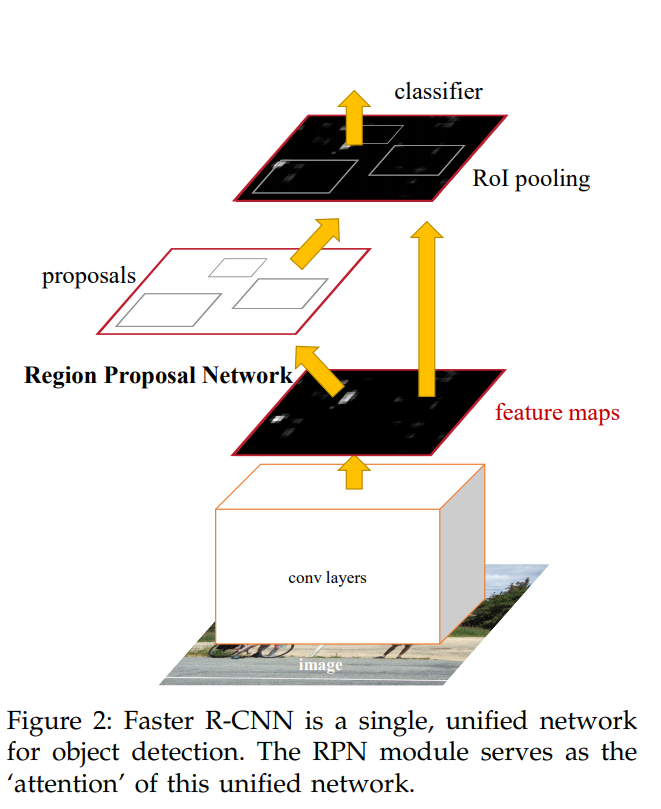
arXiv:1506.01497v3 出典: “ Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks ” キャプション:“ Figure 2: Faster R-CNN is a single, unified network for object detection. The RPN module serves as the ‘attention’ of this unified network.” https://arxiv.org/pdf/1506.01497.pdf
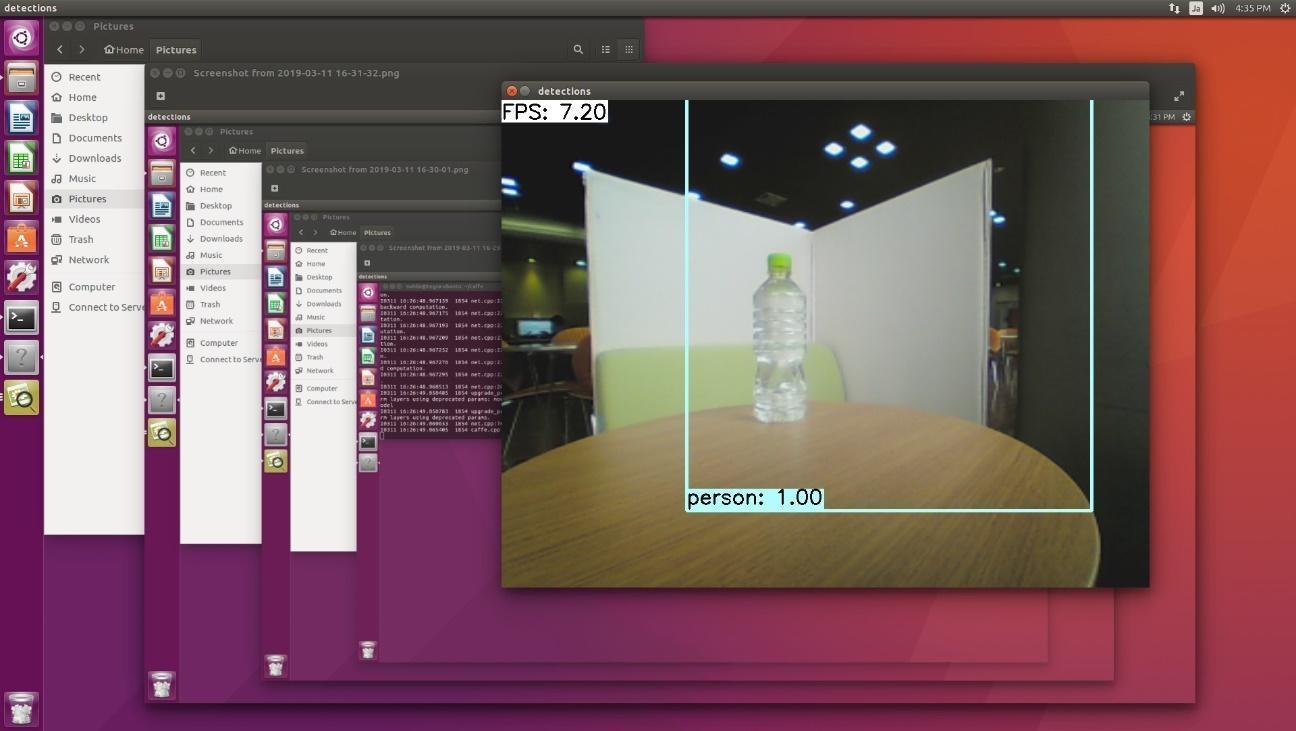
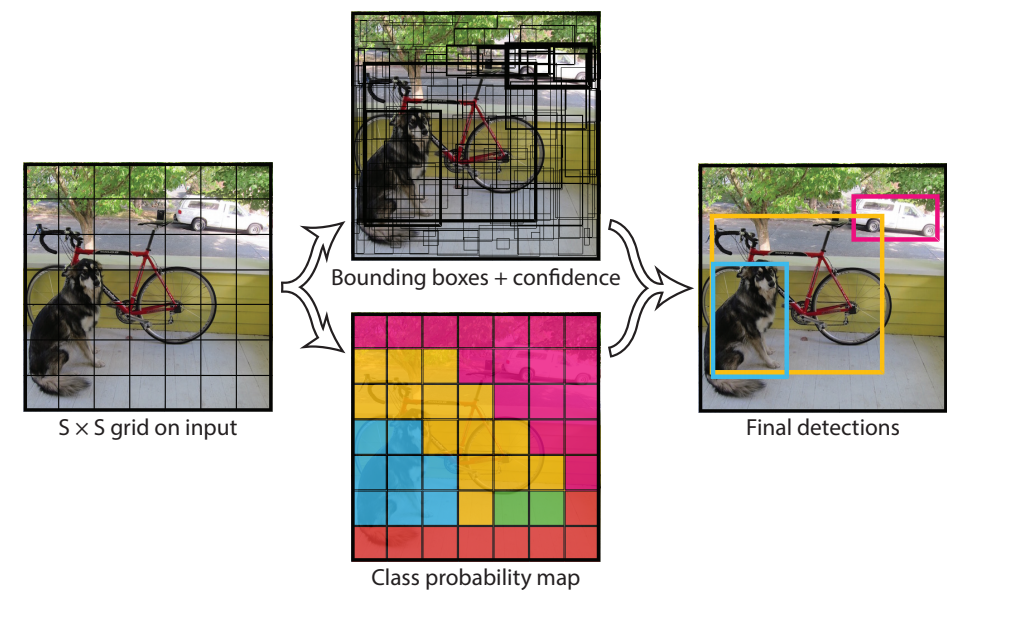
「検出」の後に「識別」を行うような直列の処理構成なのですが、これによって処理速度が遅いという問題がありました。 そこで、YOLO(You Only Look Once)では、画像認識を回帰問題に落とし込み、検出と識別を同時に行うことを実現しました。 それによって、処理が速くなり、画像全体も見渡すことができるので、背景を誤検知することはなくなりました。 現在でも、YOLOは改良が続けられており、最新のものではversion3までソースコードがアップロードされています。 ただし、小さい物体の検出が得意ではないため、精度は他と比較すると高くはありません。
物体検出を回帰問題で扱うYOLO
