- 半導体事業HOME
- マクニカの製品・サービス
-
技術情報

-
イベント・セミナー
- 取扱メーカー
- サポート
- お問い合わせ
- 製品購入はこちら
- 半導体事業のメルマガ登録
![]()
![]() 条件を指定して絞り込む
条件を指定して絞り込む
現在2136件がヒットしています。check

モータードライブにおける電流検出アーキテクチャーの概要
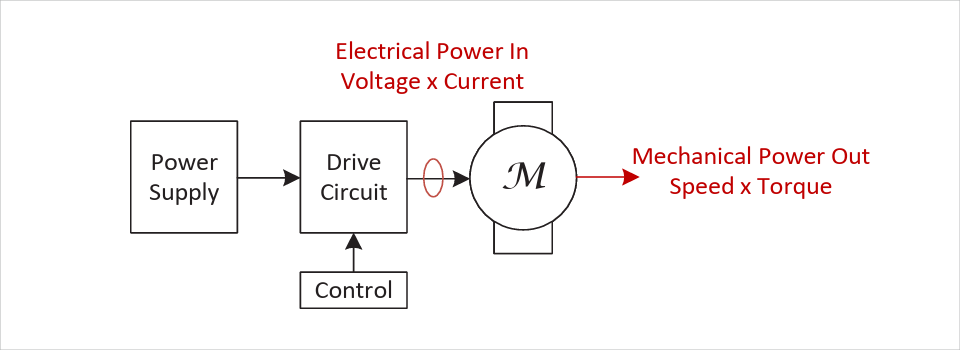
電流センサーのより一般的な用途の 1つは、モータードライブの幅広いアプリケーションです。モーターは電気機械システムであり、電気エネルギー(電圧と電流)を機械エネルギー(トルクと速度)に変換します。モーターの適切な動作には、適切に制御された電気駆動が必要であり、これにはモーターの1つまたは多数のコイルを流れる電流の正確な測定が必要です。
従来、モーターはそのタイプに基づいていくつかのカテゴリーに分類できます。モーターは、一般的なモーターで 1相(またはモーターコイル)から最大 3相まであり、ステッピングモーターやブラシレス DC などのモータータイプではさらに高い相数も可能です。モーターのタイプが異なれば、必要なパワードライバー回路や推奨される電流検出方式も異なります。
| カテゴリー | ブラシ付き DC (BDC) | ユニバーサル | 単方向ステッパー | 双方向ステッパー | ブラシレス DC (BLDC) | スイッチトリラクタンス (SRM) | AC 誘導 (ACIM) |
| 整流 | 機械式 | 機械式 | 電気式 | 電気式 | 電気式 | 電気式 | 電気式 |
| 入力制御 | DC | ACまたはDC | AC | AC | AC | AC | AC |
| 代表的な相数 | 1 | 1 | 2(センタータップ) | 2 | 単相:1 三相:3 |
3 | 1または3 |
| 代表的なパワードライバー回路 | ローサイド/ハイサイド MOSFET または H ブリッジ | トライアック | 4つのローサイド MOSFET と再循環ダイオード | 2つのHブリッジ | 単相:Hブリッジ 三相:3つの1/2-Hブリッジ |
三相非対称ブリッジ または三相ミラーインバーター |
トライアックまたは 三相可変周波数ドライブ |
| 代表的な電流検出方式 | 1x ハイサイド/ローサイド または1x インライン |
1x 絶縁インライン または1x ローサイド |
4x ローサイド | 2x ハイサイド/ローサイド または2x インライン |
1x, 2x, または 3x ハイサイド/ローサイド または2x/3x インライン |
3x ハイサイド/ローサイド または3x インライン |
2x/3x ローサイド または2x/3x 絶縁インライン |
ブラシ付き DC モーターとユニバーサルモーターは機械的な整流機能を備えており、DC 電圧が印加されると常に回転します。これらのモータータイプでは、電流検出はモーターの負荷(トルク出力)を判断したり、故障状態(例えば、モーターの巻線ショート)を検出するために使用されます。ブラシ付き DC モーターとユニバーサルモーターのユニークな電流検出アプリケーションの 1つにリップルカウンティングがあります。これは、モーター電流を正確に測定して整流子の動きによる電流リップルを検出し、モーター速度を測定するものです。
他のモータータイプは電気的な整流を必要とします。これは、システムコントローラーがモーターの状態(電圧、電流、ローター位置)を測定して、モーターの駆動方法を決定する必要があることを意味します。したがって、電流検出は、ブラシ付き DC の場合と同じ機能を果たすだけでなく、各モーターコイルの電流をリアルタイムで測定してモーターを適切に整流し、回転させ続ける必要があります。例えば、ブラシレス DC モーターの制御アルゴリズムでは、モーターを整流するために電流センサーのフィードバックが必要になることがあります。これらのモータータイプは通常、位相電流を測定し、計算をおこない、パワードライバー回路に新しい出力を適用するのに十分な帯域幅を持つ電流センサーを必要とします。このリアルタイム制御ループは、モーターの性能目標をサポートするのに十分な速さで、かつ総遅延時間が十分に短いレートで動作する必要があります。
