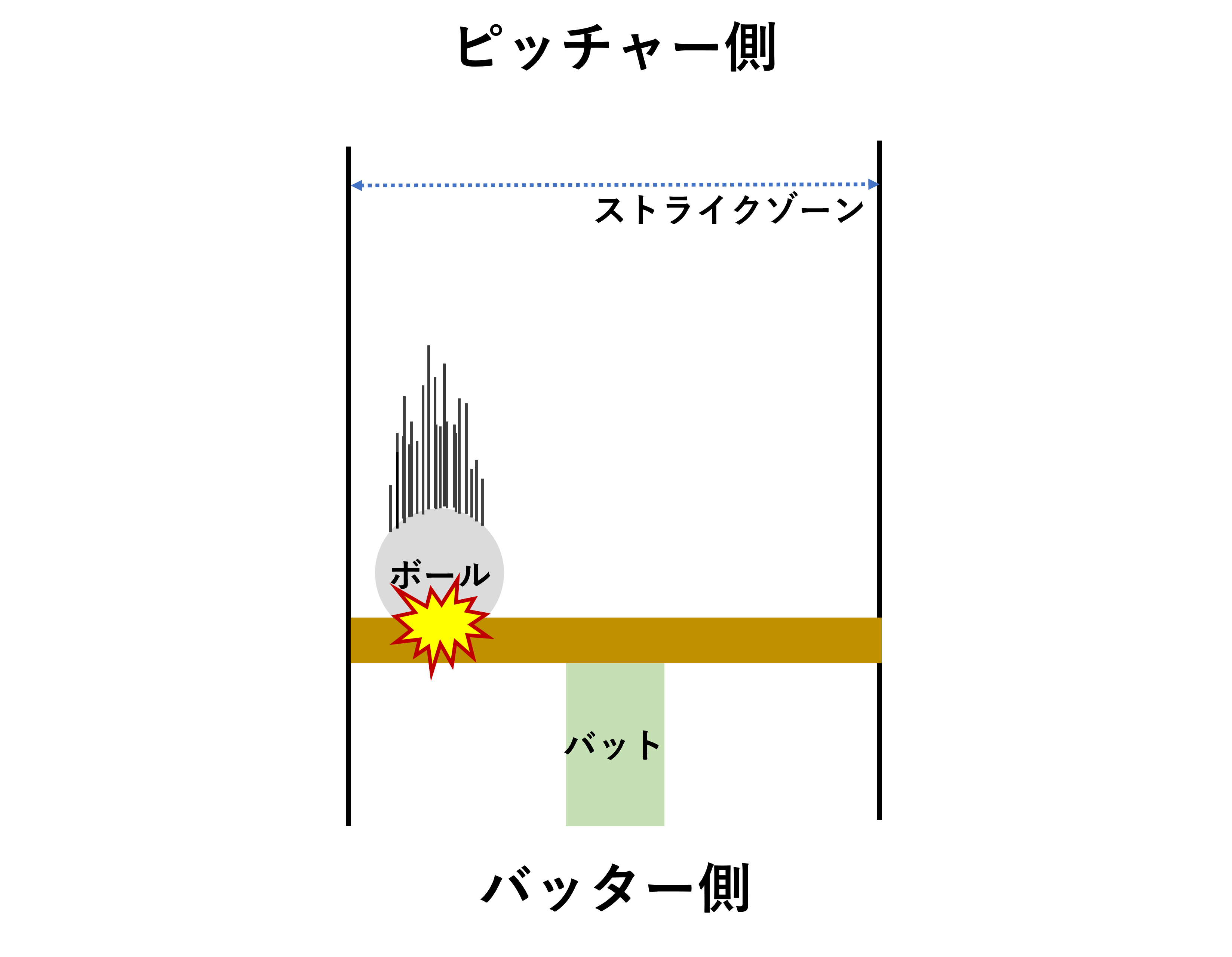
板を取り付けた後
そして次に最速の走りを実現するためのモーターです。
今回はまだどのモーターが最適なものか判断できなかったため、いろいろなモーターを購入することにしました。
最速な走りはこのモーターの選定と最適な速度で走る・曲がるを行うソフトウェア制御で実現させようと思います。
ソフトの詳細については次回以降でお伝えしようと思います!

購入したモーター
次に今回の最大の難関、動くボールを捉える秘密兵器のセンサ紹介です!
今回は使うセンサは超音波センサです!超音波センサの原理を用いてボールのセンシングを行います。
また、今回使用する超音波センサはこちらです!
