- Smart City/Mobility Business HOME
- Search by use case
-
Search by product/service

- event·
seminar -
Case studies and columns
- Inquiry
About Kudan
Kudan has developed its own SLAM, a technology that simultaneously performs self-localization and environmental mapping, with the vision of becoming the eye of all machines.
This technology has huge potential for applications such as autonomous driving, robotics, AR/VR, and smart cities, and will bring about changes in various aspects of our lives.
Kudan, which was established in 2014, has been contributing to the realization of autonomous driving society by focusing on many years of research and commercial implementation.
Features of KudanSLAM Service
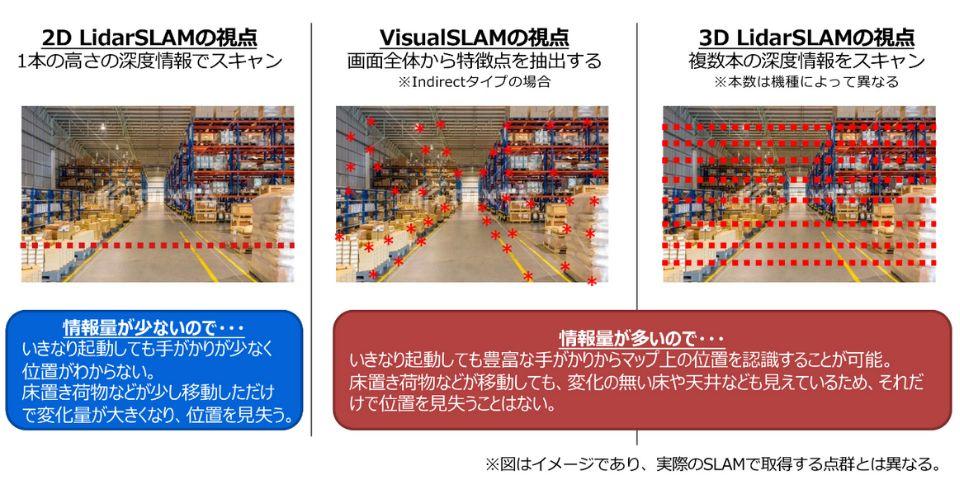
Currently, autonomous driving robots generally recognize the world in two dimensions using 2D lidar. However, the amount of information was limited, and the area in which it could be operated was limited.
KudanSLAM provides SLAM that recognizes the world in three dimensions using cameras and 3D lidar. This enables seamless movement indoors and outdoors, and enables operation in environments with large environmental changes, enabling a wide range of applications.
There is a separate column for general SLAM technology explanations, so please refer to that as well.
Product lineup
We can provide commercial-grade self-localization and environment map creation technology. As an open source SLAM issue, there are cases where the accuracy is insufficient and there is a problem that it cannot be used commercially. Through years of research and implementation, KudanSLAM can provide two types of product technology: camera SLAM [KdVisual] and 3D LiDAR SLAM [KdLidar].
KdVisual
We can provide products compatible with each SLAM format based on the distance from the point extracted from the camera image. It is compatible with various cameras, stereo cameras, depth sensors, and has low processing hurdles for product implementation. Compared to other SLAM algorithms, it achieves a significant reduction in processing time, high accuracy, and high robustness, even in situations where the environment changes moment by moment.
KdLidar
It is a unique LiDARSLAM that overcomes the problems of accuracy and data processing volume that have been problems with self-localization and environmental map creation and operation using LiDAR so far. In addition to the commonly used rotating type LiDAR, we also support solid-state types, which can be applied to a wide range of customer environments. In addition, since it is possible to obtain a highly accurate 3D point cloud map with simple hardware, it is also used for digital twin solutions.
Highest performance and freedom of sensor configuration
KudanSLAM can be integrated with a wide range of sensor data, such as ToF, IMU, GNSS, wheel odometry, in addition to cameras and LiDAR. For example, integration with an IMU sensor enables self-position estimation without being confused by moving objects, and combined use with GNSS eliminates cumulative errors in wide-area outdoors.
Kudan's advanced sensor fusion technology ensures high accuracy and environmental robustness in various environments, and supports a wide range of use cases from construction machinery to indoor robots.
Prepare an easy-to-use evaluation package for each site
SLAM implementation in the customer environment requires fine adjustments such as calibration and sensor placement. Kudan is preparing a simple evaluation package for purchase so that customers can easily feel the appeal of KudanSLAM.

Initial evaluation package

Mapping Dev Kit
Use Case
It can be used in applications that have been attracting attention in recent years, such as autonomous driving of automobiles/robots/drones and digital twin mapping.
autonomous driving car
robot vacuum cleaner
drone
AGV (automated guided vehicle)
VR/AR/MR
Inquiry
If you have any questions or concerns about Kudan, please feel free to contact us from here.