- Semiconductor BusinessHOME
- Products and Services of Macnica,Inc.
-
technical information

-
Events and Seminars
- Handling Manufacturer
- Support
- Inquiry
- Click here to purchase products
- Semiconductor business e-mail magazine registration
![]()
![]() Narrow down by specifying conditions
Narrow down by specifying conditions
現在2191件がヒットしています。check
2025 International Robot Exhibition Exhibition Report
Macnica exhibited at the 2025 International Robot Exhibition as an NVIDIA distributor.
This page is intended for those who would like to hear a more detailed explanation of the contents of this exhibition or would like to review it again.

Theme of this exhibition
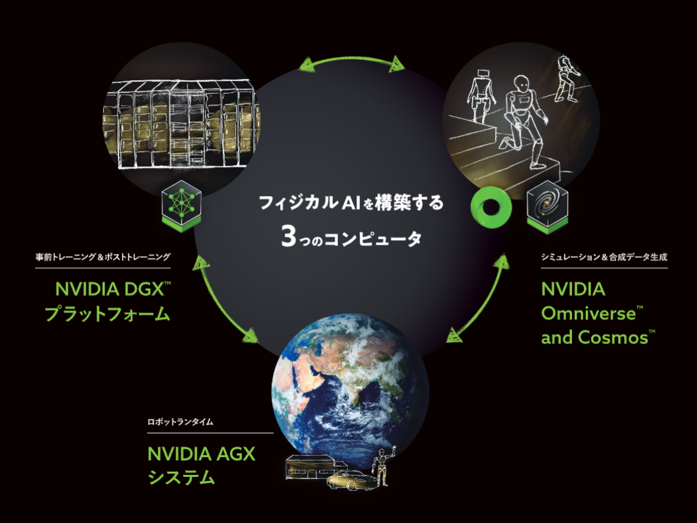
This time, Macnica exhibited under the theme of "Three Computer Solutions" advocated by NVIDIA.
A Three-Computer Solution: Powering the Next Wave of AI Robots
For more details about these "three computers," please check the website above, but to briefly explain the overview,
① "Learn" (train) the AI model using large amounts of data
② "Test" the robot in a virtual space (simulation)
3. The learned and tested content is then "implemented" (deployed) on the robot itself.
The process is as follows.
By utilizing AI, we believe that we can move away from conventional rule-based robot operations and create robots that can handle a variety of uses (multitasking).
At this exhibition, we will be showcasing some of these solutions.
Dataset generation/expansion for AI model creation

This exhibition introduced examples of "testing" and "dataset generation" using robot simulation in a virtual space, as well as "dataset expansion," which automatically generates variation videos by replacing objects in the generated dataset video.
In the "Dataset Generation" section, we exhibited a demo of Pick&Place, which recreates robots and work environments in a virtual space and simulates real-world work scenarios. This utilizes the NVIDIA Omniverse™ library and NVIDIA Isaac Sim, an open-source robotics simulation framework. Data that is difficult to collect on-site can be safely collected in large quantities anytime and anywhere in a virtual space.
Furthermore, we used the NVIDIA Cosmos™ world-based model to expand the dataset video by adding various conditions and variations.
Dataset generation/expansion improves the versatility and adaptability of AI models, enabling the development of robust robotics AI that can withstand unexpected situations in real-world environments.
Robot control using digital twins

Simulations are performed in both virtual and real spaces to evaluate movement, precision, reaction speed, etc. This is a technical verification that is directly linked to actual robot operation.
Utilizing NVIDIA Isaac Manipulator, a software platform designed to accelerate the development of robotic arms, the system uses robot and obstacle information obtained from camera footage to generate the optimal path between two given poses in just a few seconds, allowing the robot to avoid unknown obstacles.
In this demonstration, the Gripper attached to the end of the arm is also controlled at the same time to perform pick and place operations while avoiding obstacles.
As an example, consider the automation of pick-and-place tasks using a robot on a production line in a factory. However, if the robot encounters an obstacle during the task, it will have to be stopped, resulting in reduced production efficiency.
Using this technology, obstacle avoidance becomes possible without teaching, making it possible to maintain production efficiency.
■References
・Isaac for Manipulation Reference Architecture
https://nvidia-isaac-ros.github.io/reference_workflows/isaac_for_manipulation/reference_architecture.html
・cuRobo
https://curobo.org/
https://curobo.org/reports/curobo_report.pdf
https://github.com/NVlabs/curobo
・cuRobo and cuMotion
https://docs.isaacsim.omniverse.nvidia.com/latest/manipulators/manipulators_curobo.html
Pick & Place using a platform model to accelerate AI robot development

Using the NVIDIA Isaac GR00T™ N1.5 Vision Language Action (VLA) model, the robot arm SO-ARM101 demonstrates a series of tasks, picking up an object and placing it accurately in a specified location.
Isaac GR00T N is the world's first "open platform model for humanoid robots" developed by NVIDIA. Although it is designed for humanoid robots, it can also be used for robotic arms.
It is noteworthy that this demo was built using data from only about 30 teleoperation operations. GR00T N1.5's versatile inference capabilities and pre-training on large-scale data have made it possible to implement this with such a small dataset.
For this exhibit, the GR00T N1.5 has been finetuned and deployed on NVIDIA® Jetson Thor™, the latest Edge AI platform released in August 2025. Jetson Thor, designed for robotics, supports the robot's performance.
AI anomaly detection through video analysis

This is an anomaly detection demo using "NVIDIA AI Blueprint for Video Search and Summarization" (hereinafter referred to as VSS), a VSS agent provided by NVIDIA. Not only can it summarize the input video in text, but it can also analyze the content of the video and output text answers to prompt questions.
To put it simply, VSS is an AI platform that can analyze, summarize, and search videos.
The greatest value of VSS is that it can transform existing video assets and camera footage from mere records into actionable information.
Compared to traditional video analytics solutions, its features include the ability to automatically summarize important points and specified events of interest from videos, the ability to ask questions about the content of videos in chat format, and the ability to quickly implement it whether on-premise or on cloud.
These features are expected to shorten time to market, reduce costs, provide high cost-effectiveness, and deliver new solutions and business value.
NVIDIA has also uploaded a demo video to YouTube, which is in English, so please check it out. (It is a different video from the one shown here.)
Macnica 's future initiatives
That's the outline of what we will be exhibiting at this event. What do you think?
the Company Macnica, we are focusing on the social implementation of physical AI.
As a result, as a primary NVIDIA distributor, we not only provide product support, but also provide support services to help you solve any issues you may have.
We also welcome inquiries based on concerns such as, "There is a project running within the company and I would like you to support us."
If you are interested in collaborating with the Company, please contact us using the information below.