- Semiconductor BusinessHOME
- Products and Services of Macnica,Inc.
-
technical information

-
Events and Seminars
- Handling Manufacturer
- Support
- Inquiry
- Click here to purchase products
- Semiconductor business e-mail magazine registration
![]()
![]() Narrow down by specifying conditions
Narrow down by specifying conditions
現在2159件がヒットしています。check

It's been a while, I'm Ozu, a 2025 new graduate FAE!
Last time, we made many mistakes in designing the power supply that powers the machine, but we finally managed to ensure a stable voltage.
This time, we will introduce the sensors and motors used to assemble the car body!
Machine Specifications
Last time, I didn't go into detail about the machine, so I'll give a brief explanation here. The sensors and motors used this time are as follows.
Microcomputer board
・Arduino UNO R4
sensor
- Infrared distance measuring sensors: Installed on the front left and right sides of the vehicle to measure the distance to walls and determine whether or not there are walls.
・3-axis gyro & 3-axis acceleration sensor → Supports accurate 90-degree and 180-degree rotation
Drive related
・ DC geared motor
・Motor driver
・Encoder → Obtains the number of rotations of the DC motor and calculates the traveled distance
Others
・LED (light-emitting diode) → Visualization of the distance sensor status
・Switches → Machine start switch, mode switching
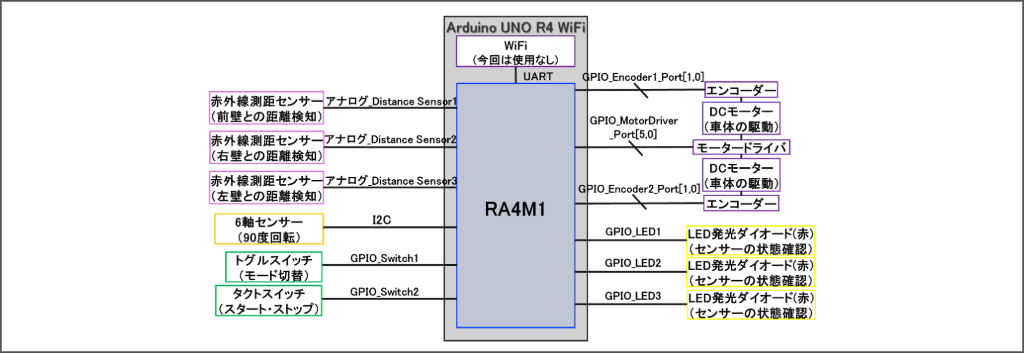
In this workshop, we will use the Arduino UNO R4 as the microcontroller for control.
The connections are made using various interfaces such as GPIO, analog, and I2C, as shown in the hardware block diagram 1 below.
A universal plate is used for the chassis base, and the machine concept, combining the above parts with tires, is as shown in Figure 2.
Sensors are installed on the bottom shelf, and the 6-axis sensor is hung at the center of rotation when turning. The Arduino is installed on the top shelf to see the frequently touched buttons, switches, and LED panel. At the time, I was happy that I was able to arrange them well in a space-saving manner.
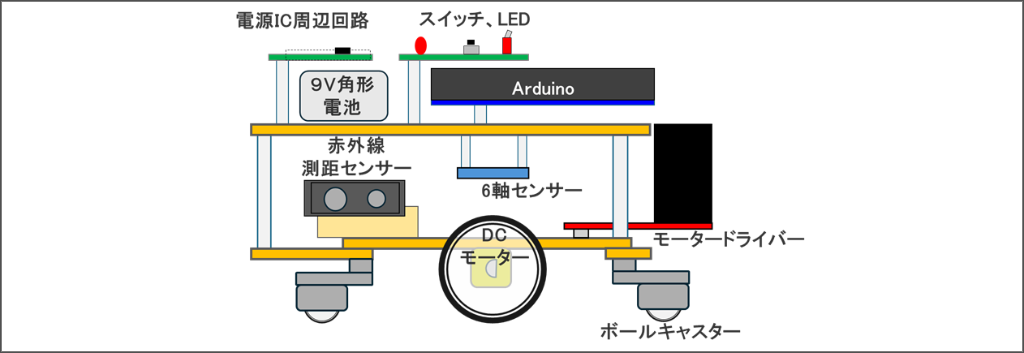
However, there is one factor that this diagram does not take into account...
Assembling the machine
Based on the previous configuration diagram, adjust the size of the universal board, screw in the sensor, adjust the height with spacers, and finally, while looking at the connection diagram, wire the appropriate pins together to complete the machine.
