
![]()
![]() 条件を指定して絞り込む
条件を指定して絞り込む
現在1888件がヒットしています。check

XP2210:UDR (Untethered Dead Reckoning) 対応モジュール
Semtech社GNSSモジュール:XP2210は、UDRに対応しています。本ページではUDR機能の紹介と、実際の測定結果を記載しました。
UDR (Untethered Dead Reckoning) とは
GPS衛星による位置情報測位にはDead Reckoningと呼ばれる技術があります。これは地下やトンネルなど、GPS衛星が見えない位置で、加速度センサーやジャイロセンサーなどを用いて現在地の推定位置測位をおこなう技術です。広くはカーナビゲーションの位置測位に使用されています。
UDRはUntethred Dead Reckoningの略で、外部に各種センサーを持たずとも高精度な自律航法が可能な技術とです。内部に持つ慣性航法装置 (Internal Navigation System, INS) を使用することで実現します。
GPSとINS
UDRはXP2210に内蔵するGPS、INS unitを使用して実現します。
GPSは既知の通りOpen skyの下GPS衛星より位置と情報を取得し提供する技術となります。信号特性は反射などに弱くOpen sky上の衛星を用いるため、建物などの屋内では受信感度が悪くなる傾向に有ります。
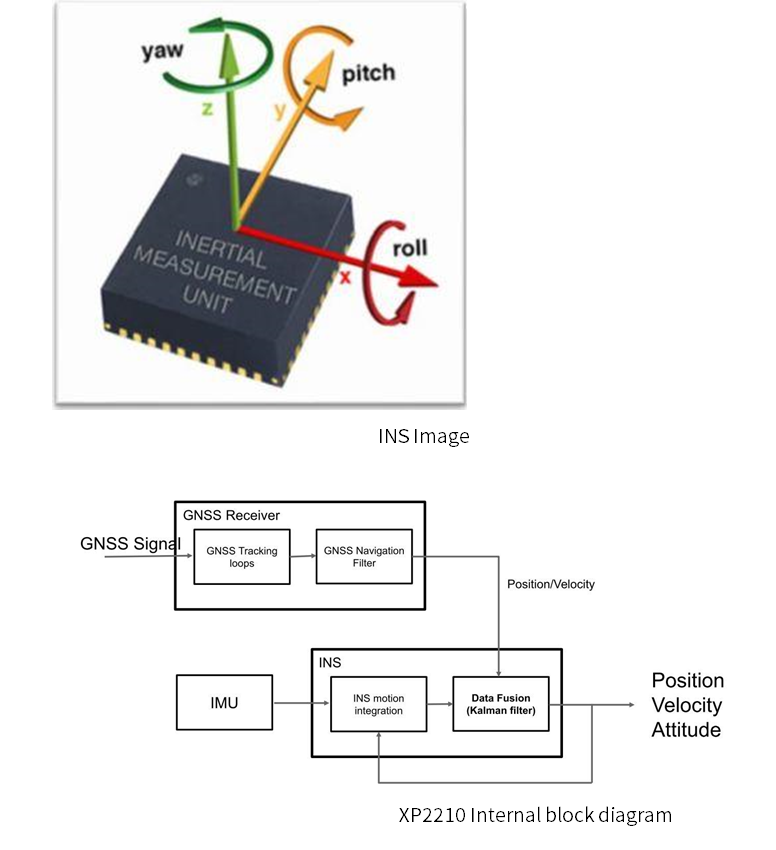
一方でINSは内部の慣性測定ユニット (IMS) を用いて加速度、角速度を算出します。右図の3軸加速度センサー、ジャイロセンサー、磁力センサーにより3方向の位置、速度、姿勢を計算します。衛星などは使用しないため、環境に依存せず算出をおこなうことが可能です。
XP2210ではGPSとINSを複合的に構成することでUDR技術を実現します。
UDRによる正確な位置情報の提供として、カルマンフィルターを利用します。これはOdometryとObservationという2パラメーターを用いた推定方式となります。Odometryは過去の推定値と現在の入力値から推定される現在の状態、Observationはセンサーによる観測値を指しています。Odometry=GPS、Observation=INSとすることでカルマンフィルターによる現在の位置情報をより正確に推定します。
測定環境
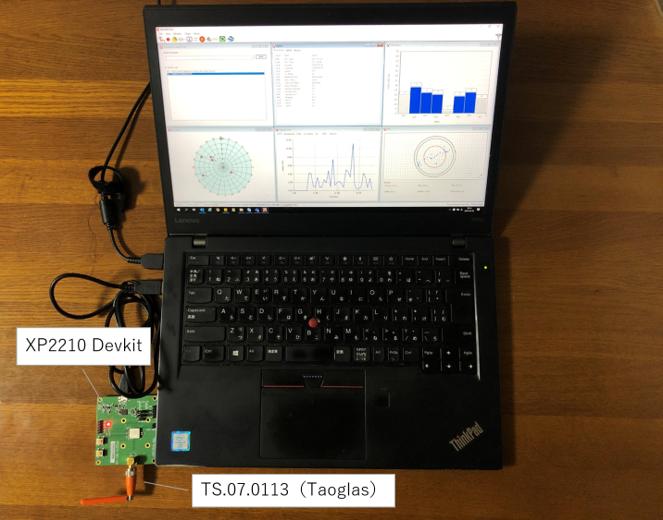
下記の環境で測定実施しました。
*XP2210 Development Kit ※
*GNSS Antenna: TS.07.0113 (Taoglas社製)※
*PC
*動作環境:車内
【手順】
①左図環境をセットアップ
②Sierra社提供GNSS tool立ち上げ