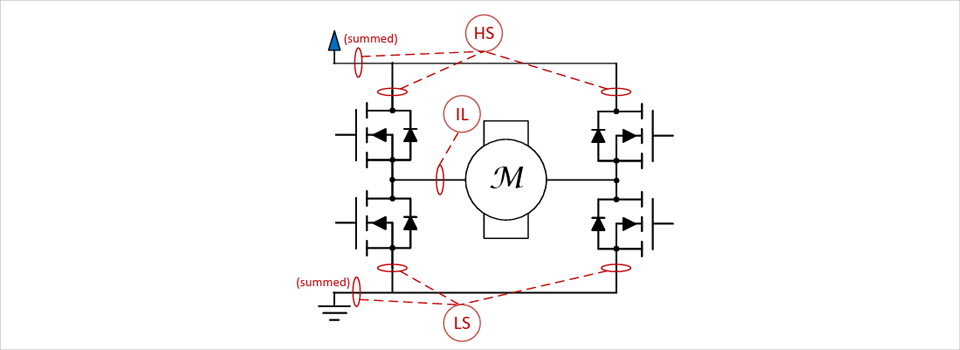
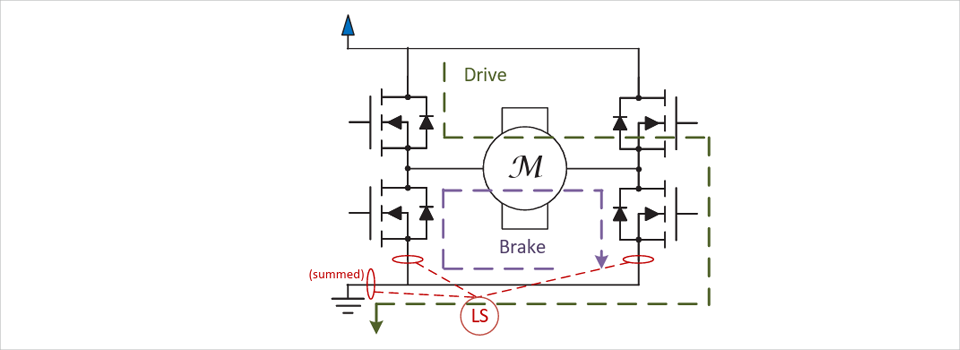
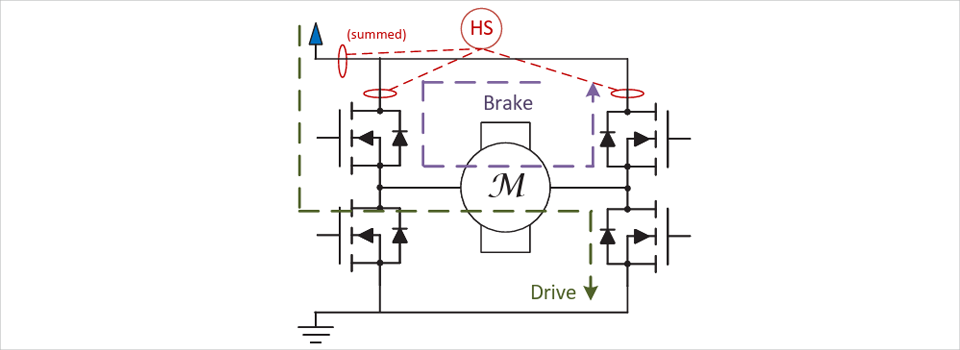
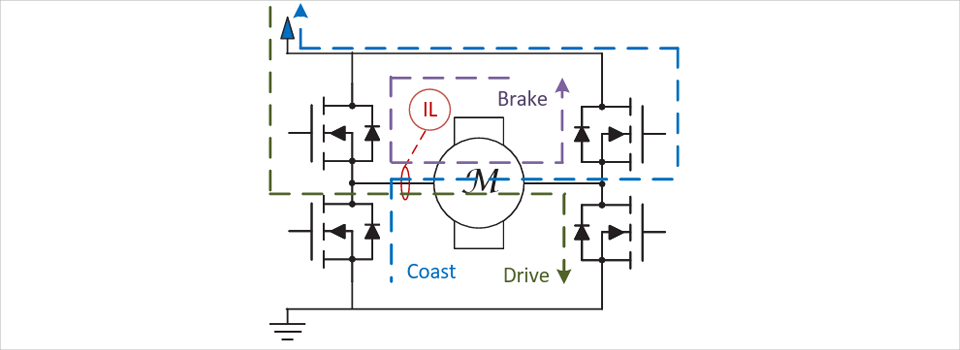
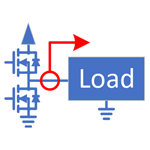
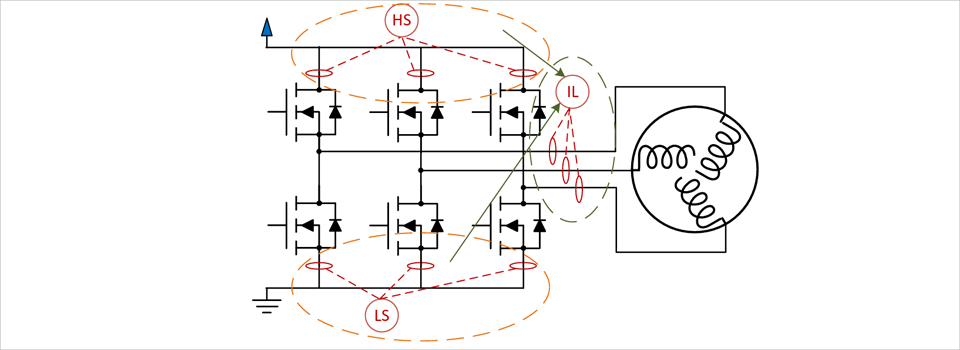
これらの考慮事項に加えて、モータードライバー回路には、パワードライバー回路内に電流センサーを配置するための複数の可能な構成があります。例えば、ブラシ付き DC モーターのドライバー回路は Hブリッジであり、モーター電流は多くの異なる場所の 1つ(または複数)で測定できます。ローサイド (LS) 測定は、1/2-Hブリッジの「下側レッグ」で、または両方の Hブリッジレッグを組み合わせた1つの合計測定としておこなわれます。ハイサイド (HS) 測定も同様に、1/2-Hブリッジの上部で各レッグごと、または合計されたハイサイドとしておこなうことができます。単一のインライン (IL) 電流測定は、1相しかないため、モーターと直列に使用できます。
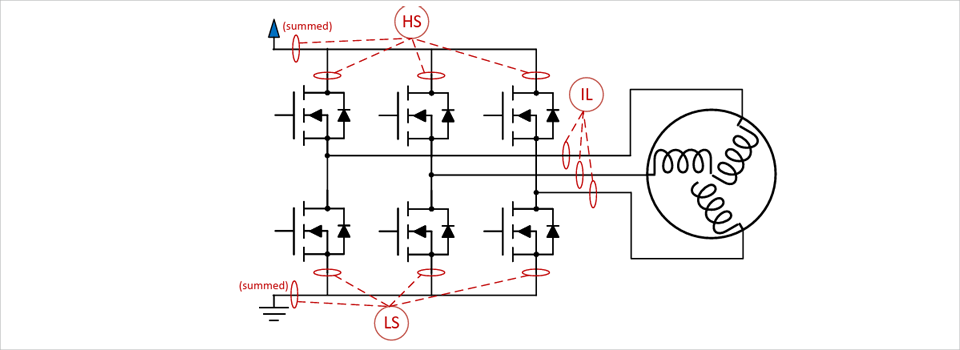
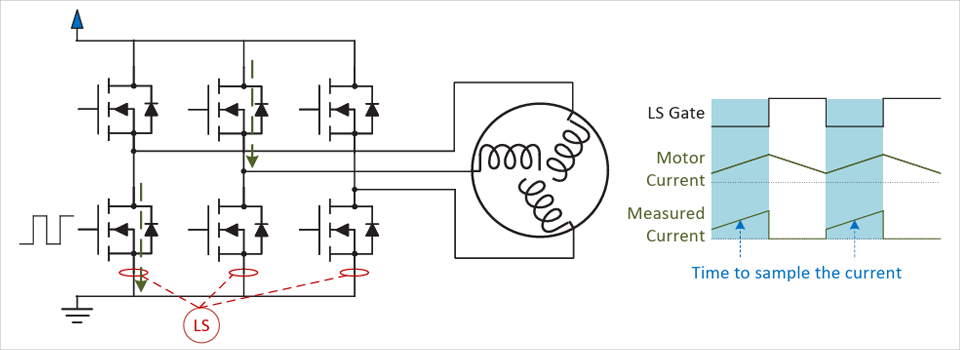
三相ブラシレスモータードライバー回路は、ブラシ付き DC の場合と似ていますが、電流を測定できる可能性のあるポイントがより多く存在します。2つの 1/2-Hブリッジの代わりに、3つあります。インライン電流測定は3つのモーター位相で発生する可能性がありますが、キルヒホッフの電流則 (I_A + I_B + I_C = 0) に基づいて、3つのうち 2つだけを測定することで済ませることが数学的に可能です。
ローサイド電流検出
ローサイド電流検出は、多くのモータータイプで最も一般的な方法と見なされています。コストに敏感なアプリケーション、例えばブラシ付き DC モーターアプリケーションでは、ローサイド電流検出を使用する傾向があります。ローサイド電流センサーは、各 1/2-Hブリッジの脚または位相を流れる電流、あるいは単一の合計電流として検出するように構成できます。ローサイド電流検出方法は、部品の観点からは最も低コストの選択肢ですが、設計者にはいくつかのシステムレベルの課題を提示します。
ローサイド電流検出には、いくつかの明確な利点があります。
・センサー位置でのコモンモード電圧が低い、またはグランドに近い
・センサーは低電圧定格を持つことができ、絶縁を必要としない場合がある
・ローサイド MOSFET がオンのときに、センサーはバッテリーへのシステムショートを検出するために使用できる
しかし、いくつかの重要な欠点があります。
・センサーはグランドへのシステムショートを検出できない
・センサーは、対応するローサイド MOSFET がオンのときにのみ電流を測定できる
・コントローラーは、センサーの読み取りを PWM と慎重に同期させる必要がある
・センサーは、PWM 中にサンプリングするために高い帯域幅を必要とする
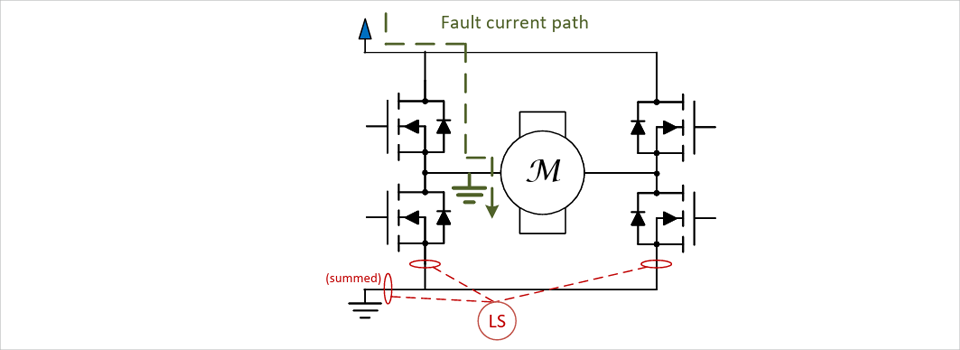
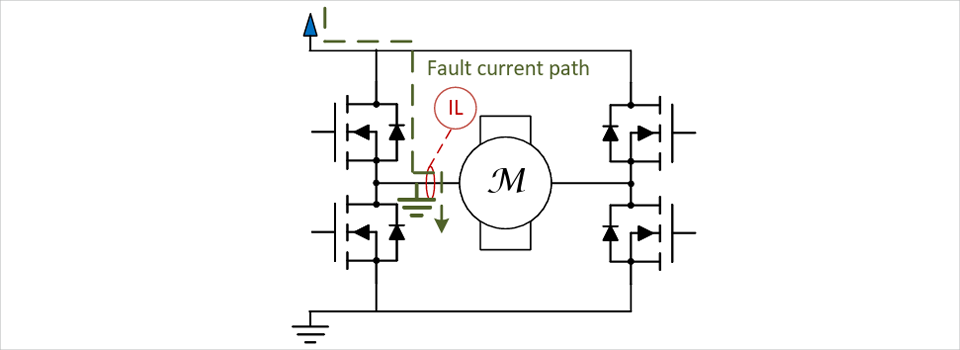
グランドへのシステムショートは、例えば緩んだワイヤーがシャーシに接触するなど、古典的に最も一般的な故障メカニズムですが、ローサイド電流センサーはそれを検出できません。モーター端子でのグランドへのショートは、ローサイド電流センサーをバイパスする電流経路を生じさせます。この故障がシステム設計者にとって重要な考慮事項である場合、ローサイド電流センサーはシステムを保護するための良い解決策ではありません。
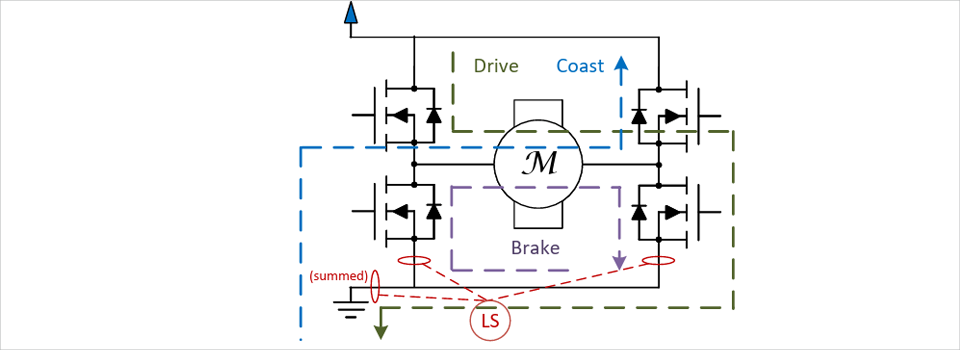
