- Semiconductor BusinessHOME
- Products and Services of Macnica,Inc.
-
technical information

-
Events and Seminars
- Handling Manufacturer
- Support
- Inquiry
- Click here to purchase products
- Semiconductor business e-mail magazine registration
![]()
![]() Narrow down by specifying conditions
Narrow down by specifying conditions
現在2183件がヒットしています。check

Overview of Current Sensing Architectures in Motor Drives
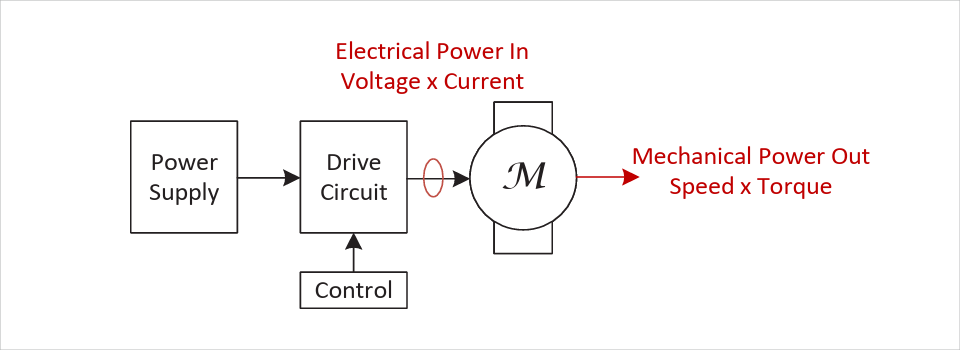
One of the more common uses of current sensors is in the wide range of applications in motor drives. Motors are electromechanical systems that convert electrical energy (voltage and current) into mechanical energy (torque and speed). Proper operation of a motor requires a well-controlled electrical drive, which in turn requires accurate measurement of the current flowing through one or many of the motor's coils.
Traditionally, motors can be divided into several categories based on their type. Motors can range from one phase (or motor coil) for typical motors up to three phases, with higher phase counts possible for motor types such as stepper motors and brushless DC. Different motor types require different power driver circuits and recommended current sensing methods.
| Category | Brushed DC (BDC) | Universal | Unidirectional Stepper | Bidirectional Stepper | Brushless DC (BLDC) | Switched Reluctance (SRM) | AC induction (ACIM) |
| rectification | Mechanical | Mechanical | Electric | Electric | Electric | Electric | Electric |
| Input Control | DC | AC or DC | AC | AC | AC | AC | AC |
| Typical number of phases | 1 | 1 | 2 (center tap) | 2 | Single phase: 1 Three phase: 3 |
3 | 1 or 3 |
| Typical power driver circuit | Low-side/High-side MOSFET or H-bridge | Triac | Four low-side MOSFETs and recirculation diodes | Two H-bridges | Single phase: H-bridge Three-phase: three 1/2-H bridges |
Three-phase asymmetric bridge or three-phase mirror inverter |
Triac or Three-Phase Variable Frequency Drive |
| Typical current detection methods | 1x high side/low side or 1x inline |
1x isolated inline or 1x low side |
4x Low Side | 2x high side/low side or 2x inline |
1x, 2x, or 3x High Side/Low Side or 2x/3x inline |
3x High Side/Low Side or 3x inline |
2x/3x Low Side or 2x/3x isolated in-line |
Brushed DC motors and universal motors have mechanical commutation and will rotate whenever a DC voltage is applied. In these motor types, current sensing is used to determine the motor's load (torque output) and to detect fault conditions (e.g., motor winding shorts). One unique current sensing application for brushed DC motors and universal motors is ripple counting, which precisely measures the motor current to detect current ripple due to commutator movement and, therefore, to determine motor speed.
Other motor types require electronic commutation, which means the system controller must measure motor state (voltage, current, rotor position) to determine how to drive the motor. Therefore, current sensing not only serves the same function as for brushed DC, but also requires real-time measurement of the current in each motor coil to properly commutate the motor and keep it spinning. For example, a brushless DC motor's control algorithm may require current sensor feedback to commutate the motor. These motor types typically require a current sensor with sufficient bandwidth to measure phase currents, perform calculations, and apply new outputs to the power driver circuitry. This real-time control loop must operate at a rate fast enough to support the motor's performance goals and with a sufficiently short total latency.
