
![]()
![]() Narrow down by specifying conditions
Narrow down by specifying conditions
現在1888件がヒットしています。check

XP2210: UDR (Untethered Dead Reckoning) compatible module
Semtech's GNSS module: XP2210 supports UDR. This page introduces the UDR function and describes the actual measurement results.
What is UDR (Untethered Dead Reckoning)?
There is a technology called Dead Reckoning for positioning information using GPS satellites. This is a technology that estimates the current location using acceleration sensors and gyro sensors in places where GPS satellites cannot be seen, such as underground or in tunnels. It is widely used for positioning in car navigation systems.
UDR stands for Untethred Dead Reckoning, and is a technology that enables highly accurate autonomous navigation without external sensors. This is achieved by using an internal inertial navigation system (INS).
GPS and INS
UDR is realized using GPS and INS unit built into XP2210.
As is well known, GPS is a technology that obtains and provides location and information from GPS satellites under the open sky. Since the signal characteristics are weak against reflections and satellites in the open sky are used, reception sensitivity tends to be poor indoors such as in buildings.
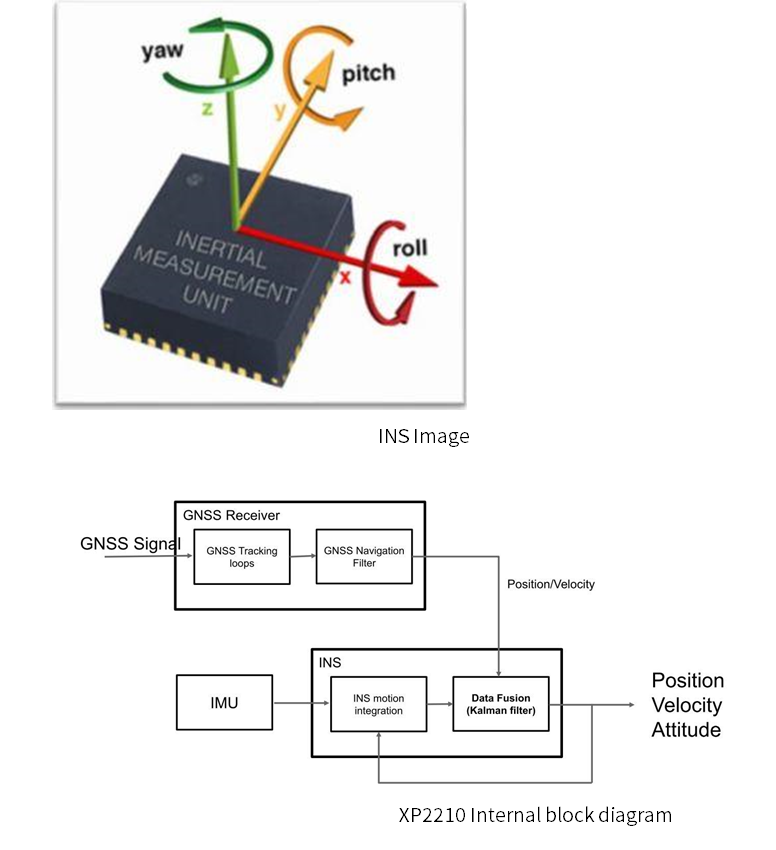
On the other hand, the INS uses an internal inertial measurement unit (IMS) to calculate acceleration and angular velocity. It calculates position, speed, and attitude in three directions using the 3-axis acceleration sensor, gyro sensor, and magnetic sensor shown in the figure on the right. Since it does not use satellites, it can perform calculations independent of the environment.
The XP2210 realizes UDR technology by combining GPS and INS.
The Kalman filter is used to provide accurate location information by UDR. This is an estimation method that uses two parameters, Odometry and Observation. Odometry is the current state estimated from past estimates and current input values, and Observation refers to the observed value by the sensor. By setting Odometry = GPS and Observation = INS, the current location information can be estimated more accurately by the Kalman filter.
Measurement environment
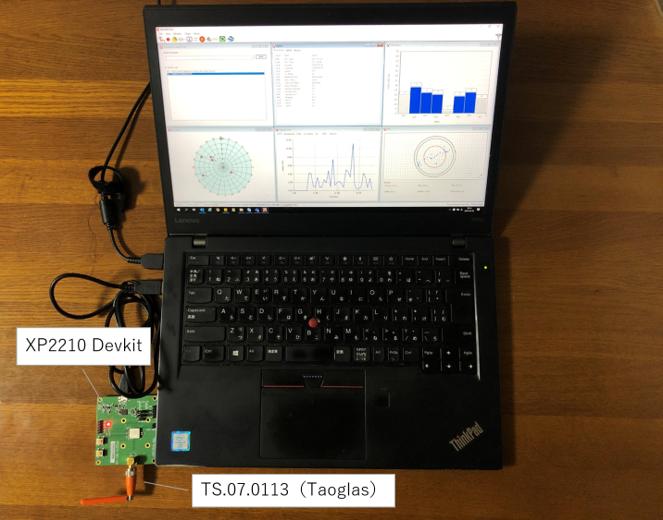
Measurement was performed in the following environment.