ローサイド電流検出方式を使用する場合、モーター電流は、電流センサーの位置に応じて、ドライバーの特定の動作モード中にのみ測定可能です。ブラシ付き DC モーターを例にとると、モーターへの駆動電流は、1つの脚と共通のグランドを流れる電流となり、どちらでも電流を検出できます。しかし、両方のローサイド MOSFET がオンになっているブレーキモードでは、電流は共通のグランドに戻ることなく両方のローサイド MOSFET 間を再循環します。1/2-Hブリッジの脚用の個別のローサイドセンサーはこの電流を検出しますが、合計されたローサイド電流センサーは検出しません。ブレーキモードが 2つのローサイド MOSFET ではなく 2つのハイサイド MOSFET で実装されなければならない場合、ローサイド電流センサーは電流を検出できません。再循環電流は、モーターが外部から回転させられ、事実上発電機として機能するシステムで測定することが重要になる場合があります。
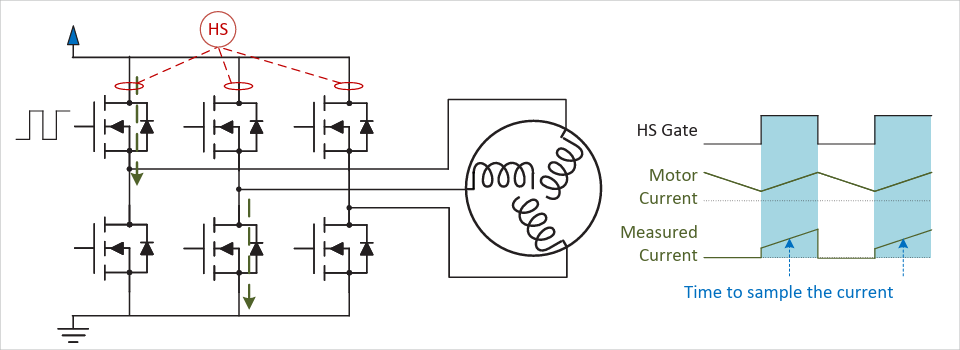
モーター電流をサンプリングする戦略は、ローサイド電流センサーの選択にも影響されます。システムコントローラーは、モータードライブのパルス幅変調 (PWM) と測定のタイミングを慎重に合わせる必要があります。なぜなら、センサーは対応するローサイド MOSFET がオンのときにのみ電流を検出できるからです。これは、PWM 周波数が非常に高い場合や、PWM デューティーサイクルが非常に高い場合にタイミングの問題を引き起こす可能性があります。どちらの状況も、ローサイド MOSFET のオン時間が非常に短くなる可能性があり、したがって真のモーター電流を捉えるための窓が非常に狭くなります。電流センサーの帯域幅は、この窓の中で電流を適切にサンプリングするのに十分な高さが必要であり、電流センサーのセトリングタイムも、窓の中で使用可能な時間に大きく影響します。
磁気電流センサーを使用してローサイド電流検出を実装することは、センス抵抗ベースのソリューションに比べていくつかの利点があります。磁気センサーは、電流シャント抵抗と電流シャントアンプに比べてソリューションサイズが小さくなる可能性があり、したがって基板サイズを縮小できます。極端な過電流が発生した場合、センス抵抗は断線故障する可能性があり、その結果、全供給電圧が電流センスアンプの入力にかかることになります。このイベントは、電流センスアンプ、そして場合によっては基板上のさらなる回路への連鎖的な故障を引き起こす可能性があります。磁気センサーは非導電性であり、したがって導体がオープン状態に溶断した場合に追加の絶縁を提供します。
ローサイド電流検出アプリケーション用の磁気電流センサーを選択する際には、考慮すべきいくつかのパラメーターがあります。それは、検出する電流の範囲、検出極性、および帯域幅です。電流センサーの極性は、単方向または双方向のいずれかです。単方向センサーは、一方向に流れる電流を測定するために最適化されたダイナミックレンジを持っていますが、双方向出力はどちらの方向に流れる電流も測定できます。ローサイド電流センサーを実装する多くのシステムでは、測定する公称駆動電流が共通のグランドに向かって一方向にしか流れないため、単方向出力を使用できます。しかし、一部のシステムでは、逆方向に電流が流れる再循環状態(コーストまたはブレーキ)で動作しているときに電流を測定するために、双方向の電流検出方式を選択することがあります。双方向センサーは、出力ダイナミックレンジの約半分を犠牲にすることで、単方向検出システムで使用できます。ほとんどのマイクロコントローラーの ADC リソースは、磁気電流センサーの出力よりも大幅に高い分解能を持っているため、システム精度は双方向センサーを単方向センサーの代わりに使用することによって影響を受けないことが多いです。
ローサイド電流センサーを使用する場合、ドライバー段が PWM 中にオン・オフするのにセンサーが十分に速く反応できるように帯域幅を選択する必要があります。実際のモーター電流は、モーターが大きなローパスフィルターとして機能するため、それほど高い帯域幅を持たないかもしれません。しかし、ローサイド MOSFET がオンになっている PWM 期間中に電流を適切に測定するためには、電流センサーは PWM 周波数よりも大幅に高い帯域幅(例えば 2倍以上)を持つ必要がありますが、これは特定の設計要件に依存します。
以下に、ローサイド電流検出デバイスの選択例をいくつか示します。
| 入力パラメーター | ケース1 | ケース2 |
| 電流検出範囲 (A) | 9A | 9A |
| 検出極性 | 双方向 | 単方向 |
| PWM 周波数 (Hz) | 20kHz | 60kHz |
