What is NVIDIA Isaac™
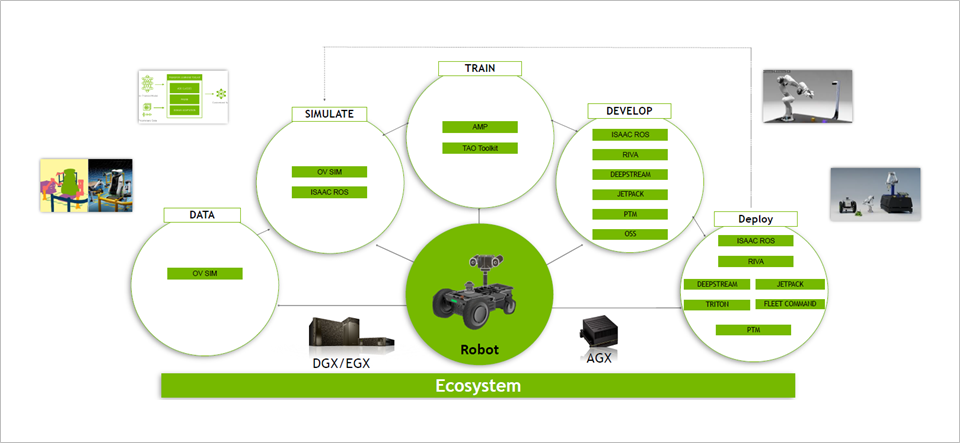
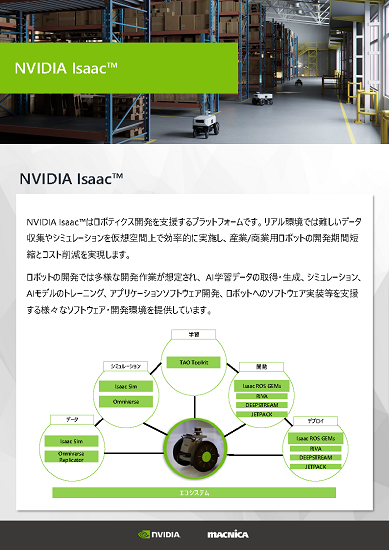
NVIDIA Isaac™ is a robotics development support platform provided by NVIDIA.
In the development of robots, various development tasks are assumed, such as acquisition and generation of AI learning data, simulation, AI model training, application software development, and software implementation on robots. To support this series of development, NVIDIA Isaac Sim based on Omniverse for acquisition, generation and simulation of AI learning data, NVIDIA TAO Toolkit for AI model training and model generation, NVIDIA Isaac ROS for development, We provide a wide variety of software and development environments such as NVIDIA Triton™ for software implementation on robots.
This page introduces Isaac Sim and Isaac ROS.
Source: NVIDIA
Features of Isaac Sim
Isaac Sim is an application tool for robot simulation based on Omniverse. Assets such as robot models can be imported into a photorealistic virtual environment (digital twin) built with Omniverse, and operation simulations and navigation simulations can be performed. These simulators contribute to reducing the costs and man-hours required to introduce robots.

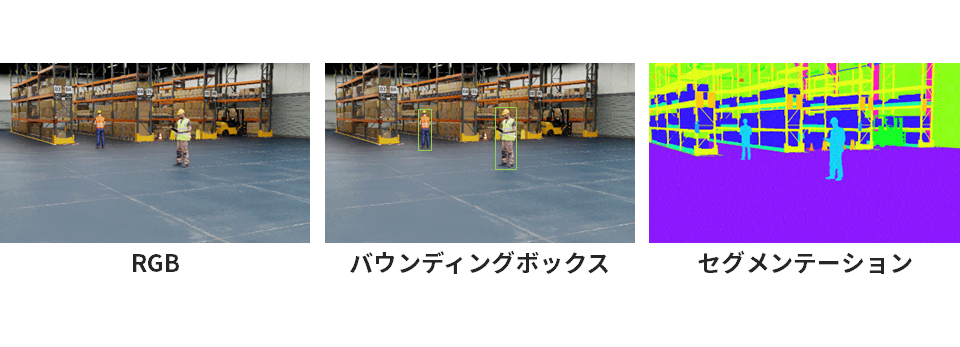
Isaac Replicator
Training an AI model requires a huge amount and variety of datasets. Collecting a sufficient dataset can be costly, time consuming, difficult and dangerous. By using Isaac Replicator, it is possible to automatically generate images used for AI learning in various pre-defined conditional environments.