*XP2210 Development Kit*
*GNSS Antenna: TS.07.0113 (manufactured byTaoglas)*
*PC
*Operating environment: Inside the car
【procedure】
① Set up the environment on the left
②Launch ofGNSS toolprovided by Sierra
https://source.sierrawireless.com/resources/airprime/software/gnss_tool/#sthash.6ew5U897.dpbs
③Calibrationexecution
④ Start GNSSpositioning
*Introduction is possible from our company.
UDR measurement result
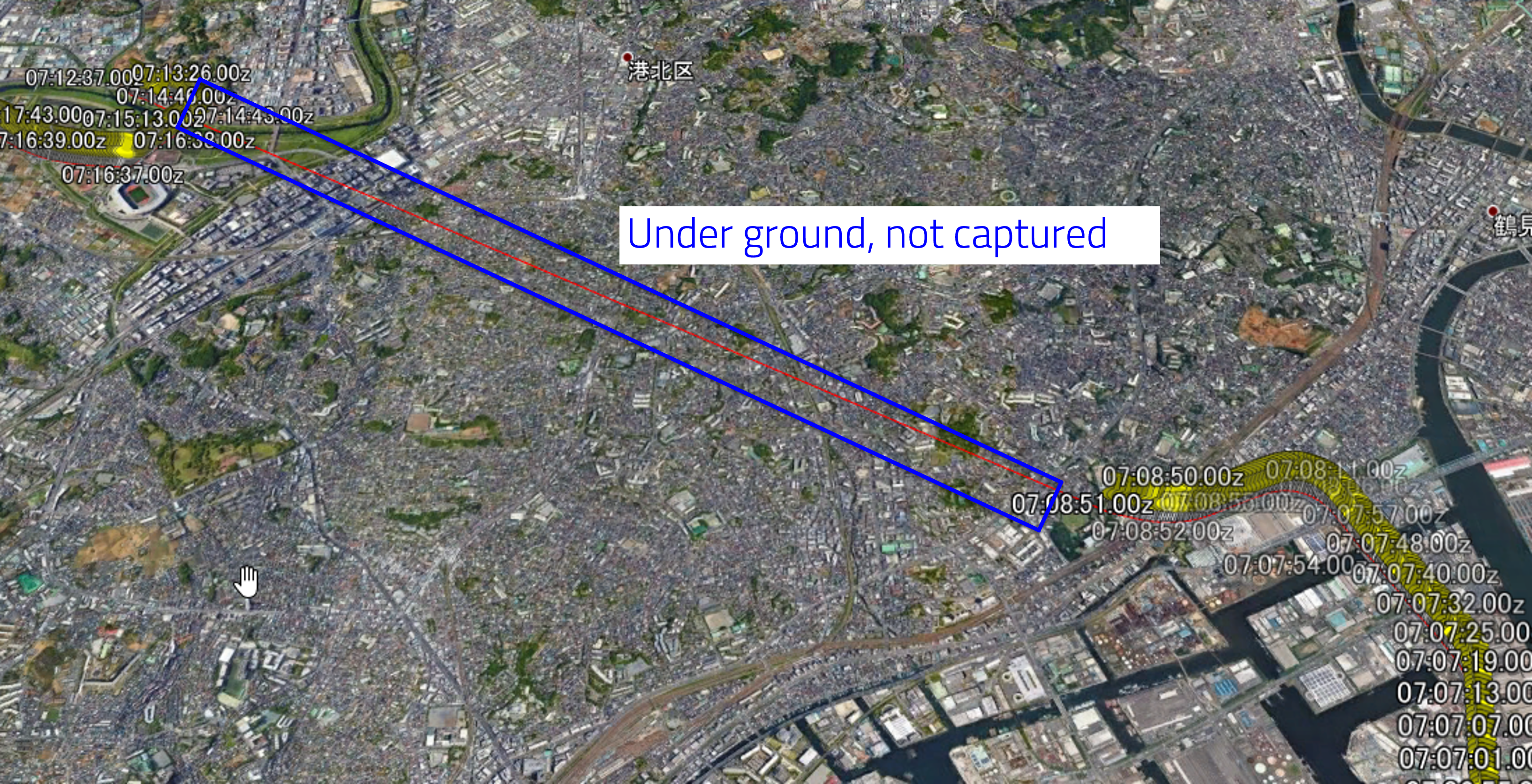
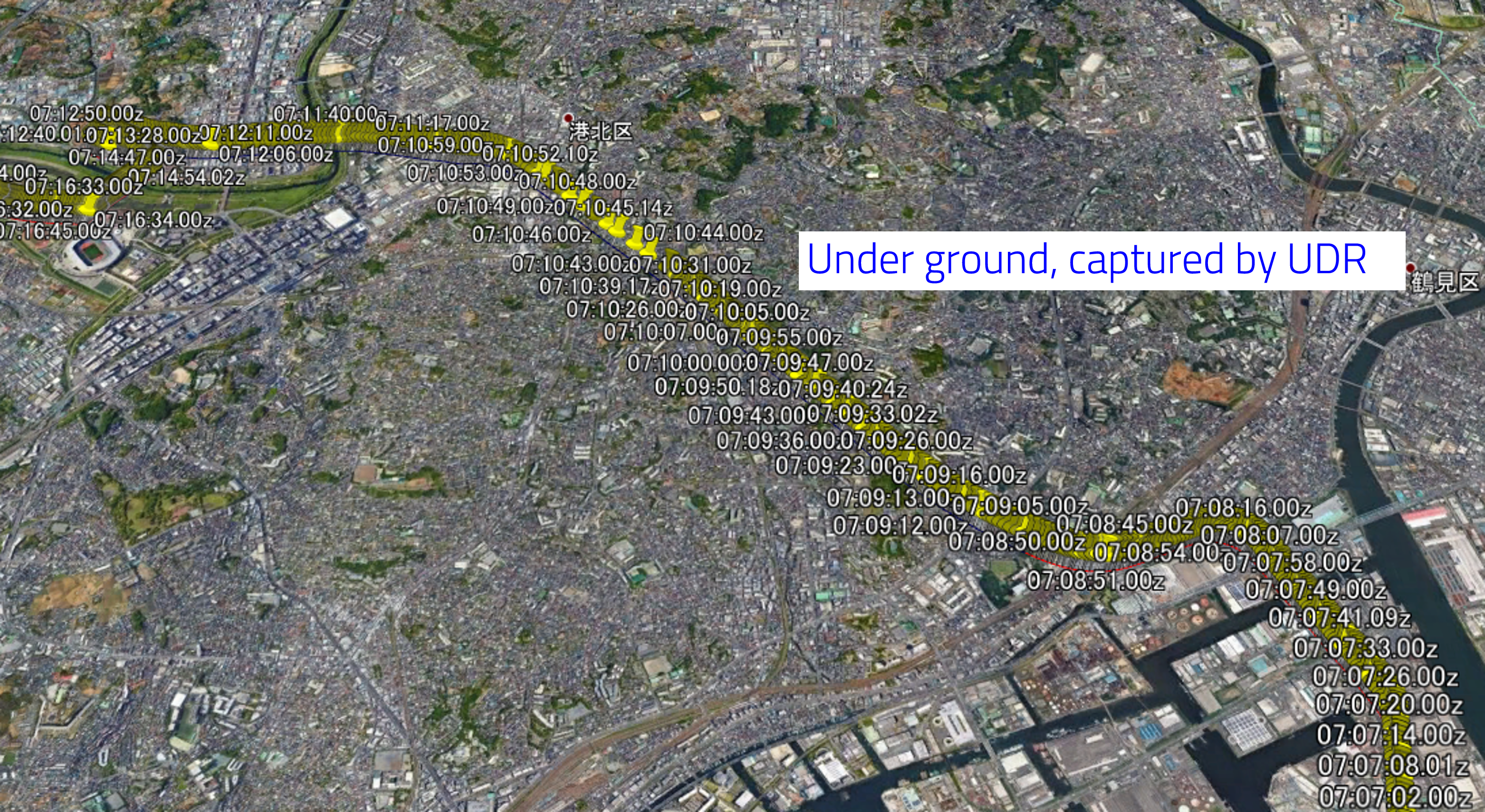
The above are the results with and without the UDR function. The left image is a comparison without the UDR function, and the right image is a comparison with the UDR function. This time, the vehicle was equipped with an XP2210 and positioning was performed on a route that passed through the tunnel enclosed in a blue frame.
As a result, when UDR was disabled, NMEA data was lost, meaning positioning was not possible, but by enabling UDR, an estimated position was calculated using INS, achieving intermittent positioning.
Summary
On this page, we introduced an overview of the UDR function of the XP2210 and the actual measurement results. As a result, we have achieved high-precision positioning using UDR without being affected by the external environment or moving speed in in-vehicle measurements. By using the XP2210, further application to M2M devices for mobile terminals can be expected.
Inquiry / Quotation
If you have any questions about this product or would like a quote, please contact us using the form below.
Semtech Manufacturer Information Top Page
If you would like to return to the Semtech manufacturer information top page, please click below.