- Smart City/Mobility Business HOME
- Search by use case
-
Search by product/service

- event·
seminar -
Case studies and columns
- Inquiry
Overview
Regarding "SLAM" technology, which simultaneously estimates self-location and creates an environment map based on data obtained from sensors, we provide customer environments, such as consulting on optimal sensors according to use cases, provision of licenses, and technical support for implementation. Total support for the utilization of SLAM in
About SLAM
SLAM is an abbreviation for Simultaneous Localization and Mapping, and is a technology that performs self-localization and environmental map creation at the same time. In an unknown environment, based on the input from sensors such as cameras and LiDAR, you can grasp where you are (self-localization) and what is happening around you (environment map creation). As a result, it is expected to be applied to various applications such as autonomous driving, AGV, and robots.
Advantages of SLAM
Self-localization and environment mapping are interdependent. Self-localization requires a map, and environmental mapping requires location. Although there are techniques for self-localization and environment mapping independently, SLAM can do both at the same time.
For example, there are GNSS (positioning satellite system) and dead reckoning (IMU, odometry, etc.) as methods of grasping the current location, but neither of them can create an environment map at the same time. Furthermore, GNSS has problems such as radio waves not reaching indoors and dead reckoning errors accumulating during long-distance driving. Environmental mapping can be done at the same time. By combining GNSS and dead reckoning with SLAM, it is also possible to perform more accurate self-position estimation.
SLAM types
SLAM is executed with information from various sensors as input and can be classified into “LiDAR SLAM”, “Visual SLAM” and “Depth SLAM” depending on the sensor used. Each has its own characteristics, so it is important to select which sensor to use according to the required specifications and budget.

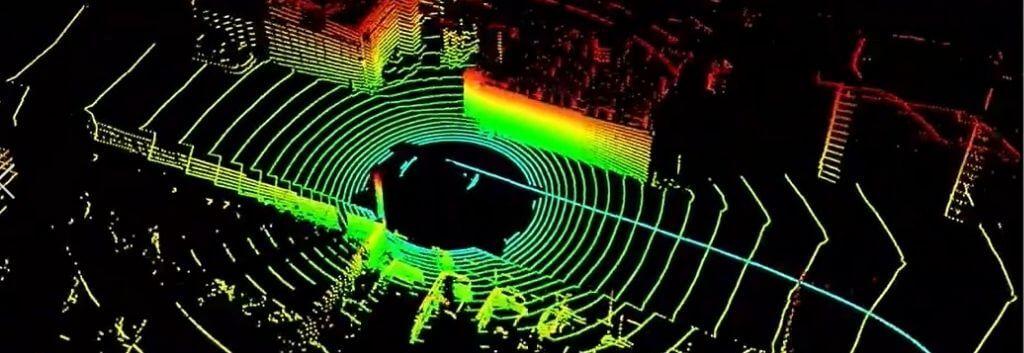
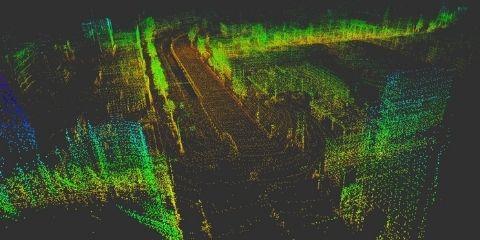
LiDAR SLAM
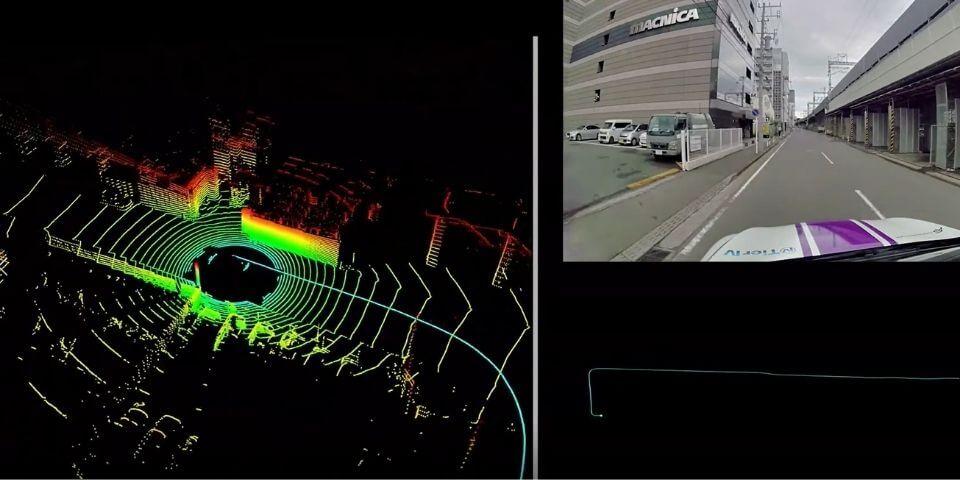
LiDAR SLAM executes SLAM from point cloud data acquired by a laser scanner (LiDAR). LiDAR can measure the distance to an object with extremely high accuracy, so it is often used when you want to generate a high-precision map. In addition, it is suitable for executing SLAM on a high-speed moving object such as a car because it has better distance measurement accuracy than a camera.
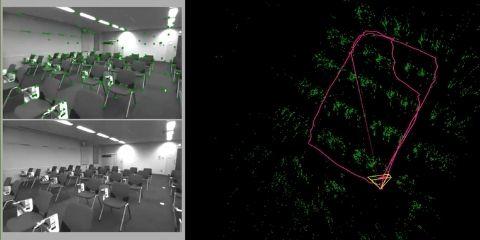
Visual SLAM