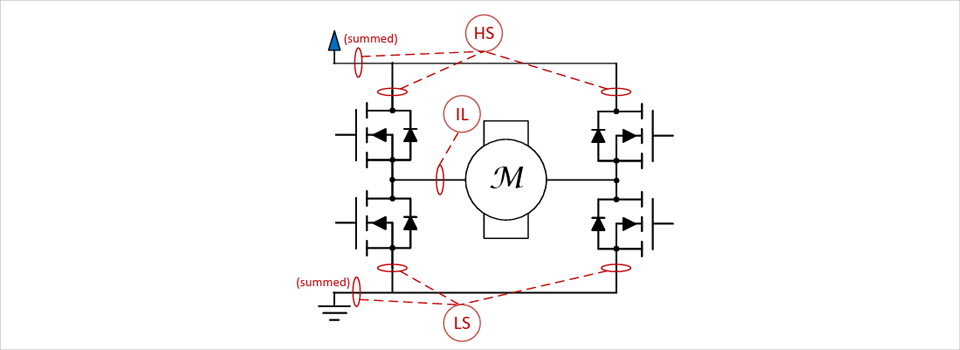
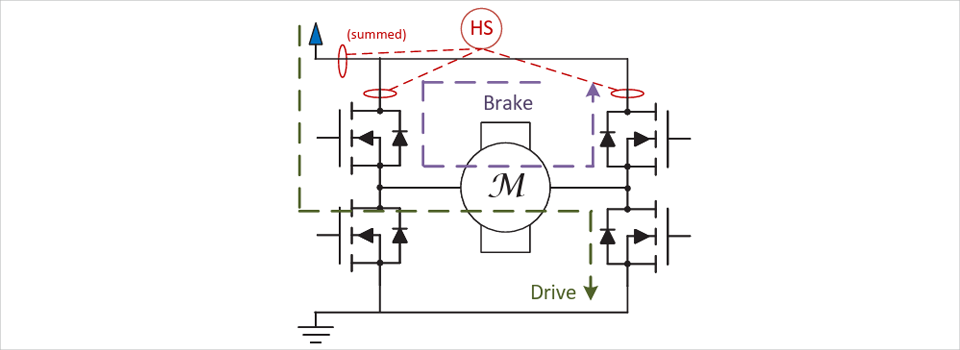
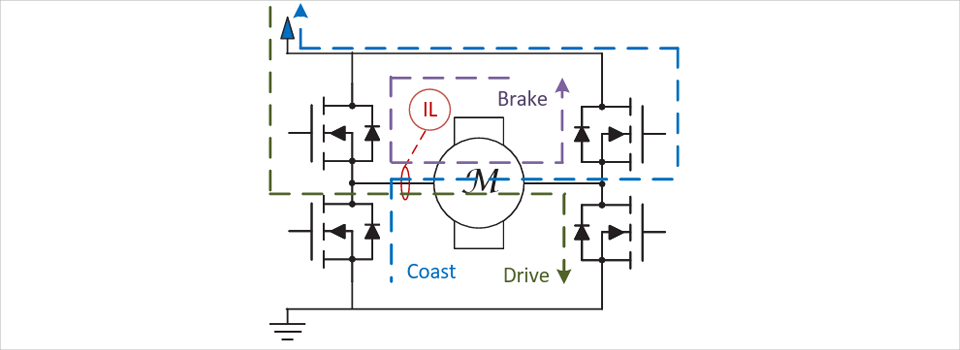
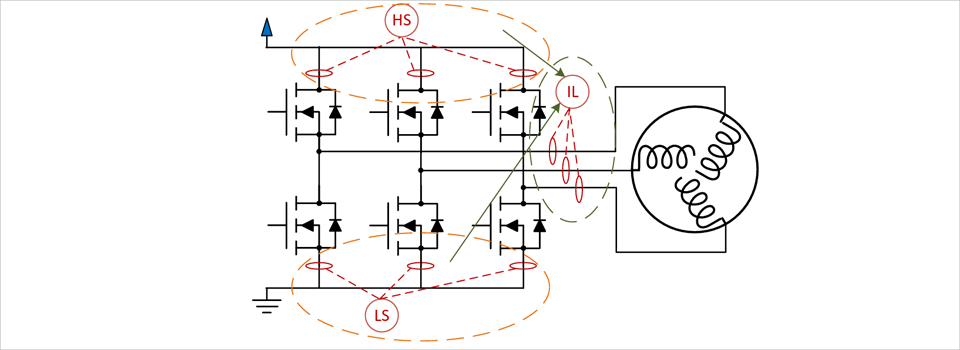
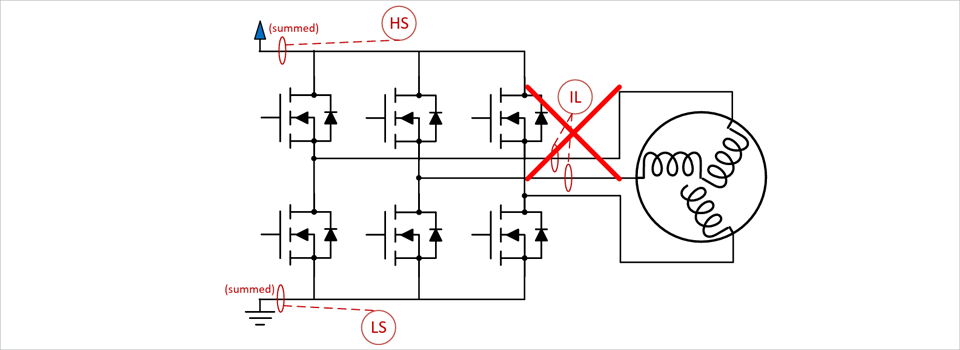
In addition to these considerations, motor driver circuits have multiple possible configurations for placing current sensors within the power driver circuit. For example, a brushed DC motor driver circuit is an H-bridge, and the motor current can be measured in one (or more) of many different locations. A low-side (LS) measurement is made at the "bottom leg" of a 1/2-H-bridge, or as a single summed measurement of both H-bridge legs. A high-side (HS) measurement can similarly be made at the top of a 1/2-H-bridge, either per leg, or as a summed high-side. A single in-line (IL) current measurement can be used in series with the motor, since there is only one phase.