| ターゲットデバイス | ACS71240 | ACS730 |
| 正当化 | 双方向または単方向を選択可能、10A の電流範囲をサポート(次に高いオプション)、帯域幅は 120kHz で 20kHz より十分高い | 双方向、20A の電流範囲(次に高いオプション)、帯域幅は 1MHz で 60kHz より十分高い |
| 代替デバイス | ACS711 | – |
| 正当化 | 双方向、10A の電流範囲をサポート(次に高いオプション)、帯域幅は 100kHz で 20kHz より十分高い | – |
ハイサイド電流検出
ハイサイド電流検出は、モーター電流を検出するための代替方法です。ハイサイド電流センサーは、ローサイドの場合と同様に、各 1/2-Hブリッジの脚または位相を流れる電流、あるいは単一の合計電流として検出するように構成できます。ハイサイド電流検出方法は、通常、ローサイドよりも高い部品コストを提示しますが、インライン電流検出よりはわずかに低い場合があります。
ハイサイド電流検出には、ローサイド検出に対する1つの重要な利点があります。
・ハイサイド MOSFET がオンのときに、センサーはグランドへのシステムショートを検出できます。
しかし、いくつかの欠点があります。
・センサーは高いコモンモード電圧定格または絶縁を必要とします。
・センサーは電源へのシステムショートを検出できません。
・センサーは、対応するハイサイド MOSFET がオンのときにのみ電流を測定できます。
・コントローラーは、センサーの読み取りを PWM と慎重に同期させる必要があります。
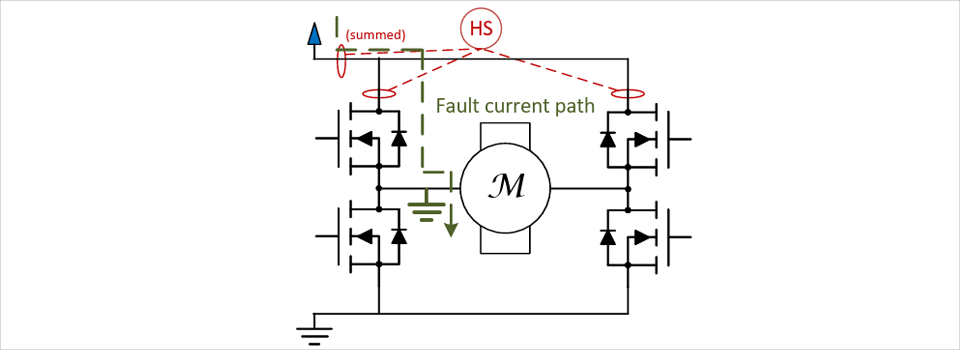
ハイサイド電流センサーは、主にお客様がシステムレベルのグランドへのショートを検出しなければならない場合に使用されます。前述のように、これは最も一般的な故障メカニズムである可能性があります。ローサイド検出の場合、故障電流経路はセンサーをバイパスします。ハイサイド電流センサーが使用されると、故障電流は電流センサーを流れ、この故障モードはシステムが対応できるように適切に検出できます。
ローサイド電流センサーとは異なり、ハイサイド電流センサーは高いコモンモードでの動作を必要とします。センサーは、グランドではなく、電源またはバッテリーに基準を置きます。供給電圧が十分に高い場合、絶縁型電流センサーが良い選択肢となります。このより高い電圧範囲は、通常、ローサイド電流センサーに比べてより高価な部品になります。
ハイサイド電流センサーは、ローサイドの場合と同様に、ドライバーの特定の動作モード中にのみモーター電流の測定を可能にします。再び、ブラシ付き DC モーターを使用すると、モーターへの駆動電流は、共通の電源と 1つの脚を流れる電流となり、どちらでも電流を検出できます。しかし、両方のハイサイド MOSFET がオンになっているブレーキモードでは、電流は共通のグランドに戻ることなく両方のハイサイド MOSFET 間を再循環します。1/2-Hブリッジの脚用の個別のハイサイドセンサーはこの電流を検出しますが、合計されたハイサイド電流センサーは検出しません。ブレーキモードが 2つのハイサイド MOSFET ではなく 2つのローサイド MOSFET で実装されなければならない場合、ハイサイド電流センサーは電流を検出できません。
電流検出測定は、ハイサイド電流センサーの選択に影響されます。PWM 同期が必要です。ハイサイドセンサーは、対応するハイサイド MOSFET がオンのときにのみ電流を検出できます。これは、PWM 周波数が非常に高い場合や、PWM デューティーサイクルが非常に低い場合にタイミングの問題を引き起こす可能性があります。どちらの状況も、ハイサイド MOSFET のオン時間が非常に短くなる可能性があり、したがって真のモーター電流を捉えるための窓が非常に狭くなります。
再び、磁気電流センサーを使用してハイサイド電流検出を実装することは、センス抵抗ベースのソリューションに比べていくつかの利点があります。磁気センサーは、センス抵抗と外部シャントアンプよりも小さくすることができます。多くの磁気電流センサーには、高い供給電圧をサポートするための基本的なまたは強化された絶縁が組み込まれており、これにより基板上の部品の必要性がさらに減少します。