The domain randomization function allows you to set random parameter conditions for object lists, placement positions, angles, lighting conditions, camera conditions, textures, etc. The generated dataset output image supports bounding Box, depth, segmentation, etc., and it is possible to automatically generate datasets of various scenes.
Source: NVIDIA
People Simulation
The People Simulation function makes it possible to make people walk in virtual space.
It can be used to generate AI dataset images of scenes containing people, and to test algorithms that allow robots to recognize and avoid people in environments where people are walking.

Source: NVIDIA
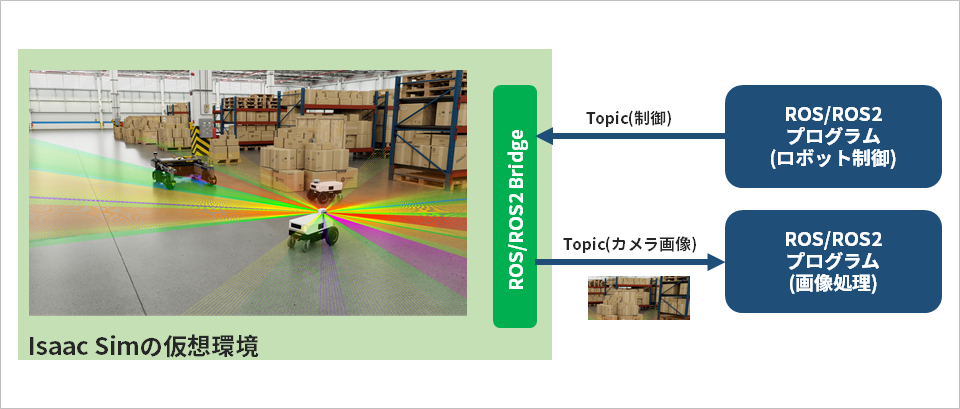
ROS/ROS2 Bridge
The ROS/ROS2 Bridge feature allows you to communicate with the robot on Isaac Sim using Topics (messages) executed in ROS or ROS2 programs.
Execution example
・Running control of the robot in the virtual environment with the control topic sent from the ROS/ROS2 program
・Execution of ROS/ROS2 programs using topic information from sensors such as cameras and radars installed in robots in virtual environments
Features of Isaac ROS
Isaac ROS is a hardware acceleration package that accelerates application development for autonomous mobile robots on NVIDIA GPUs and NVIDIA® Jetson™ platforms. Since it is ROS2 compatible, it enables ROS2 application development in combination with other ROS2 packages.
It also includes a collection of algorithms called Isaac ROS GEMs that are useful for developing autonomous mobile robots, and you can add functions such as object detection, self-localization, and navigation to check the operation.
The operating environment supports Linux-PC (x86_64) with NVIDIA GPU and Jetson. You can also check the operation of the ROS2 application with the added .