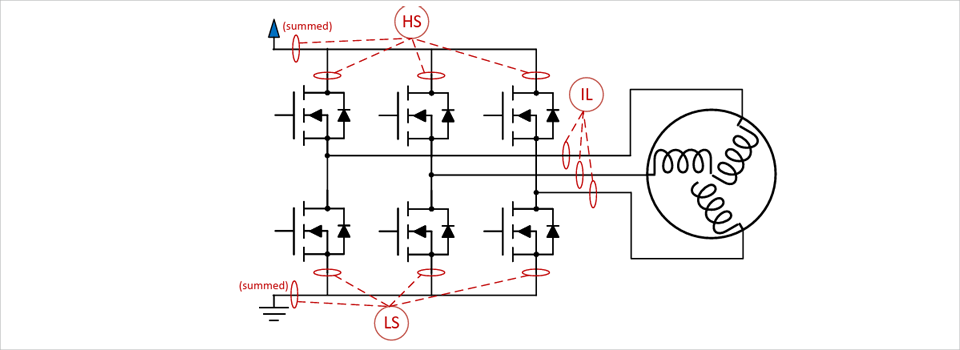
A three-phase brushless motor driver circuit is similar to the brushed DC case, but there are many more points where current can potentially be measured. Instead of two 1/2-H bridges, there are three. While in-line current measurements can occur on three motor phases, it is mathematically possible to get away with measuring only two of the three based on Kirchhoff's current law (I_A + I_B + I_C = 0).
Low side current sensing
Low-side current sensing is considered the most common method for many motor types. Cost-sensitive applications, such as brushed DC motor applications, tend to use low-side current sensing. Low-side current sensors can be configured to sense the current through each 1/2-H-bridge leg or phase, or as a single total current. While the low-side current sensing method is the lowest-cost option from a components perspective, it does present several system-level challenges to the designer.
Low-side current sensing has some distinct advantages.
- The common mode voltage at the sensor location is low or close to ground
Sensors can have low voltage ratings and may not require isolation
When the low-side MOSFET is on, the sensor can be used to detect a system short to the battery
However, there are some important drawbacks.
The sensor cannot detect a system short to ground
The sensor can measure current only when the corresponding low-side MOSFET is on.
The controller must carefully synchronize the sensor readings with the PWM
The sensor requires high bandwidth to sample during PWM
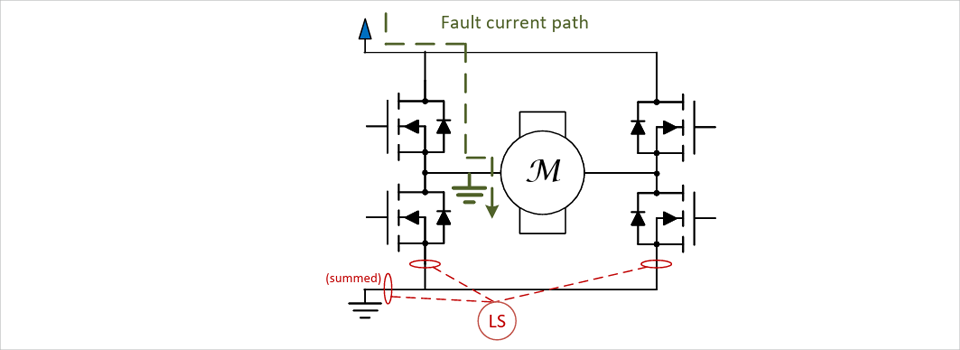
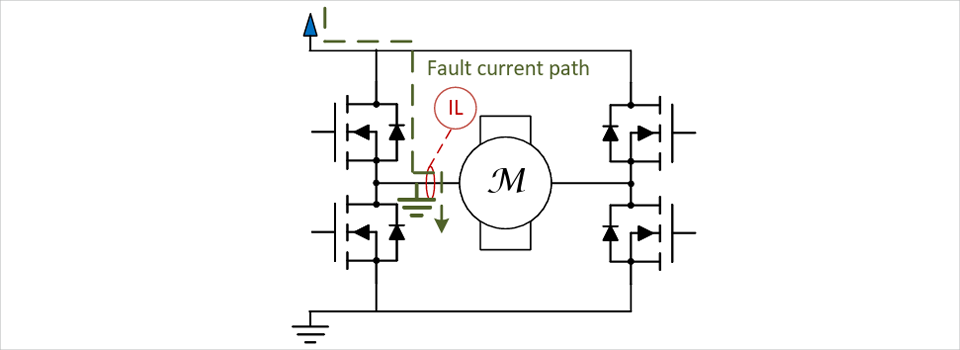
A system short to ground, such as a loose wire touching the chassis, is classically the most common failure mechanism, but a low-side current sensor cannot detect it. A short to ground at the motor terminal creates a current path that bypasses the low-side current sensor. If this failure is an important consideration for the system designer, a low-side current sensor is not a good solution for protecting the system.