ハイサイド電流検出アプリケーション用の磁気電流センサーを選択する際には、設計者は動作電圧定格に加えて、電流、検出極性、および帯域幅を考慮する必要があります。ローサイド電流センサーの場合と同様に、ハイサイド電流センサーは単方向または双方向である場合があります。システムは、モーターに電流を駆動するときの出力のダイナミックレンジを最大化するために、単方向出力を実装することがあります。あるいは、双方向電流センサーを使用することで、システムは再循環モード(ブレーキまたはコースト)で電流を測定できます。再び、双方向センサーは、ダイナミックレンジを犠牲にして単方向検出システムで使用できます。
ハイサイド電流検出のためのセンサー帯域幅は、ローサイド電流検出と同様に考慮する必要があります。センサーの帯域幅は、システムがハイサイド MOSFET がオンのときにのみモーター電流を測定できるため、PWM 周波数よりも大幅に高くする必要があります。ハイサイド磁気電流センサーの場合、デバイスはシステムの全供給電圧に耐えることが期待されます。部品の動作電圧定格は、モーターの通常および異常な動作中のいかなる供給変動に対しても十分なマージンを提供するように選択する必要があります。多くの高電圧システムでは、機能的、基本的、または強化された絶縁の要件があり、それも選択するデバイスで考慮する必要があります。
以下に、ハイサイド電流検出デバイスの選択例をいくつか示します。
| 入力パラメーター | ケース1 | ケース2 |
| 電流検出範囲 (A) | 9A | 9A |
| 検出極性 | 双方向 | 単方向 |
| PWM 周波数 (Hz) | 20kHz | 60kHz |
| 供給電圧絶対最大値 (V) | 24V バッテリー, 55VDC abs max | 240VAC |
| ターゲットデバイス | ACS711LC | ACS730LC |
| 正当化 | 100V の絶縁電圧は 55V abs max をカバー、双方向、10A の電流範囲をサポート、帯域幅は 100kHz で 20kHz より十分高い | 2500Vp (1767VRMS) の絶縁電圧、双方向、20A の電流範囲(次に高いオプション)、帯域幅は 1MHz で 60kHz より十分高い、過電圧カテゴリー (OVC) II |
| 代替デバイス | ACS71240LC | ACS732LA/MA |
インライン電流検出
インライン電流検出は、モータードライブ回路の 3番目の選択肢です。インライン電流検出は、モーター巻線と直列に電流を測定することにより、ローサイドおよびハイサイド検出の両方の欠点の一部を解決します。インライン電流検出方法は、特にセンス抵抗ベースの電流検出方法を使用する場合、通常、ローサイドまたはハイサイド電流検出の両方よりも高い部品コストを提示します。
インライン電流検出には、ローサイドおよびハイサイド検出に比べていくつかの大きな利点があります。
・センサーは、パワー MOSFET の状態に関係なく電流を測定できます。
・コントローラーは、センサーの読み取りを PWM と同期させる必要がありません。
・ハイサイド MOSFET がオンのときに、センサーはグランドへのシステムショートを検出できます。
・ローサイド MOSFET がオンのときに、センサーはバッテリーへのシステムショートを検出するために使用できます。
しかし、いくつかの重要な欠点があります。
・センサーは高いコモンモード電圧定格または絶縁を必要とします。
・センサーは非常に高いコモンモード除去比を必要とします。
・単一の「合計」インライン電流センサーを持つ方法はありません。
インライン電流センサーは、システムレベルのグランドまたは電源へのショートのいずれかを検出するために使用でき、これら 2つの故障モードのいずれかが発生したかどうかを判断するためのシステム診断に最も役立ちます。両方の故障モードの検出を必要とするお客様にとって、インライン電流検出は、システムにローサイドとハイサイドの両方の電流センサーを使用するよりも優れた代替手段です。
ハイサイド電流センサーと同様に、インライン電流センサーは高いコモンモードでの動作を必要とします。これには、センサーが高い電圧をサポートするか、内蔵の絶縁を持つ必要があります。しかし、インライン電流センサーはコモンモードを非常によく除去する必要もあります。
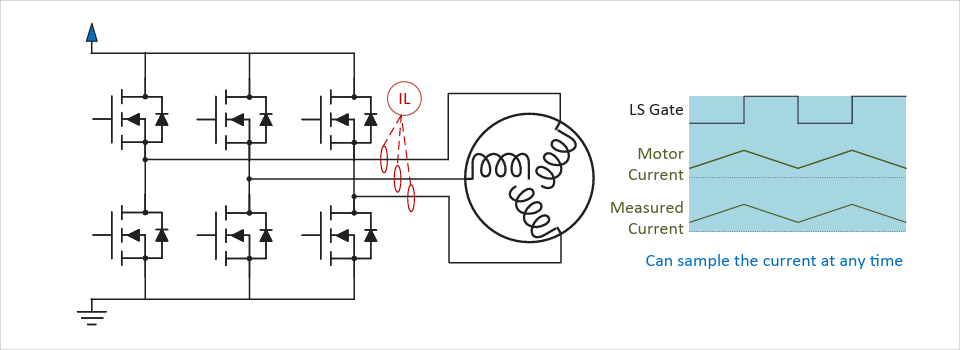