arXiv:1506.02640v5 出典: “ You Only Look Once:Unified, Real-Time Object Detection ” キャプション:“ Figure 2: The Model. ” https://arxiv.org/pdf/1506.02640.pdf
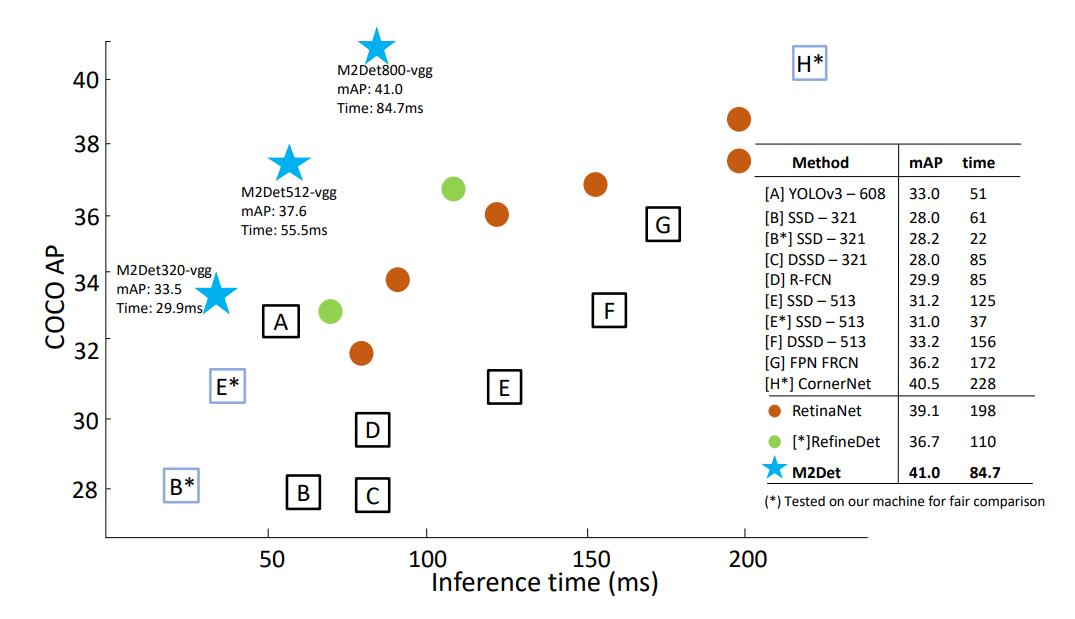
出典: “ M2Det: A Single-Shot Object Detector based on Multi-Level Feature Pyramid Network ” キャプション:“ Figure 2: An overview of the proposed M2Det(320 × 320). ” https://arxiv.org/pdf/1811.04533.pdf
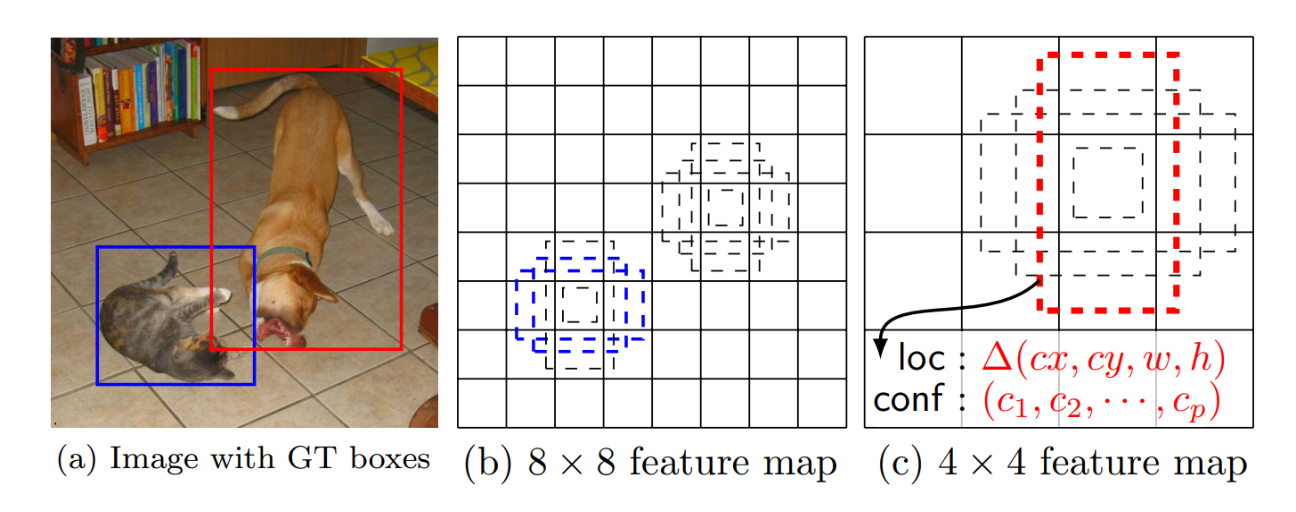
Wei Liu, Dragomir Anguelov, Dumitru Erhan, Christian Szegedy, Scott Reed, Cheng-Yang Fu, Alexander C. Berg. “SSD: Single Shot MultiBox Detector”. arXiv:1512.02325v5, https://arxiv.org/pdf/1512.02325.pdf
Shaoqing Ren, Kaiming He, Ross Girshick, and Jian Sun. “Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks”. arXiv:1506.01497v3, https://arxiv.org/pdf/1506.01497.pdf
Joseph Redmon, Santosh Divvala, Ross Girshick, Ali Farhadi. “You Only Look Once: Unified, Real-Time Object Detection”. arXiv:1506.02640v5, https://arxiv.org/pdf/1506.02640.pdf
Qijie Zhao. “M2Det: A Single-Shot Object Detector based on Multi-Level Feature Pyramid Network” Web, Retrieved from https://github.com/qijiezhao/M2Det
Qijie Zhao, Tao Sheng, Yongtao Wang, Zhi Tang, Ying Chen, Ling Cai and Haibin Ling. “M2Det: A Single-Shot Object Detector based on Multi-Level Feature Pyramid Network”. arXiv:1811.04533v3, https://arxiv.org/pdf/1811.04533.pdf
マクニカのARIH(AI Research & Innovation Hub)では、最先端のAI研究・調査・実装による評価をした上で最もふさわしいAI技術を組み合わせた知見を提供し、企業課題に対する最適解に導く活動をしています。 詳細は下記よりご覧ください。
 最新情報
最新情報 導入事例
導入事例 ブログ
ブログ 資料一覧
資料一覧