- Semiconductor BusinessHOME
- Products and Services of Macnica,Inc.
-
technical information

-
Events and Seminars
- Handling Manufacturer
- Support
- Inquiry
- Click here to purchase products
- Semiconductor business e-mail magazine registration
![]()
![]() Narrow down by specifying conditions
Narrow down by specifying conditions
現在2168件がヒットしています。check
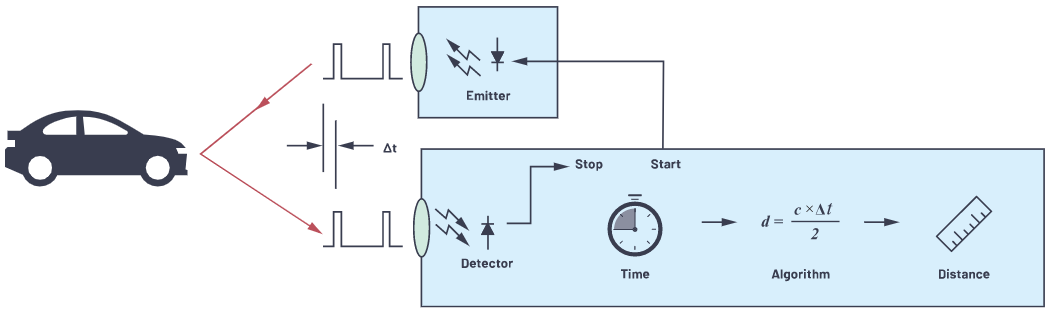
Measurement principle with ToF camera
A ToF camera measures depth by emitting modulated light, such as a laser, and capturing the light that bounces off an object. The distance can be determined by the time delay Δt between when the light is emitted and when the reflected light is received. The time delay is proportional to twice the distance between camera and object (round trip).
Therefore, the distance can be estimated as depth d = (c × Δt)/2. Here, c is the speed of light. In this way, a ToF camera can be used to measure 2D data and the necessary depth information.
This article introduces the details of Analog Devices' ToF camera module.
ToF camera module that accelerates application development

The analog front-end ADDI9036 from Analog Devices accelerates the development of your ToF camera application.
In addition, CIS Inc. (CIS), an alliance partner of Analog Devices, Inc., offers a ToF camera module DCC-RGBD1 that uses the ADDI9036. An easy-to-understand explanation of the ToF camera module DCC-RGBD1 and its mounted device!
Product features of DCC-RGBD1
Supports YUV+Depth
- ToF has a CCD sensor with VGA resolution
- Quad VGA resolution Global Shutter CMOS sensor for RGB
- Synchronize and output YUV+ depth information using onboard FPGA
Wide range & high precision
- Compatible with WR (Wide Range) mode, seamless ranging from 30cm to 5m
- Compatible with SN (Super Near) mode, compatible with sizes from 15cm to 70cm
- WR mode: standard deviation rate 2.0% or less, SN mode: standard deviation rate 1.5% or less
Compact, USB connection possible
- Module size: WxHxD 55mmx50mmx 35mm
- Equipped with USB 3.0 microB connector (power supply not supported)
Development environment
- SDK for Windows/Linux
- Windows-based RGBDViewer for simple display of distance images
ROS driver package
- Supported OS: Ubuntu Linux
- ROS Driver: Supports ROS versions Kinetic and Melodic
- ROS Kinetics: Ubuntu 16.04, Ubuntu 18.04
- Acquisition of depth, IR, and color images
- Acquisition of depth, IR, and color images
- 3D display of processing results in RViz
- Parameter change, point cloud processing, noise removal, plane detection/removal, object point group extraction, coordinate calculation
Source: TORK (Tokyo Open Source Robotics Association)
CCD ToF Signal Processor ADDI9036 with Programmable Timing and V-Driver
The ADDI9036 is a highly integrated device that integrates an analog front end, a programmable instruction set architecture timing generator, a 7-channel laser diode driver, a 7-channel H-driver, and a 16-channel vertical driver (V-driver) for high precision. It is the best product for ToF CCD cameras.
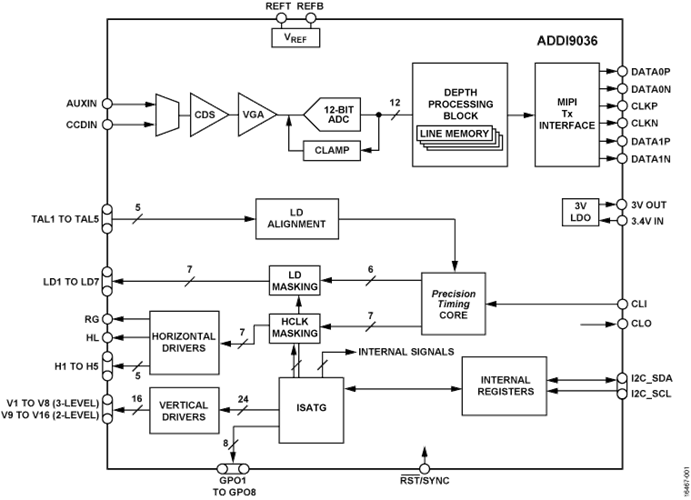
Since the ADDI9036 is a highly functional product, it requires considerable development resources to fully utilize it. In addition, since ToF camera development also requires specialized know-how, the ToF camera module provided by CIS solves these issues.
Demonstration video using ToF camera module
This is a demonstration video that actually uses the ToF camera module introduced in this article to measure the distance to a person.
Application example
- robot vision
- logistics
- AGVs
- surveillance
- medical care



Inquiry / Quotation
In this article, we have explained camera modules and mounted devices that accelerate the development of ToF camera applications. For more information, please contact us below.
In addition, we held a seminar in the past called "ToF camera development application seminar" related to this article. If you would like to request materials for the seminar that was held, please contact us with "Request for ToF camera development application seminar materials" in the content of the inquiry.
Analog Devices Manufacturer Information Top
If you want to return to Analog Devices Manufacturer Information Top, please click the button below.