モータードライバーがモーターに PWM を適用すると、位相はロー(グランドに近い)とハイ(電源に近い)の間で交互に変化します。インライン電流センサーは PWM の上に「乗って」います。インライン電流検出に使用されるセンサーは、非常に強力な同相除去比 (CMRR) を持っていなければならず、さもなければセンサー出力は出力が切り替わるたびに大きく影響を受けます。
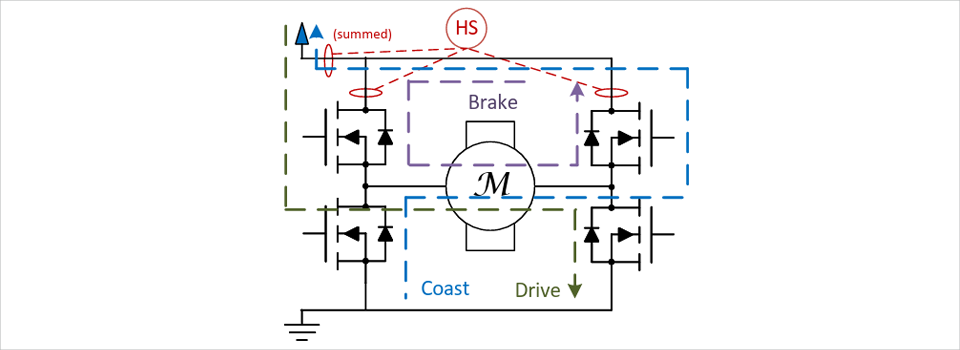
インライン電流検出は、センサー出力が実際のモーター電流を適切に反映する条件を大幅に簡素化します。ローサイドおよびハイサイド電流センサーの場合、対応する MOSFET がオンで導通状態にあり、モーター電流を電流センサーを通して流して出力を生成する必要があります。しかし、インライン電流センサーにはそのような制限はありません。インライン電流センサーは、モーター巻線と直列に電流を測定しており、これはドライブ回路のパワー MOSFET の状態に関係なく、常にモーター電流を代表しています。電流は、駆動、コースト、ハイサイドブレーキ、またはローサイドブレーキで適切に測定できます。
インライン電流検出は、コントローラーがモーター電流をサンプリングする方法を大幅に簡素化します。コントローラーは、適用される PWM に関係なくいつでもセンサー出力をサンプリングできます。なぜなら、電流センサー出力は常にモーター電流を代表しているからです。インライン電流検出は、PWM 周波数が非常に高いシステム、または非常に高いまたは非常に低いデューティーサイクルを必要とするシステムで明白な選択肢となります。なぜなら、ローサイドおよびハイサイド電流センサーは、適切なタイミングでセンサー出力を捉えようとするときにタイミングの問題を提示する可能性があるからです。インライン電流検出は、長期間にわたってモーター電流をはるかに簡単に平均化することを可能にします。これは、ローサイドまたはハイサイド電流センサーを使用して行うのは簡単ではありません。
磁気センサーを使用したインライン電流検出は、センス抵抗ベースのソリューションに比べていくつかの注目すべき利点があります。同様にローサイドおよびハイサイドの場合と同様に、磁気センサーは、より小さな総ソリューションサイズ、過電流の場合の追加の保護、および内蔵の絶縁を備えています。インライン電流検出はまた、同相除去比を改善できる磁気センサーにとってシステムレベルの利点をもたらします。センス抵抗ベースのソリューションは、センス抵抗間の電圧降下を介して電流を測定しています。モーターに PWM が適用されると、センス抵抗の電圧とアンプの同相は、その電圧の変化を経験し、それを除去する必要があります。磁気センサーは、電流を決定するために電圧を測定するのではなく、電流によって生成される磁場を測定します。このため、磁気センサーは PWM に対してはるかに免疫があります。
インライン電流検出アプリケーション用の磁気電流センサーを選択する際には、電流、検出極性、帯域幅、および動作電圧定格の 4つのパラメーターを考慮する必要があります。インライン電流センサーの位置のため、双方向の検出極性が最も有用です。電流はモーター巻線内でどちらの方向にも流れる可能性があるため、双方向の検出方式が必要です。インライン電流センサーを使用する場合、センサーの帯域幅は、ローサイドおよびハイサイド電流センサーの場合のように PWM 周波数を超える必要はありません。インライン電流センサーは、モーター電流の帯域幅に合わせて調整された帯域幅を持つことができ、これは PWM 周波数よりもはるかに低くなります。インライン磁気電流センサーは、ハイサイド磁気電流センサーと同じ電圧に耐える必要があります。部品の動作電圧定格は、モーターの通常および異常な動作中のいかなる供給変動に対しても十分なマージンを提供するように選択する必要があります。繰り返しになりますが、多くのシステムでは絶縁の要件があり、それも選択するデバイスで考慮する必要があります。
以下に、インライン電流検出デバイスの選択例をいくつか示します。
| 入力パラメーター | ケース1 | ケース2 |
| 電流検出範囲 (A) | 9A | 9A |
| 検出極性 | 双方向 | 双方向 |
| PWM 周波数 (Hz) | 20kHz | 60kHz |
| 供給電圧絶対最大値 (V) | 24V バッテリー, 55VDC abs max | 120VAC |