Visual SLAM executes SLAM from images captured by the camera. SLAM can be easily applied by using a camera that can be obtained relatively cheaply. It can also be used for applications other than SLAM, such as recognizing objects from images captured by a camera.
Depth SLAM
Depth SLAM executes SLAM from depth images acquired by depth cameras, ToF sensors, etc. SLAM can be applied even in environments with few feature points or in dark environments, which Visual SLAM is not good at.
Use Case
Many people may think of "robot vacuum cleaners" when it comes to practical examples of SLAM, but there are also "autonomous driving cars", "drones", "AGVs (automated guided vehicles)", "VR/AR/MR", etc. are used for various purposes.
autonomous driving car
robot vacuum cleaner
drone
AGV (automated guided vehicle)
VR/AR/MR
SLAM provided by Macnica
Macnica provides high-performance SLAM licenses. It can be used commercially as a highly functional and reliable SLAM compared to open source SLAM. We also provide regular quality checks and updates, as well as technical support in case of trouble.
|
SLAM provided by Macnica |
Open source SLAM |
|
|
Usage |
commercial |
the study |
|
OS compatible |
〇 |
△ |
|
Processor compatible |
〇 |
× |
|
sensor compatible |
〇 |
△ |
|
Map management |
〇 |
△ |
|
license |
〇 |
△ |
|
quality |
〇 |
× |
|
technical support |
can be |
none |
Business process
We will support from definition of SLAM requirements to implementation in the actual environment according to the customer's request.
Requirement definition
After hearing the environmental conditions and required specifications, we identify the necessary functions and define the requirements.
Sensor host selection
Considering your budget and accuracy, we will select the best sensor and host for your application.
Demonstration experiment
Evaluate SLAM in the actual environment, identify issues, and support improvement (on-site support)
Implementation
We provide technical support for implementation support and operation of SLAM in the final actual environment.
demonstration
We are demonstrating SLAM with various sensors such as LiDAR, stereo cameras, and ToF sensors. In addition to demonstrations with various cameras that we visited at the office, it is also possible to perform LiDAR SLAM demonstrations with the Company own cars, so please feel free to contact us.
Document download
Please download the materials related to the SLAM introduction support service from here. Detailed information such as service contents and processes is provided.
Inquiry
If you have any questions or concerns about the SLAM utilization service, please feel free to contact us from here.