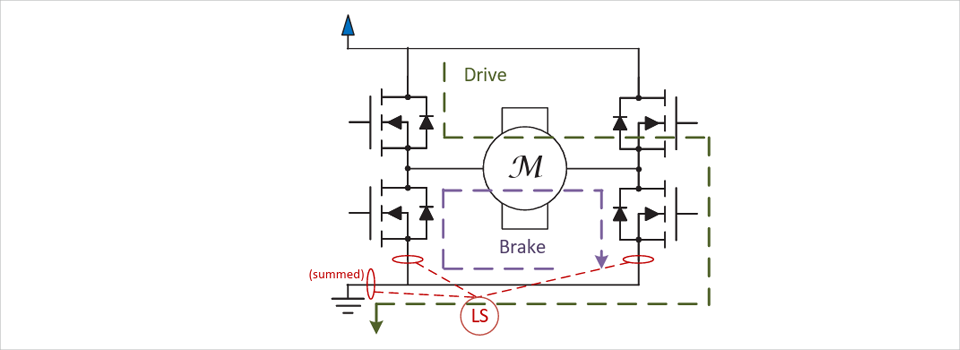
When using a low-side current sensing method, motor current can only be measured during certain driver operating modes, depending on the current sensor's location. Taking a brushed DC motor as an example, the drive current to the motor flows through one leg and a common ground, allowing the current to be sensed at either end. However, in braking mode, when both low-side MOSFETs are on, the current recirculates between both low-side MOSFETs without returning to the common ground. Individual low-side sensors for the legs of the 1/2-H bridge detect this current, but the summed low-side current sensor does not. If braking mode must be implemented with two high-side MOSFETs instead of two low-side MOSFETs, the low-side current sensor cannot detect the current. Recirculating current can be important to measure in systems where the motor is externally rotated, effectively acting as a generator.
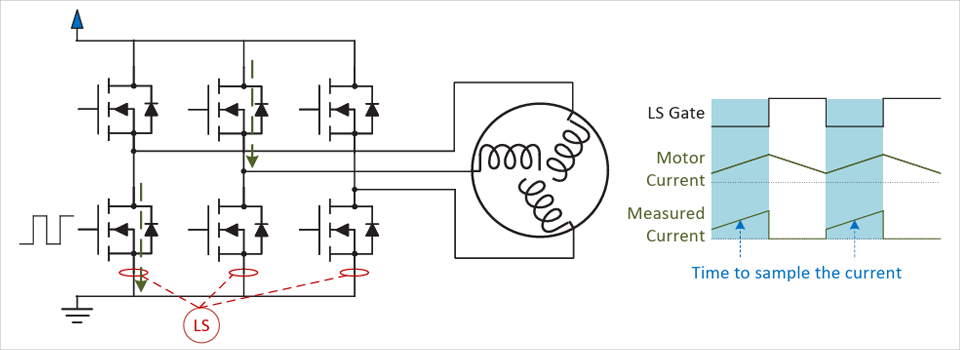
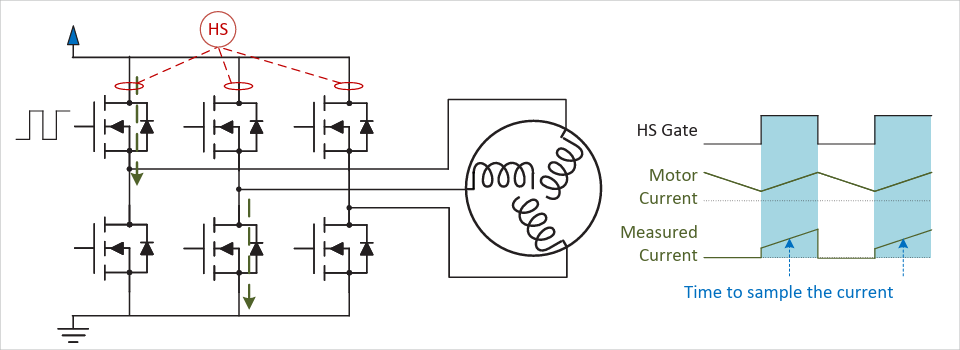
The strategy for sampling the motor current is also influenced by the choice of low-side current sensor. The system controller must carefully time the measurement with the motor drive's pulse-width modulation (PWM), because the sensor can only sense the current when the corresponding low-side MOSFET is on. This can cause timing issues when the PWM frequency is very high or when the PWM duty cycle is very high. Both situations can result in a very short on-time of the low-side MOSFET, thus creating a very narrow window for capturing the true motor current. The current sensor's bandwidth must be high enough to adequately sample the current within this window, and the current sensor's settling time also significantly affects the usable time within that window.
Implementing low-side current sensing using a magnetic current sensor offers several advantages over sense resistor-based solutions. Magnetic sensors offer the potential for a smaller solution size compared to current shunt resistors and current shunt amplifiers, thereby reducing board size. In the event of an extreme overcurrent, the sense resistor can fail open, resulting in the full supply voltage being applied to the input of the current sense amplifier. This event can cause cascading failures to the current sense amplifier and potentially further circuitry on the board. Magnetic sensors are non-conductive, therefore providing additional isolation in the event of a conductor blown open.
When selecting a magnetic current sensor for a low-side current sensing application, several parameters must be considered: the range of the current to be sensed, the sensing polarity, and the bandwidth. Current sensor polarity can be either unidirectional or bidirectional. Unidirectional sensors have a dynamic range optimized for measuring currents flowing in one direction, while bidirectional outputs can measure currents flowing in either direction. Many systems implementing low-side current sensors can use a unidirectional output because the nominal drive current to be measured flows only in one direction toward a common ground. However, some systems may choose a bidirectional current sensing method to measure currents when operating in recirculating conditions (coasting or braking) where current flows in the opposite direction. Bidirectional sensors can be used in unidirectional sensing systems by sacrificing approximately half of the output dynamic range. Because the ADC resources of most microcontrollers have significantly higher resolution than the output of a magnetic current sensor, system accuracy is often not affected by using a bidirectional sensor instead of a unidirectional sensor.