| ターゲットデバイス | ACS711 | ACS724/25 LC |
| 正当化 | 100 Vの絶縁電圧は55 V abs maxをカバー、双方向、10 Aの電流範囲をサポート、帯域幅は100 kHzで10 kHzより十分高い | 2500 Vpの基本絶縁電圧は120 V ACをカバー、双方向オプション、20 Aの電流範囲をサポート、帯域幅は120 kHzで10 kHzより十分高い |
| 代替デバイス | ACS71240 (QFN) | ACS71240 (SOIC) |
| 正当化 | 100V の絶縁電圧 (QFN) は55V abs maxをカバー、双方向、10A の電流範囲をサポート、帯域幅は 120kHz で 10kHz より十分高い | 2400V の絶縁電圧 (SOIC) は 120VAC をカバー、双方向、10A の電流範囲をサポート、帯域幅は 120kHz で 10kHz より十分高い |
ローサイド、ハイサイド、およびインライン電流検出における磁気電流検出
磁気電流センサーを使用したケースバイケースの例をカバーした後、今度はそれらを並べて比較することが可能です。
| タイプ | ローサイド | ハイサイド | インライン | ||
| 画像 |  |
 |
 |
||
| GNDへのショートを検出 | ✔ | ✔ | ✔ | ||
| 電源へのショートを検出 | ✘ | ✘ | ✔ | ||
| PWMとの非同期 | ✘ | ✘ | ✔ | ||
| 電圧定格 | 低 (< 20V) | 高、電源に依存 | 高、電源に依存 | ||
| 必要な帯域幅 | PWM より高い | PWM より高い | モーターより高い | ||
| 極性 | 単方向または双方向 | 単方向または双方向 | 双方向のみ | ||
| 可能な構成 | 1/2-H あたり 1つ | 合計 1つ | 1/2-H あたり 1つ | 合計1つ | 1/2-H ブリッジあたり 1つ |
| LSブレーキを測定 | ✔ | ✘ | ✘ | ✔ | |
| HSブレーキを測定 | ✘ | ✔ | ✘ | ✔ | |
| コースト状態を測定 | ✔(双方向のみ) | ✔(双方向のみ) | ✔ | ||
| ドライブ状態を測定 | ✔ | ✔ | ✔ | ||
| シャントベース電流検出との磁気ソリューション比較 | より小さなソリューションサイズ、フェイルオープン、過電圧ストレスから保護 | より小さなソリューションサイズ、基本的なまたは強化された絶縁が内蔵 | より小さなソリューションサイズ、基本的なまたは強化された絶縁が内蔵、PWM 除去 | ||
| デバイス例 | 低電圧:< 100V双方向:ACS711 (SOIC/QFN)ACS71240EX (QFN)ACS730 (SOIC)ACS724/25LC (SOIC)単方向:ACS71240EX (QFN) |
低電圧:< 100V |
低電圧:< 100V ACS711 ACS71240EX 高電圧:> 100V 2.5kVp: ACS724/25LC 6kVp:ACS37002LA 4kVp:ACS724/5MA |
||
現在、ほとんどのシャント抵抗ベースの電流検出方式はローサイド電流検出アーキテクチャーを使用していますが、磁気電流センサーはインラインアーキテクチャーに直接移行する際に潜在的な利点を提供します。低電圧システム(すなわち 100V 未満)では、上記の表に記載されているデバイスが少なくとも 100V の電圧定格をサポートしているため、同じコンポーネント(すなわち ACS711)をローサイド電流センサー、ハイサイド電流センサー、またはインライン電流センサーのいずれにも使用できます。この変換により、設計者はパワーステージのどの駆動状態でも検出できる、より堅牢なモーター電流測定が可能になります。
顧客は、単一のローサイドまたはハイサイド電流検出のみが必要なブラシレス DC または他の多相モーターの場合、インラインアーキテクチャーへの移行を選択しないでしょう。インライン電流検出方式に移行すると、単一の合計電流センサーと比較して少なくとも2つの電流センサーが必要になり、システムの総部品点数が大幅に増加します。これらの場合でも、単一の低電圧磁気電流センサーを使用することは、センス抵抗を取り除くことでシステムのソリューションサイズを縮小するための価値ある設計オプションであり得ます。磁気電流センサーはまた、前述のように、検出素子が断線故障することによる連鎖的な損傷に対するセンサーの堅牢性を高めます。