https://source.sierrawireless.com/resources/airprime/software/gnss_tool/#sthash.6ew5U897.dpbs
③Calibration実施
④GNSS測位開始
※弊社よりご紹介可能です。
UDR測定結果
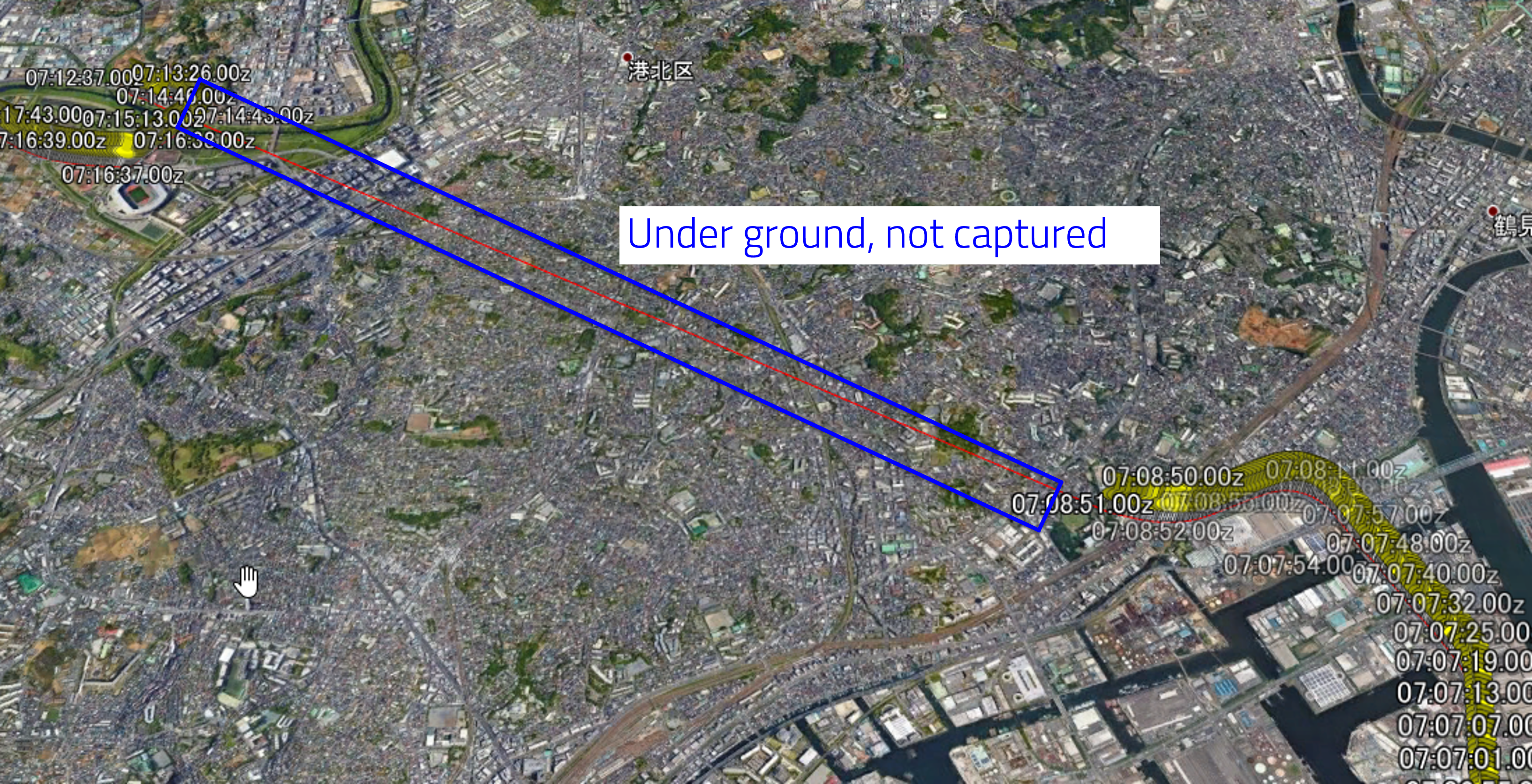
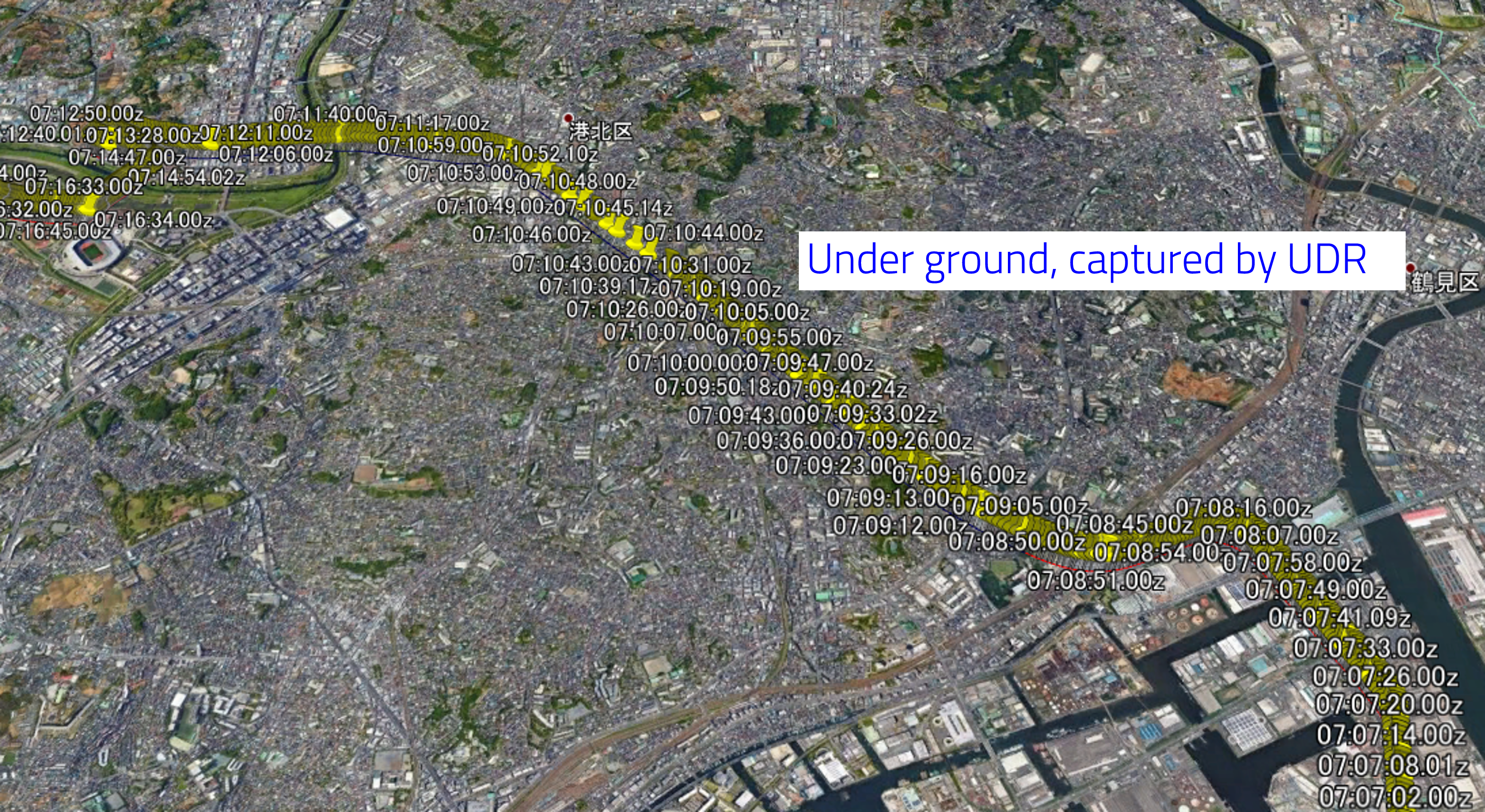
上記がUDR機能有無の結果となります。左図がUDR機能無し、右図がUDR機能有りとの比較です。今回は車載にXP2210を搭載し青枠で囲ったトンネルを介する経路にて測位を実施いたしました。
結果、UDR Disable時はNMEAデータlostすなわち位置測位できない状態であったのに対し、UDR enableによりINSを用いた推定位置を算出し断続的な位置測位を実現しました。
まとめ
本ページでは、XP2210のUDR機能の概要及び実測結果を紹介いたしました。結果、車載搭載での測定において外部環境及び移動速度に影響されることなく、UDRを活用した高精度な位置測位を実現いたしました。XP2210を用いる事で、移動体端末向けM2Mデバイスへの更なる適用が期待できます。
お問い合わせ / お見積もり
本製品に関してご質問、見積もりの希望などありましたら以下より問い合わせください。
セムテックメーカー情報Topページへ
セムテックメーカー情報Topページへ戻りたい方は、以下をクリックください。