When using a low-side current sensor, the bandwidth must be selected so that the sensor can react fast enough as the driver stage turns on and off during PWM. Actual motor currents may not have a very high bandwidth because the motor acts as a large low-pass filter. However, to properly measure the current during the PWM period when the low-side MOSFET is on, the current sensor must have a bandwidth significantly higher than the PWM frequency (e.g., more than twice as high), although this depends on the specific design requirements.
Below are some examples of low-side current-sensing device selection:
| Input parameters | Case 1 | Case 2 |
| Current detection range (A) | 9A | 9A |
| Detection Polarity | bidirectional | Unidirectional |
| PWM frequency (Hz) | 20kHz | 60kHz |
| Target Device | ACS71240 | ACS730 |
| Justification | Selectable bidirectional or unidirectional, supports 10A current range (next highest option), bandwidth is 120kHz, well above 20kHz | Bidirectional, 20A current range (next highest option), bandwidth is 1MHz, well above 60kHz |
| Alternative Devices | ACS711 | – |
| Justification | Bidirectional, supports 10A current range (next highest option), bandwidth is 100kHz, well above 20kHz | – |
High side current sensing
High-side current sensing is an alternative method for sensing motor current. As with the low-side, high-side current sensors can be configured to sense the current through each half-H-bridge leg or phase, or as a single total current. High-side current sensing methods typically present higher component costs than low-side, but can be slightly lower than in-line current sensing.
High-side current sensing has one important advantage over low-side sensing.
The sensor can detect a system short to ground when the high-side MOSFET is on.
However, there are some drawbacks.
The sensor requires a high common-mode voltage rating or isolation.
The sensor cannot detect a system short to the power supply.
• The sensor can measure current only when the corresponding high-side MOSFET is on.
- The controller must carefully synchronize the sensor readings with the PWM.
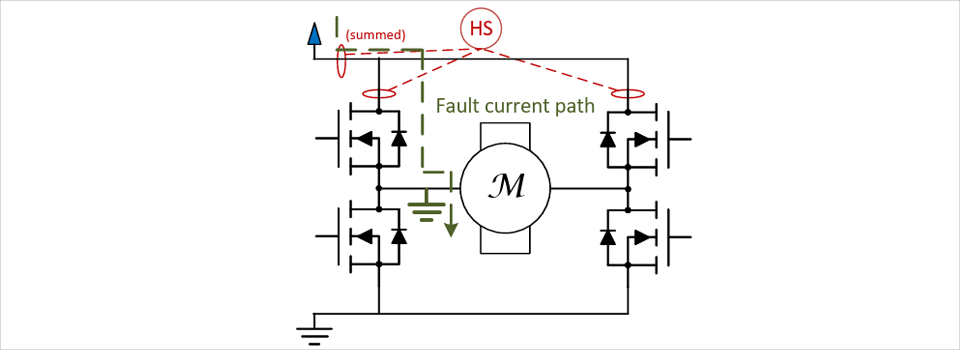
High-side current sensors are primarily used when customers must detect system-level shorts to ground. As mentioned previously, this can be the most common failure mechanism. With low-side detection, the fault current path bypasses the sensor. When a high-side current sensor is used, the fault current flows through the current sensor, and this failure mode can be properly detected so that the system can respond.
Unlike low-side current sensors, high-side current sensors require high common-mode operation. The sensor is referenced to the power supply or battery rather than ground. If the supply voltage is high enough, isolated current sensors are a good choice. This higher voltage range typically results in more expensive components compared to low-side current sensors.
The high-side current sensor, like the low-side, allows motor current measurement only during certain operating modes of the driver. Again, with a brushed DC motor, the drive current to the motor flows through a common power supply and one leg, and either can sense the current. However, in braking mode, when both high-side MOSFETs are on, the current recirculates between both high-side MOSFETs without returning to a common ground. Individual high-side sensors for the legs of the 1/2-H-bridge sense this current, but the summed high-side current sensor does not. If braking mode must be implemented with two low-side MOSFETs instead of two high-side MOSFETs, the high-side current sensor cannot sense the current.
Current sense measurements are affected by the choice of high-side current sensor. PWM synchronization is required. A high-side sensor can only sense current when the corresponding high-side MOSFET is on. This can cause timing issues when the PWM frequency is very high or the PWM duty cycle is very low. Both situations can result in a very short on-time of the high-side MOSFET, and therefore a very narrow window for capturing the true motor current.
Again, implementing high-side current sensing using a magnetic current sensor offers several advantages over sense resistor-based solutions. The magnetic sensor can be smaller than a sense resistor and external shunt amplifier. Many magnetic current sensors incorporate basic or reinforced isolation to support high supply voltages, further reducing the need for on-board components.
When selecting a magnetic current sensor for a high-side current-sensing application, designers must consider the current, sensing polarity, and bandwidth, in addition to the operating voltage rating. As with low-side current sensors, high-side current sensors can be unidirectional or bidirectional. Systems may implement a unidirectional output to maximize the dynamic range of the output when driving current into the motor. Alternatively, using a bidirectional current sensor allows the system to measure current in recirculating modes (braking or coasting). Again, bidirectional sensors can be used in unidirectional sensing systems at the expense of dynamic range.
Sensor bandwidth for high-side current sensing must be considered similarly to low-side current sensing. The sensor bandwidth must be significantly higher than the PWM frequency because the system can only measure the motor current when the high-side MOSFET is on. For high-side magnetic current sensors, the device is expected to withstand the full system supply voltage. The component's working voltage rating must be selected to provide sufficient margin for any supply fluctuations during normal and abnormal operation of the motor. Many high-voltage systems have requirements for functional, basic, or reinforced isolation that must also be considered in the device selected.