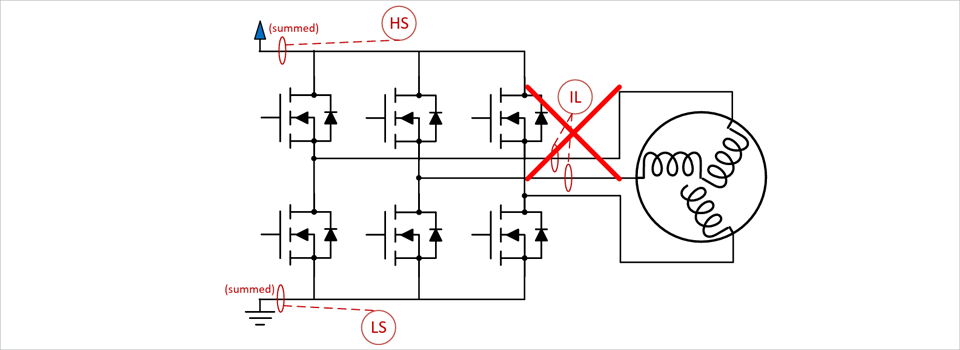
高電圧システムでは、磁気電流センサーに統合された基本または強化絶縁が、ハイサイドまたはインライン電流検出の性能要件を達成する上で非常に価値があります。典型的なセンス抵抗ベースのアプローチでは、外部のセンス抵抗、増幅段、デジタル化、絶縁バリアーを介した通信、および信号の再構築が必要です。回路の一次(高電圧)側は、入力回路に電力を供給するために何らかの供給電圧を必要とします。これを磁気電流センサーと比較することが可能です。磁気電流センサーは一次側に能動回路がなく、したがってシステムソリューションとして総部品点数が少なくなります。
| 回路タイプ | 回路図 |
| 絶縁型センスアンプ | 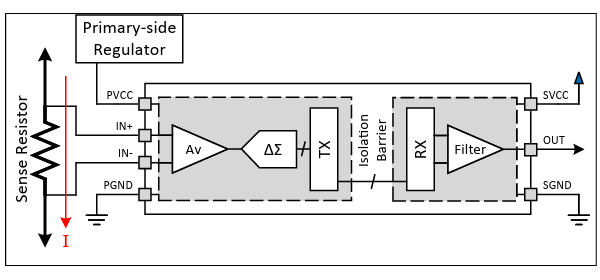 |
| 磁気電流センサー | 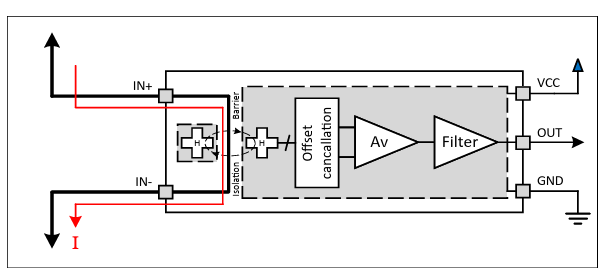 |
結論
モータードライブアプリケーションにおける電流センサーの目的と、設計者にとっての潜在的なシステムアーキテクチャの選択肢をレビューした後、モータードライブシステム用の磁気電流センサーを選択する際のいくつかのベストプラクティスをカバーすることが可能です。
- 磁気電流センサーは、現在インライン電流検出を使用しているか、またはそれに移行する際に最大の利点を提供します。出力サンプリングの簡素化、あらゆるモーター駆動状態での測定、GND への短絡状態の検出、およびセンサー帯域幅要件の低減のために、インライン電流検出の使用を検討してください。
- 磁気電流センサーの絶縁電圧定格は、システムが通常動作時および過電流などの障害発生時に見ることができる最大可能供給電圧よりも大幅に高い(すなわち、少なくとも +20%)ものを選択してください。
- 磁気電流センサーデバイスの帯域幅が、ローサイドおよびハイサイドアプリケーションでは PWM 周波数に対して十分なマージン(すなわち、2倍以上)を持ち、インラインアプリケーションではモーター電流帯域幅に対して十分なマージンを持つことを確認してください。インラインアプリケーションでは、ハイサイドおよびローサイドに比べて帯域幅が低いデバイスを使用できることがよくあります
- 検出対象の目標モーター電流範囲を最も密接にカバーするように、磁気電流センサーの電流測定範囲を選択してください。例えば、モーターが 5A RMS および 10A ピークで定格されている場合、少なくとも 10A の電流測定範囲を持つ電流センサーを選択してください。
- 最も一般的な出力極性は双方向ですが、単方向極性を使用すると、逆電流を測定する必要がない一部のローサイドおよびハイサイドアプリケーションで出力信号を効果的に 2倍にすることができます。ほとんどのマイクロコントローラーの ADC リソースは、磁気電流センサーの出力よりも大幅に高い分解能を持っているため、システム精度は、単方向センサーよりも双方向センサーを選択することによって影響を受けないことが多いです。
改訂履歴
| 番号 | 日付 | 説明 | 責任者 |
| — | 2023年3月29日 | 初版 | Tyler Hendrigan |
Copyright 2023, Allegro MicroSystems
この文書に含まれる情報は、この文書の主題に関してお客様に対する Allegro からのいかなる表明、保証、確約、または誘引をも構成するものではありません。提供される情報は、この情報に基づくプロセスが信頼できること、または Allegro が考えられるすべての故障モードを調査したことを保証するものではありません。最終製品が信頼でき、すべての設計要件を満たしていることを確認するために、十分な認定試験を実施することは、お客様の責任です。
この文書のコピーは、管理されていない文書と見なされます。
お問い合わせ
本記事に関して、ご質問などありましたら以下よりお問い合わせください。
Allegro MicroSystems メーカー情報 Top ページへ
Allegro MicroSystems メーカー情報 Top ページへ戻りたい方は、以下をクリックください。