Example: Add AI processing (human detection) to ROS2 program
・Executed on the built-in GPU (Jetson) installed in the actual robot
・Can control robots on Isaac Sim running on Linux-PC
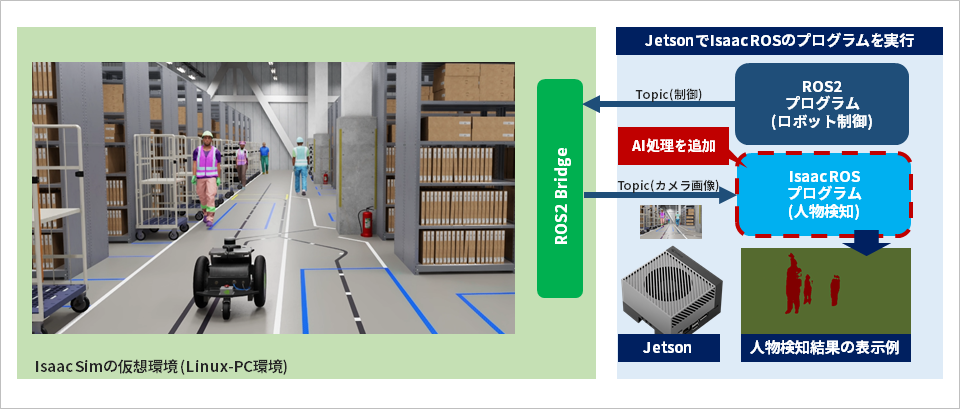
Example of robot driving simulation in virtual space (digital twin) of Macnica warehouse
Isaac ROS GEMs
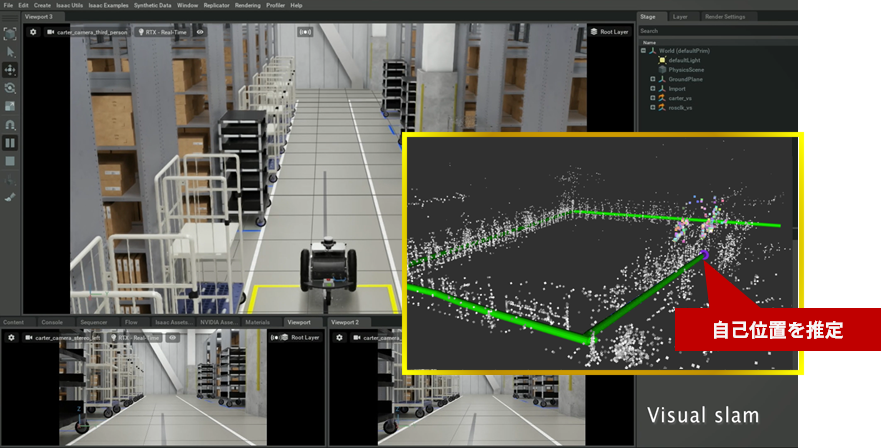
Visual SLAM: Estimating a robot's self-position from stereo camera images
On the execution screen of Visual SLAM, the distance to the surrounding objects is calculated from the image of the stereo camera mounted on the robot, and the self-position of the robot is estimated.
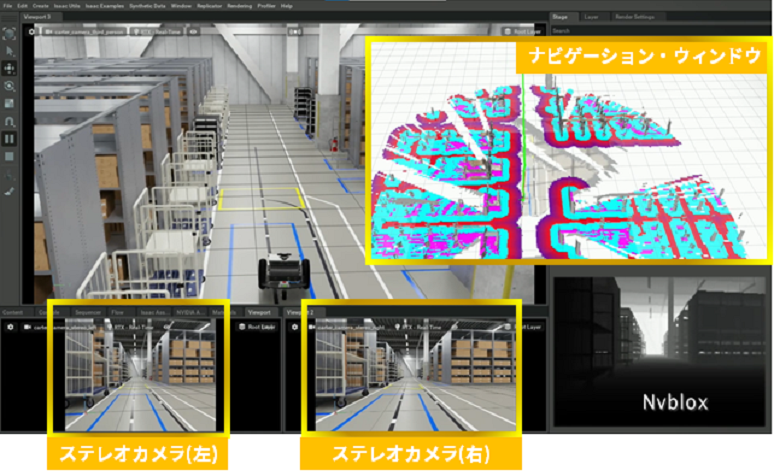
NVBLOX: Automatically run the robot to the specified point
The environment around the robot is constructed as a 3D image from real-time sensor information such as stereo cameras. The path planner generates a collision-free path, and the robot can automatically travel to the goal point specified in the navigation window.
Click here for detailed information
For more information about NVIDIA Isaac, downloadable materials are available.
Please use all means.
Contact Us
Macnica provides NVIDIA software solutions centered on Isaac, and has a rich track record of supporting robotics-related companies. If you are considering introducing AI, please contact us.
AI TRY NOW PROGRAM
This is a support program that allows you to test the latest AI solutions on the NVIDIA development environment before introducing them into your company.
You can deepen your understanding of software products such as NVIDIA AI Enterprise and NVIDIA Omniverse and investigate the feasibility of your implementation objectives in advance.
Related product page