Below are some examples of high-side current-sensing device selection:
| Input parameters | Case 1 | Case 2 |
| Current detection range (A) | 9A | 9A |
| Detection Polarity | bidirectional | Unidirectional |
| PWM frequency (Hz) | 20kHz | 60kHz |
| Absolute maximum supply voltage (V) | 24V battery, 55VDC abs max | 240VAC |
| Target Device | ACS711LC | ACS730LC |
| Justification | 100V isolation voltage covers 55V abs max, bidirectional, supports 10A current range, bandwidth is 100kHz, well above 20kHz | 2500Vp (1767VRMS) isolation voltage, bidirectional, 20A current range (next highest option), bandwidth is 1MHz well above 60kHz, Overvoltage Category (OVC) II |
| Alternative Devices | ACS71240LC | ACS732LA/MA |
In-line current sensing
In-line current sensing is a third option for motor drive circuits. In-line current sensing overcomes some of the drawbacks of both low-side and high-side sensing by measuring the current in series with the motor windings. In-line current sensing methods typically present a higher component cost than either low-side or high-side current sensing, especially when using sense resistor-based current sensing methods.
In-line current sensing has several significant advantages over low-side and high-side sensing.
The sensor can measure current regardless of the state of the power MOSFET.
- The controller does not need to synchronize sensor readings with PWM.
The sensor can detect a system short to ground when the high-side MOSFET is on.
When the low-side MOSFET is on, the sensor can be used to detect a system short to battery.
However, there are some important drawbacks.
The sensor requires a high common-mode voltage rating or isolation.
The sensor requires a very high common mode rejection ratio.
There is no way to have a single "sum" in-line current sensor.
In-line current sensors can be used to detect either system-level shorts to ground or power supplies and are most useful in system diagnostics to determine if one of these two failure modes has occurred. For customers who require detection of both failure modes, in-line current sensing is a better alternative to using both low-side and high-side current sensors in their system.
Like high-side current sensors, in-line current sensors require operation with a high common mode, which requires the sensor to support high voltages or have built-in isolation, but they also need to have very good common mode rejection.
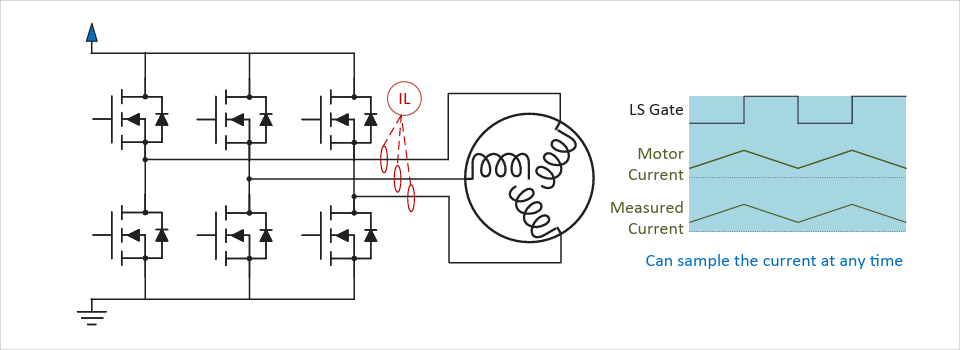
When a motor driver applies PWM to a motor, the phase alternates between low (close to ground) and high (close to power supply). An in-line current sensor "rides" on top of the PWM. Sensors used for in-line current sensing must have a very strong common-mode rejection ratio (CMRR), or the sensor output will be significantly affected each time the output switches.
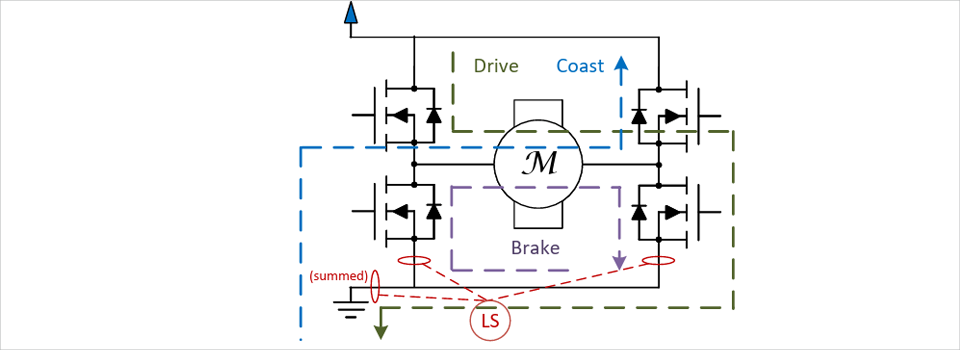
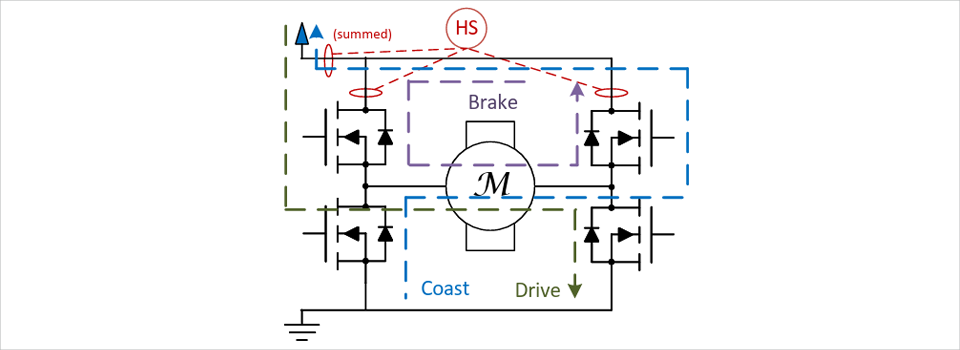
In-line current sensing greatly simplifies the conditions under which the sensor output properly reflects the actual motor current. Low-side and high-side current sensors require the corresponding MOSFET to be on and conducting, allowing the motor current to flow through the current sensor to generate an output. However, in-line current sensors have no such limitation. In-line current sensors measure the current in series with the motor winding, which is always representative of the motor current, regardless of the state of the power MOSFETs in the drive circuit. Current can be measured properly in drive, coast, high-side brake, or low-side brake.
