- 半導体事業HOME
- マクニカの製品・サービス
-
技術情報

-
イベント・セミナー
- 取扱メーカー
- サポート
- お問い合わせ
- 製品購入はこちら
- 半導体事業のメルマガ登録
![]()
![]() 条件を指定して絞り込む
条件を指定して絞り込む
現在2189件がヒットしています。check

Uzuki 加速度センサ ADXL345のスケールファクタとオフセットの補正方法について紹介します
Uzukiに使われている加速度センサADXL345の出力誤差の補正方法についてお話します。
センサの出力には多少の差はあれ、必ず誤差があります。
加速度センサの誤差として、主にスケールファクタ誤差、オフセット誤差、クロスカップリングがありますが、今回はこのうちスケールファクタ誤差とオフセット誤差の補正方法について説明します。
地球の地表付近では、場所によって多少の違いがありますが、9.80665 m/s2標準重力加速度として決められています。この重力加速度は加速度の単位としても用いられ、大文字で G と書かれ、重力加速度と同じ加速度を 1.0 G のように表現します。
つまりセンサの静止状態では、鉛直方向下向きに1Gが印加されていることになります。(座標系は上方向を+としているので
重力加速度は -1Gです。)
-1Gが印加されている状態で理想出力のセンサは当然-1Gを出力しますが、実際のセンサは誤差を含む値が出力されます。
これを次の方法で補正します。
この補正方法は加速度センサADXL345に特有の補正方法ではなく、入出力が一次関数となるデータ補正の一般的な方法です。
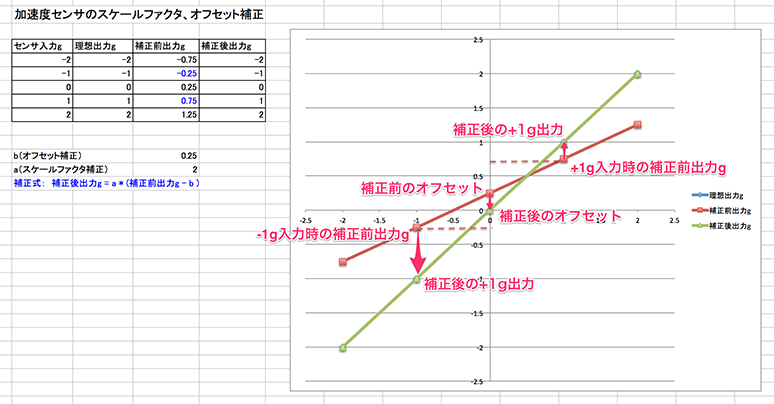
加速度センサの補正方法(スケールファクタとオフセット)
理想のセンサ出力は、入力加速度とセンサ出力が同じになるので、”y = x "と表されます。( x : 入力加速度, y : センサ出力)
これは、y = ax + b の a : 傾き = 1, b : オフセット : = 0 という理想の状態です。
ところが、実際のセンサ出力には誤差があります。
実際のセンサ出力(補正前)をy, 補正後の加速度をy'として、以下の式に従って出力を補正します。
y' = a'y + b' (y : 補正前のセンサ出力, a' : スケールファクタ補正係数, b' : オフセット補正係数)①式
①式の補正係数a', b'は、
+1G印加時の補正前センサ出力測定値をy+, -1G印加時の補正前センサ出力測定値をy-を、
下記式②、③に代入して計算します。
b' = { (y+) + (y-) }/2 ②式
a' = 2 / { (y+) - (y-) } ③式
このa', b' を下記式④に代入すると、
補正後出力:y' = a' * (y - b' ) ④式
が得られます。
以上の操作によって、スケールファクタ誤差とオフセット誤差が補正されます。
(補正前後の出力については上の図を参照してください。赤が補正前、黄緑が補正後の各出力です。)
この操作をキャリブレーションといい、センサの誤差は個体差があるため、
キャリブレーションは1つ1つのセンサ毎に必要なプロセスです。