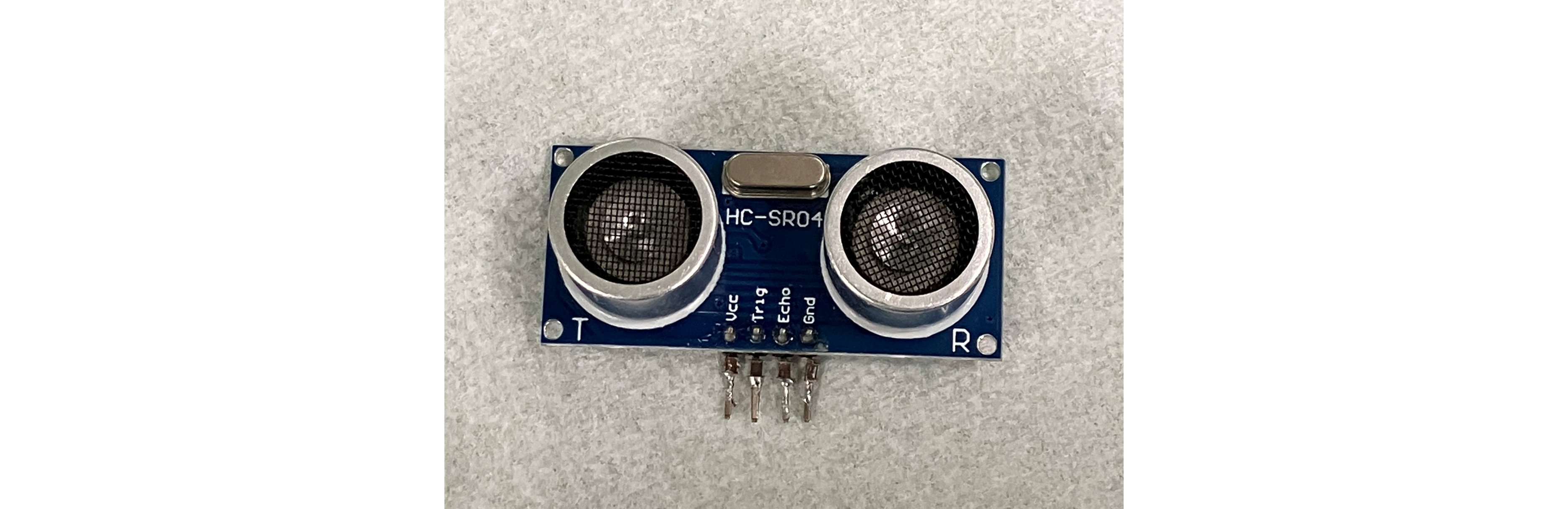
今回使用する超音波センサ
このセンサはセンシング距離が長く、見ての通りピンも4本で使いやすそうです!
また、インターネット上にもこの超音波センサを使った情報が沢山あったので選びました。
意外と優勝するのは簡単かもしれませんね!
(この時は、超音波センサの扱いの難しさを知る由もなかったのである・・・)
ロボットのブロック図と配置図
今回のロボットのブロック図はこちらです!
バッテリーを3つ用意して制御系、ライントレース、バット機構でそれぞれ電圧を供給します!これで元気もりもりにロボットが動くこと間違いなしですね!
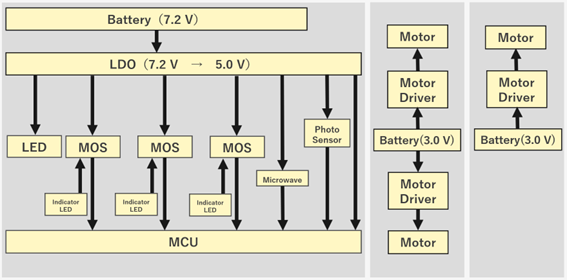
ブロック図
筐体への配置図はこちらです!
3階層構成で、1層目に電源周り、2層目にマイコン、3層目にインジケータを配置することで見た目もすっきり、ハードやソフトで問題が起きた時でもデバッグしやすい配置にしました。
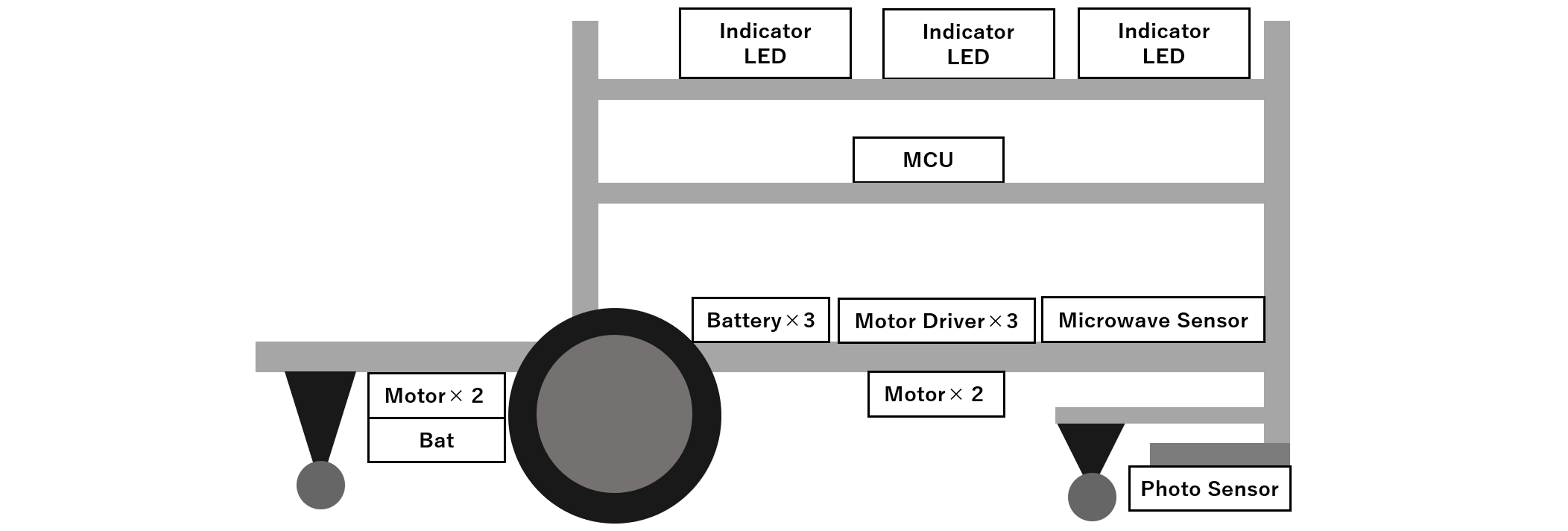
配置図
ロボットの基本的な仕様は決まりました。
しかし、まだあくまで構成が決まっただけでここからが本当の製作実習が始まります