In-line current sensing greatly simplifies how the controller samples the motor current. The controller can sample the sensor output at any time, regardless of the applied PWM, because the current sensor output is always representative of the motor current. In-line current sensing is the obvious choice for systems with very high PWM frequencies or systems requiring very high or very low duty cycles, because low-side and high-side current sensors can present timing issues when trying to capture the sensor output at the right time. In-line current sensing makes it much easier to average the motor current over long periods of time, which is not easy to do using low-side or high-side current sensors.
In-line current sensing using magnetic sensors offers several notable advantages over sense resistor-based solutions. Similar to low-side and high-side solutions, magnetic sensors offer a smaller total solution size, additional protection in the event of overcurrent, and built-in isolation. In-line current sensing also offers system-level benefits for magnetic sensors, which can improve the common-mode rejection ratio. Sense resistor-based solutions measure current via the voltage drop across the sense resistor. When PWM is applied to the motor, the voltage across the sense resistor and the common mode of the amplifier experience a change in that voltage, which must be rejected. Magnetic sensors do not measure voltage to determine the current, but rather measure the magnetic field generated by the current. This makes them much more immune to PWM.
When selecting a magnetic current sensor for an in-line current sensing application, four parameters must be considered: current, sensing polarity, bandwidth, and operating voltage rating. Due to the location of the in-line current sensor, bidirectional sensing polarity is most useful. Current can flow in either direction within the motor windings, necessitating a bidirectional sensing scheme. When using an in-line current sensor, the sensor's bandwidth does not need to exceed the PWM frequency, as is the case with low-side and high-side current sensors. In-line current sensors can have a bandwidth tuned to the motor current bandwidth, which can be much lower than the PWM frequency. In-line magnetic current sensors must withstand the same voltages as high-side magnetic current sensors. The component's operating voltage rating must be selected to provide sufficient margin for any supply fluctuations during normal and abnormal motor operation. Again, many systems have isolation requirements that must also be considered in the device selection.
Below are some examples of in-line current sensing device selection:
| Input parameters | Case 1 | Case 2 |
| Current detection range (A) | 9A | 9A |
| Detection Polarity | bidirectional | bidirectional |
| PWM frequency (Hz) | 20kHz | 60kHz |
| Absolute maximum supply voltage (V) | 24V battery, 55VDC abs max | 120VAC |
| Target Device | ACS711 | ACS724/25 LC |
| Justification | 100 V isolation voltage covers 55 V abs max, bidirectional, supports 10 A current range, bandwidth is 100 kHz, well above 10 kHz | Basic insulation voltage of 2500 Vp covers 120 V AC, bidirectional option, supports a current range of 20 A, and has a bandwidth of 120 kHz, well above 10 kHz |
| Alternative Devices | ACS71240 (QFN) | ACS71240 (SOIC) |
| Justification | 100V isolation voltage (QFN) covers 55V abs max, bidirectional, supports 10A current range, bandwidth is 120kHz, well above 10kHz | 2400V isolation voltage (SOIC) covers 120VAC, bidirectional, supports 10A current range, and has a bandwidth of 120kHz, well above 10kHz |
Magnetic Current Sensing in Low-Side, High-Side, and In-Line Current Sensing
Having covered case-by-case examples using magnetic current sensors, it is now possible to compare them side by side.
| type | Low Side | High Side | Inline | ||
| image |  |
 |
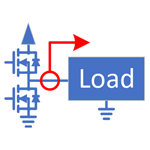 |
||
| Detects short to GND | ✔ | ✔ | ✔ | ||
| Detects shorts to power | ✘ | ✘ | ✔ | ||
| Asynchronous with PWM | ✘ | ✘ | ✔ | ||
| Voltage Rating | Low (< 20V) | High, power dependent | High, power dependent | ||
| Required Bandwidth | Higher than PWM | Higher than PWM | Higher than the motor | ||
| polarity | Unidirectional or bidirectional | Unidirectional or bidirectional | Two-way only | ||
| Possible configurations | 1 per 1/2-H | Total 1 | 1 per 1/2-H | 1 total | 1/2-H 1 per bridge |
| LS brake measurement | ✔ | ✘ | ✘ | ✔ | |
| HS brake measurement | ✘ | ✔ | ✘ | ✔ | |
| Measure coasting conditions | ✔ (two-way only) | ✔ (two-way only) | ✔ | ||
| Measure drive status | ✔ | ✔ | ✔ | ||
| Magnetic Solutions Compared to Shunt-Based Current Sensing | Smaller solution size, fail-open, and overvoltage stress protection | Smaller solution size, basic or reinforced isolation included | Smaller solution size, built-in basic or reinforced isolation, PWM rejection | ||
| Device example | Low voltage: < 100V Bidirectional: ACS711 (SOIC/QFN), ACS71240EX (QFN), ACS730 (SOIC), ACS724/25LC (SOIC) Unidirectional: ACS71240EX (QFN) |
Low voltage: < 100V |
Low voltage: < 100V ACS711 ACS71240EX High voltage: >100V 2.5kVp: ACS724/25LC 6kVp: ACS37002LA 4kVp: ACS724/5MA |
||
While most shunt resistor-based current sensing methods currently use low-side current sensing architectures, magnetic current sensors offer potential advantages when migrating directly to an in-line architecture. In low-voltage systems (i.e., less than 100V), the devices listed in the table above support voltage ratings of at least 100V, allowing the same component (i.e., the ACS711) to be used as either a low-side, high-side, or in-line current sensor. This conversion allows designers to achieve more robust motor current measurements that can be sensed regardless of the power stage's drive state.