And here is the finished machine.
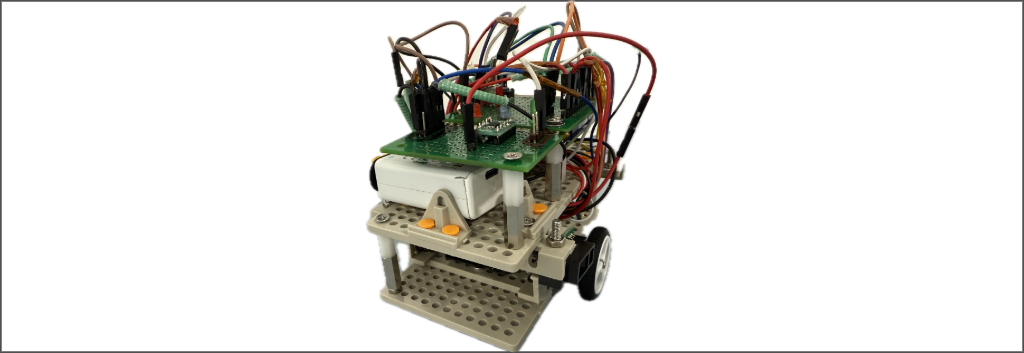
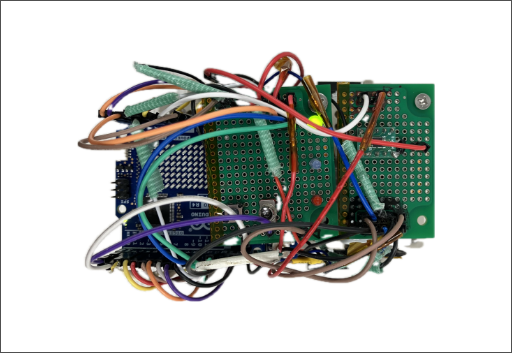
…… yeah?
Is the sensor positioned correctly? I can't see the sensor in front of me.
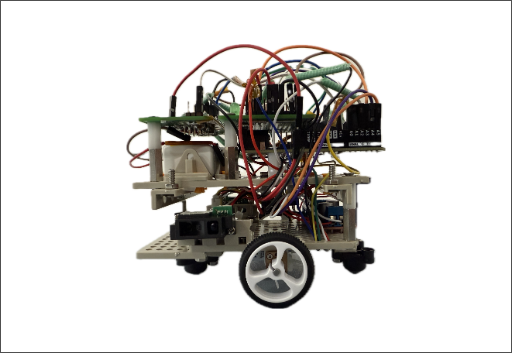
That's right. The wiring is a mess. There are a lot of jumper wires running above, below, left and right, and all over the place.
This was because the Arduino, GND, and 5V were concentrated on the upper level and the sensors on the lower level, necessitating long wiring to connect the top and bottom.
As a result, the following problems occurred frequently:
① It comes off easily
The large number of crossed jumper wires inevitably puts a strain on something, and they can easily come loose just by lifting them up. What's more, it's often difficult to notice when they've come loose, and by the time you do, the car won't run.
②Debugging is difficult
Just changing the position of a sensor requires removing more than 30 jumper wires, and reconnecting them can take more than 30 minutes.
3) The jumper wire is severely deteriorated.
Every time the machine is moved, pressure is placed on the jumper wire, which can cause the coating to break and the wire to break.
④The switch cannot be pressed
The jumper wires are attached so that they wrap around the universal board and plate, so great care must be taken when starting and stopping.
⑤It looks bad
The shaggy machine, with its circuit boards and wiring exposed, looks bad from every angle.
Why did it turn out like this?
My classmates in the same workshop were making creative layout changes, such as placing pin headers on the board and inserting Arduinos to avoid aerial wiring.
I prioritized "getting it running first," which reduced the time I spent considering the layout and rushed through the wiring, which ended up taking a longer route.
Perhaps I should have been more careful with the layout, or perhaps I made a mistake in choosing the board, but either way, I didn't plan ahead enough.
Summary
What did you think?
The messy wiring makes a great impact, but its practicality is...
The result of rushing ahead is suffering later.
All that's left is to get it running! The appearance of the machine is met with criticism from those around.
To make a comeback, you need an excellent driving system!
In the next and final episode, we'll see what happens to the Moja Moja Machine! See you in the "Running Edition"!!
Move, Run, My Machine Article List
・Car body production
・ Driving