Customers would not choose to move to an in-line architecture for brushless DC or other multi-phase motors where only a single low-side or high-side current sensing is required. Moving to an in-line current sensing scheme would require at least two current sensors compared to a single total current sensor, significantly increasing the total system component count. Even in these cases, using a single low-voltage magnetic current sensor can be a worthwhile design option to reduce the system solution size by eliminating the sense resistor. Magnetic current sensors also increase the sensor's robustness against cascading damage caused by open-circuit sensing element failures, as previously mentioned.
In high-voltage systems, basic or reinforced isolation integrated into magnetic current sensors is extremely valuable in achieving the performance requirements of high-side or in-line current sensing. Typical sense resistor-based approaches require an external sense resistor, amplification stage, digitization, communication across the isolation barrier, and signal reconstruction. The primary (high-voltage) side of the circuit requires some supply voltage to power the input circuitry. This can be compared to magnetic current sensors, which have no active circuitry on the primary side, thus resulting in a lower total component count system solution.
| Circuit Type | Circuit Diagram |
| Isolated Sense Amplifier | 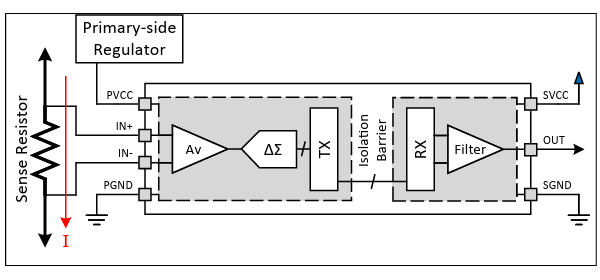 |
| magnetic current sensor | 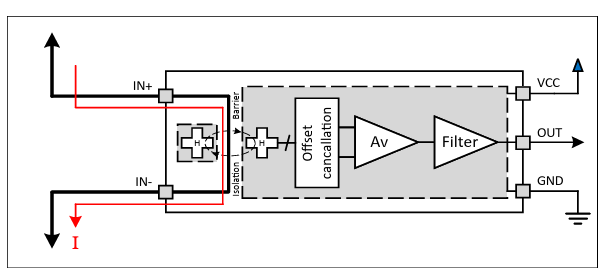 |
Conclusion
After reviewing the purpose of current sensors in motor drive applications and the potential system architecture options for designers, it is possible to cover some best practices when selecting a magnetic current sensor for a motor drive system.
- Magnetic current sensors offer the greatest benefits if you are currently using or migrating to in-line current sensing. Consider using in-line current sensing for simplified output sampling, measurement under all motor drive conditions, detection of short-to-GND conditions, and reduced sensor bandwidth requirements.
- Choose an isolation voltage rating for the magnetic current sensor that is significantly higher (i.e., at least +20%) than the maximum possible supply voltage that the system can see during normal operation and during fault conditions such as overcurrents.
- Ensure that the bandwidth of the magnetic current sensor device has enough margin (i.e., more than 2x) over the PWM frequency for low-side and high-side applications, and enough margin over the motor current bandwidth for in-line applications. In-line applications often allow the use of lower bandwidth devices compared to high-side and low-side.
- Select the current measurement range of the magnetic current sensor to most closely cover the target motor current range to be sensed. For example, if the motor is rated at 5A RMS and 10A peak, select a current sensor with a current measurement range of at least 10A.
- The most common output polarity is bidirectional, but unidirectional polarity can be used to effectively double the output signal in some low-side and high-side applications where reverse current measurement is not required. Most microcontroller ADC resources have significantly higher resolution than the output of magnetic current sensors, so system accuracy is often not affected by choosing a bidirectional sensor over a unidirectional sensor.
Revision history
| number | date | explanation | Person in charge |
| — | March 29, 2023 | First edition | Tyler Hendrigan |
Copyright 2023, Allegro MicroSystems
The information contained in this document does not constitute any representation, warranty, commitment, or inducement from Allegro to the customer regarding the subject matter of this document. The information provided does not guarantee that any process based on this information is reliable or that Allegro has investigated all possible failure modes. It is the customer's responsibility to perform sufficient qualification testing to ensure that the final product is reliable and meets all design requirements.
Any copies of this document are considered uncontrolled documents.
Inquiry
If you have any questions regarding this article, please contact us below.
Allegro MicroSystems Manufacturer Information Top Page
Allegro MicroSystems Manufacturer Information If you would like to return to the top page, please click below.